Download to read offline

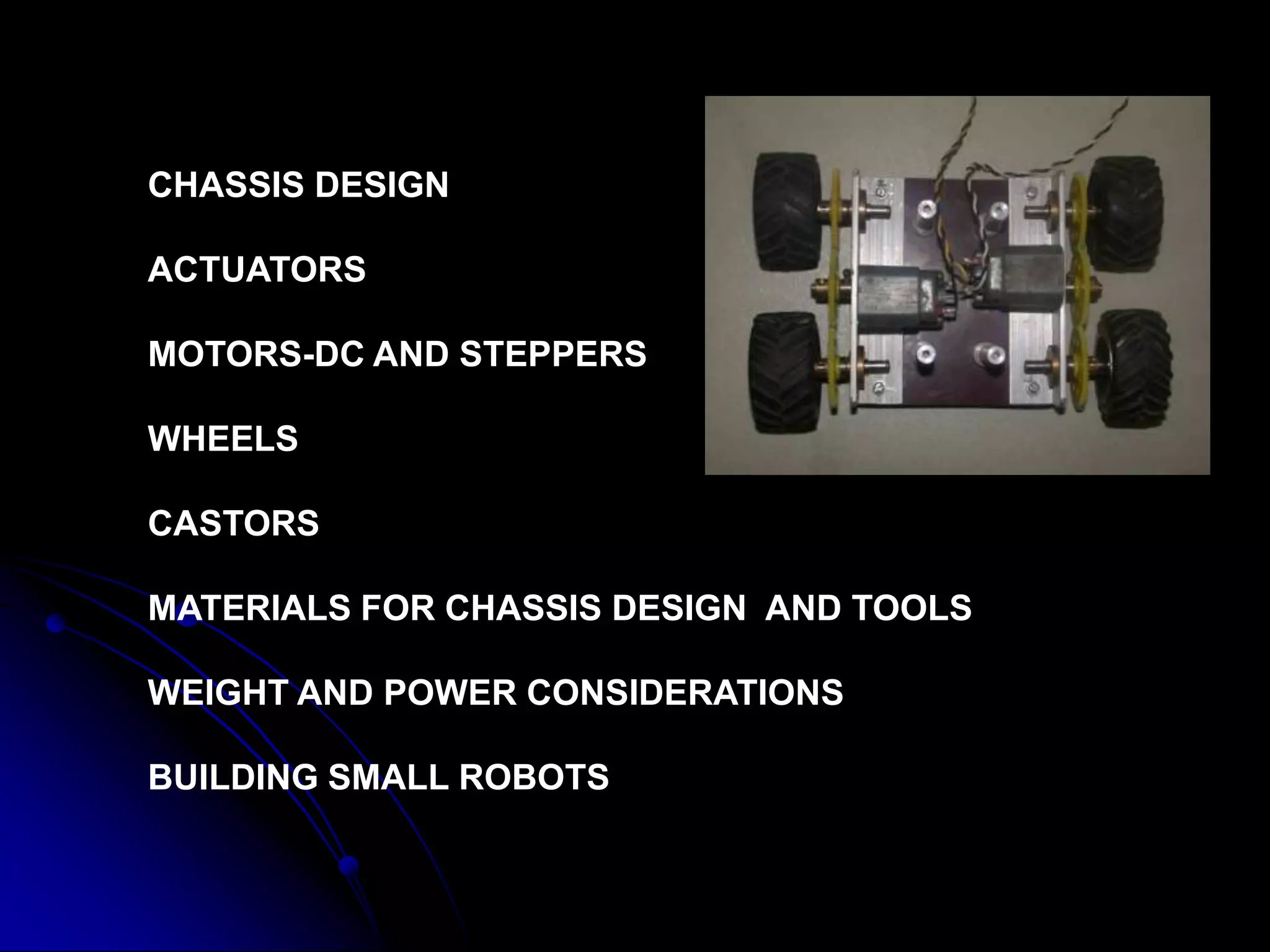
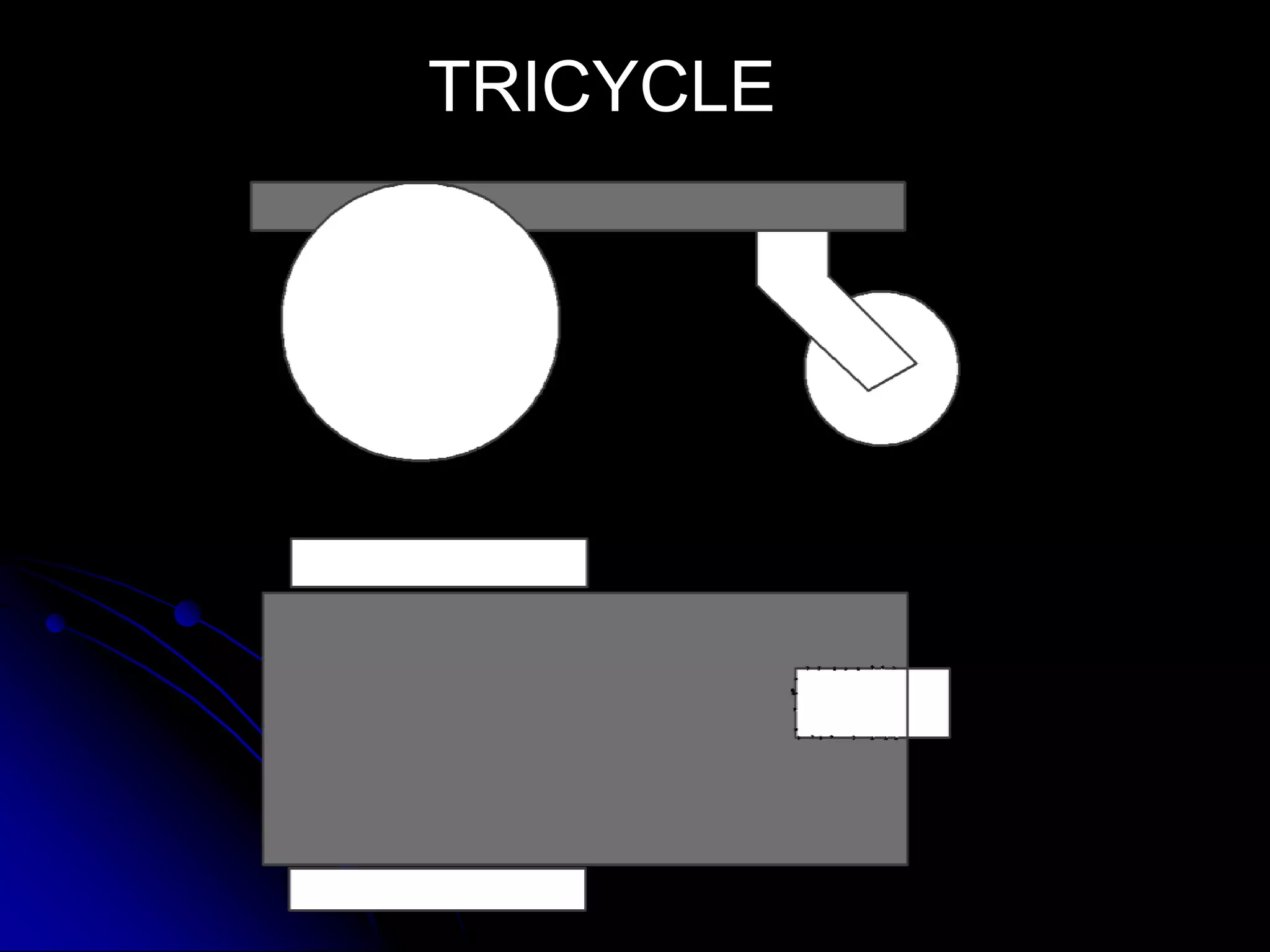
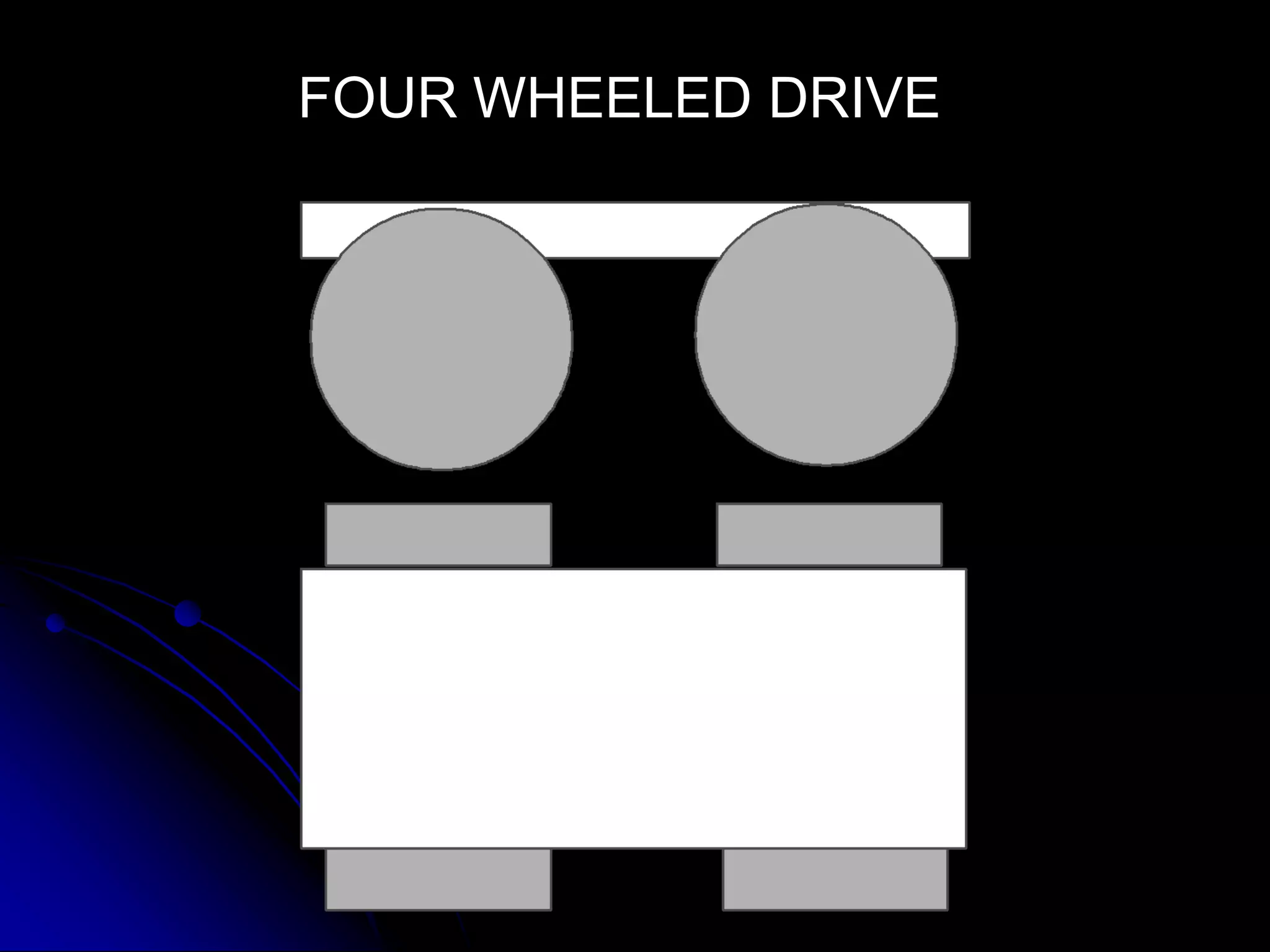
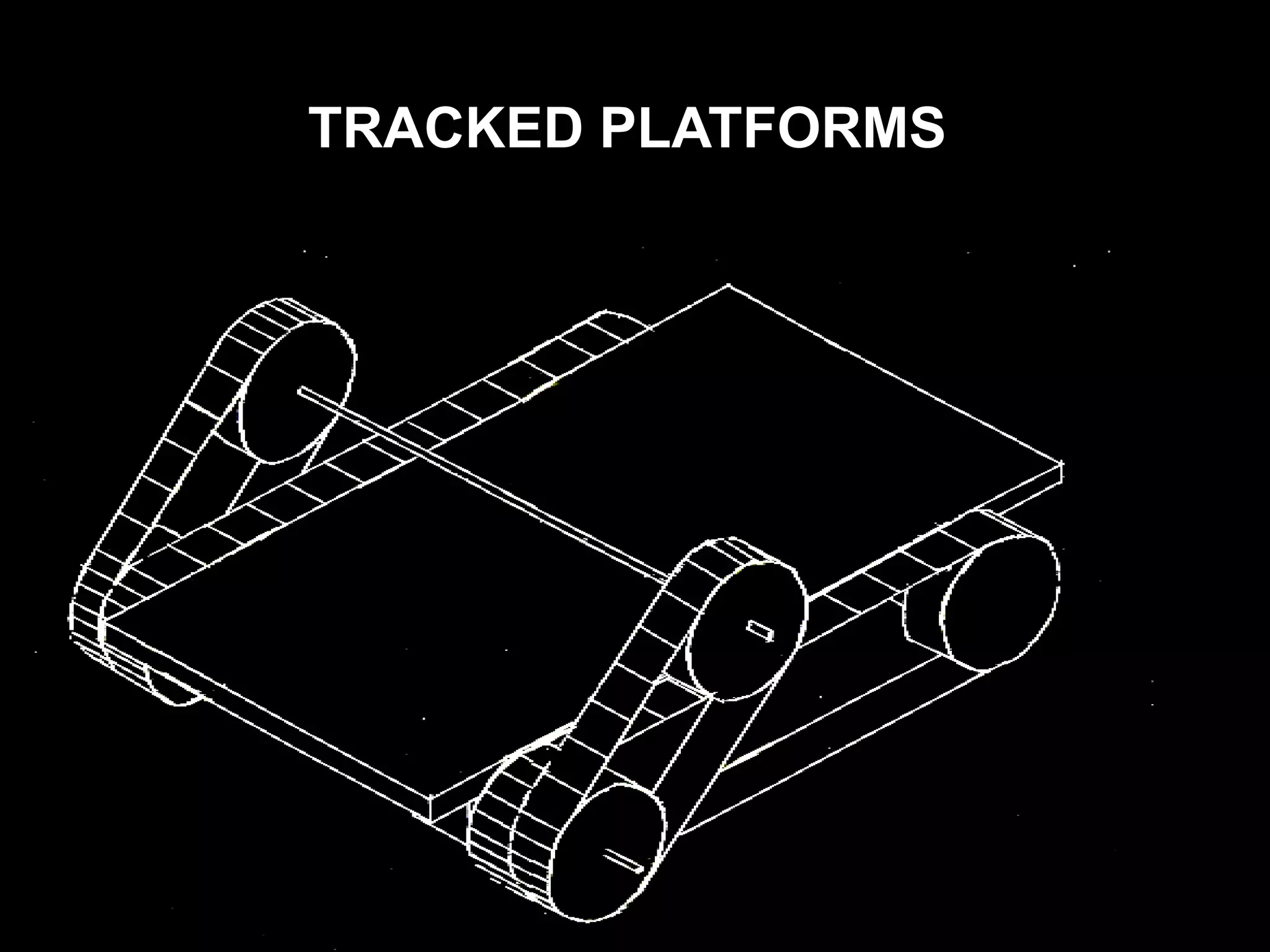
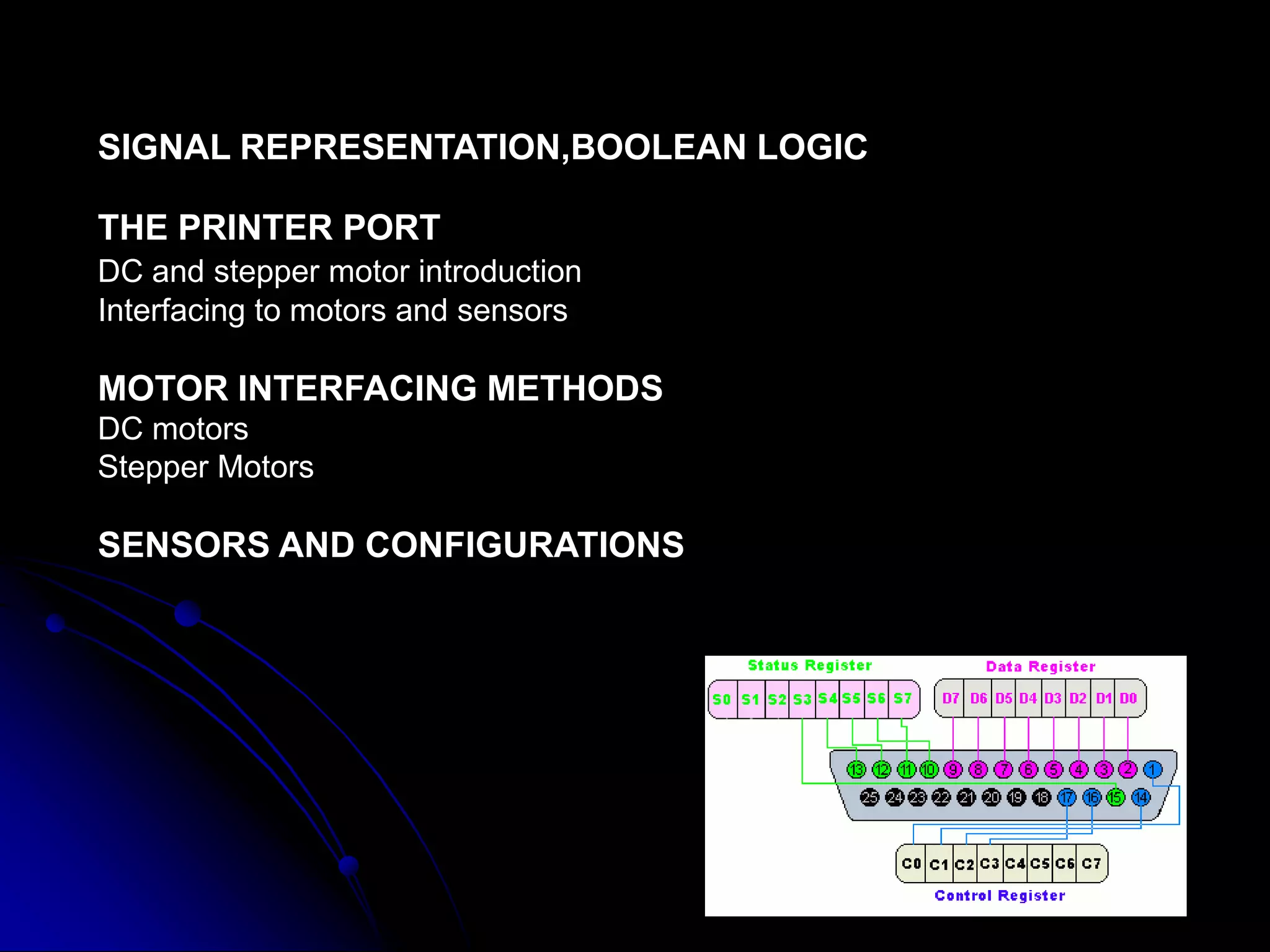
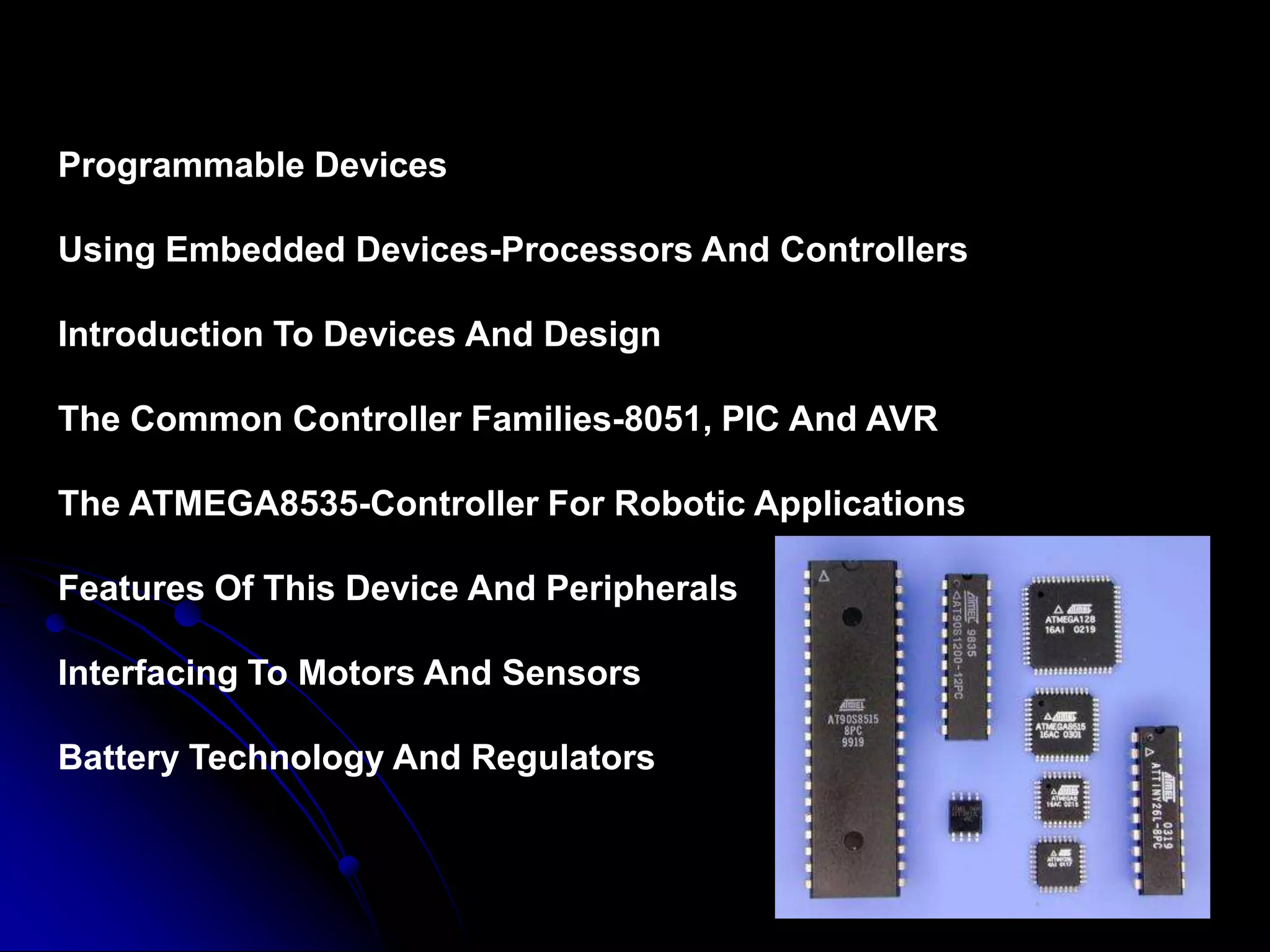

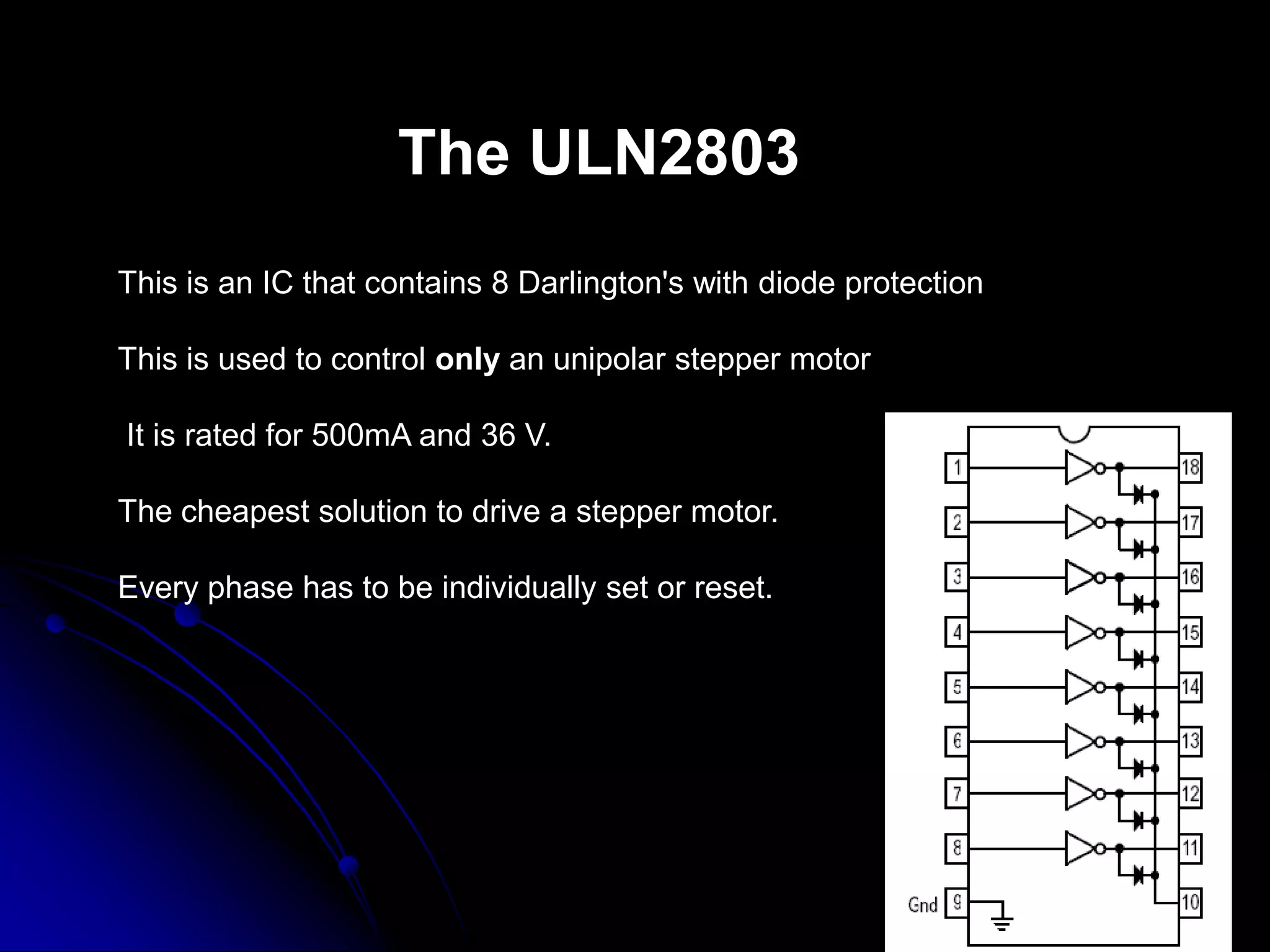
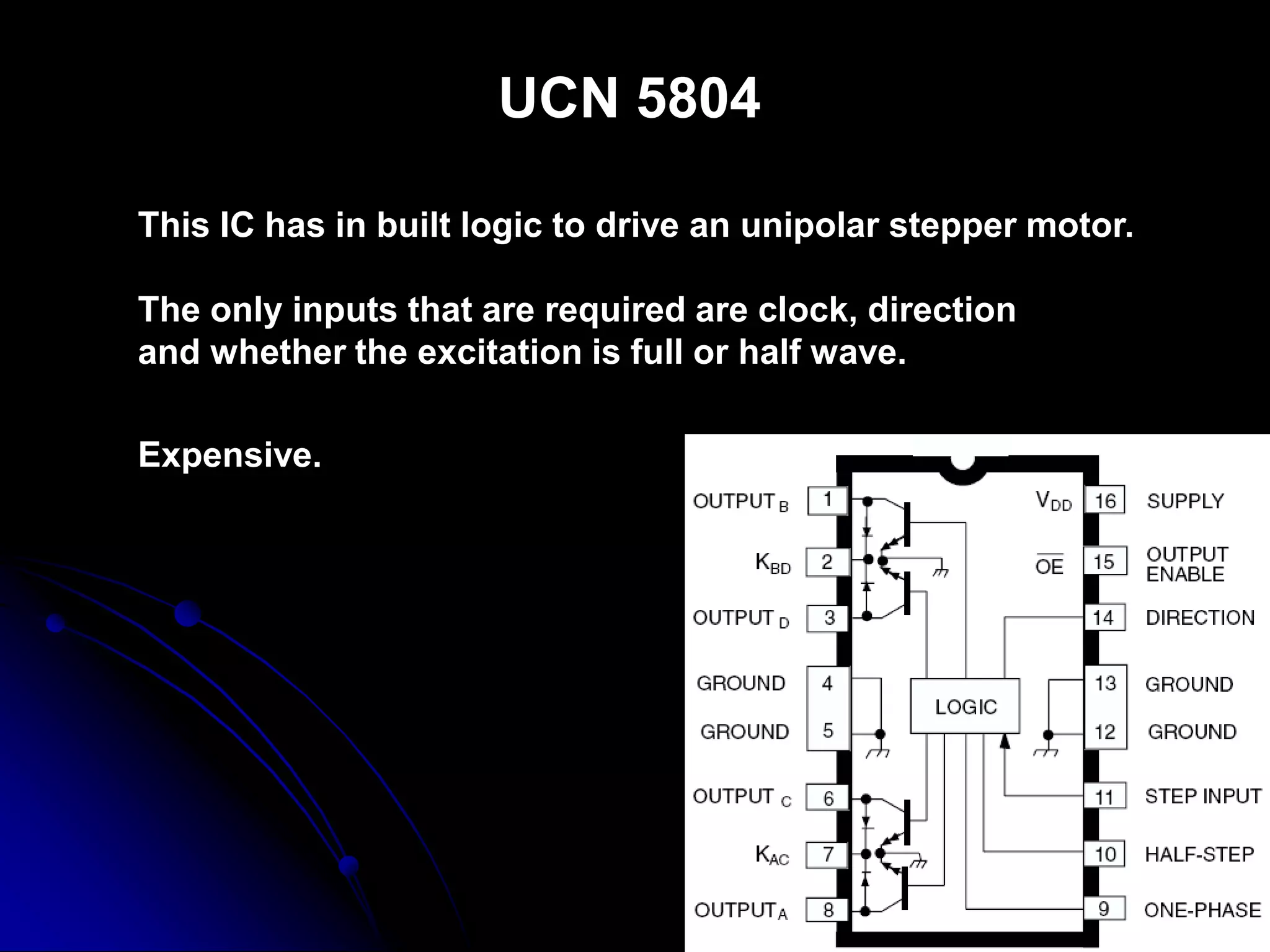
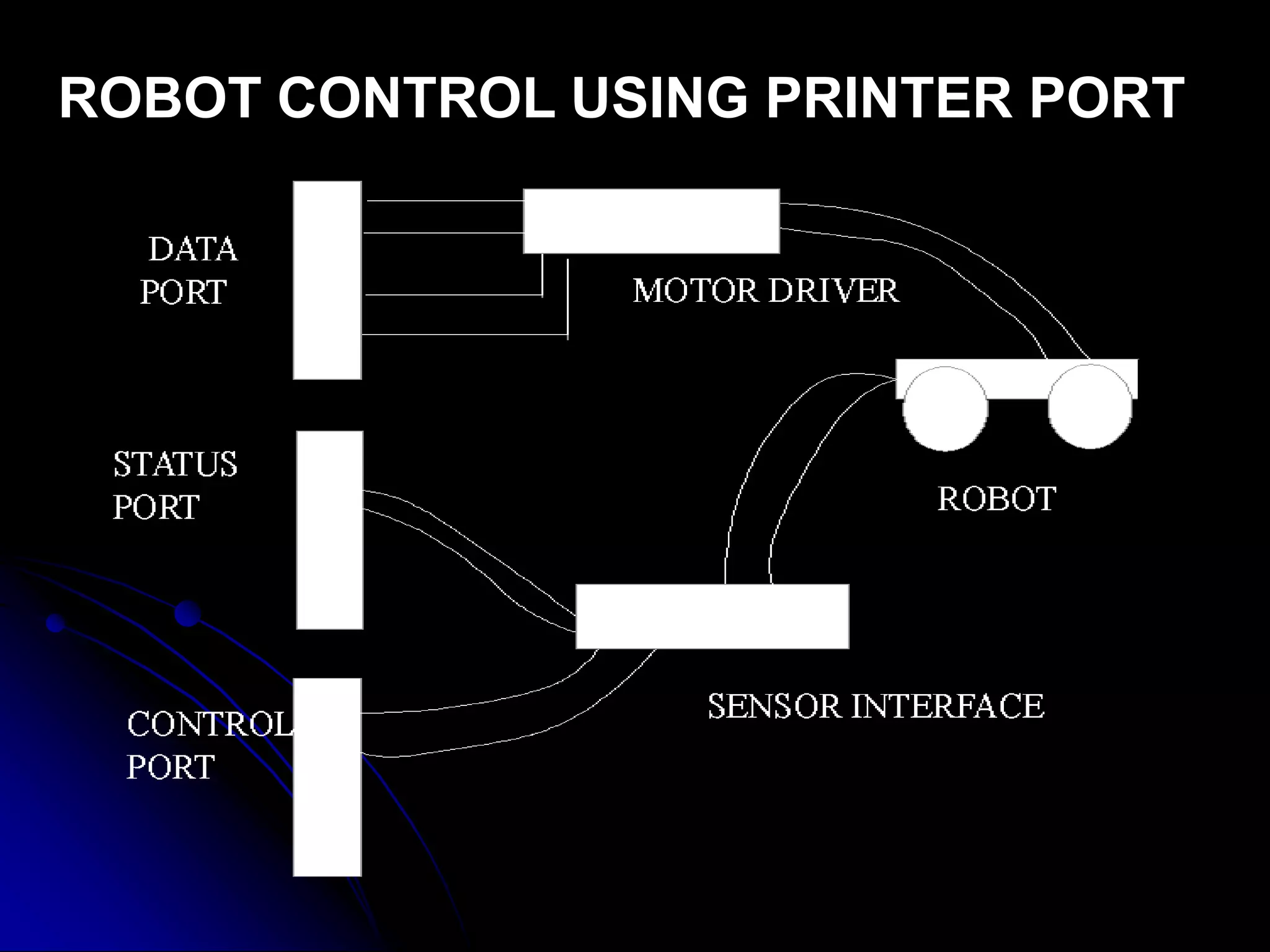

The document discusses various topics related to robotics including the Three Laws of Robotics, autonomous robots, robot chassis design, actuators like motors and wheels, materials for building robots, microcontrollers, battery technology, and voltage regulators. It provides information on different motor and sensor interfacing methods as well as programming microcontrollers to control robots.










































































