Downloaded 791 times


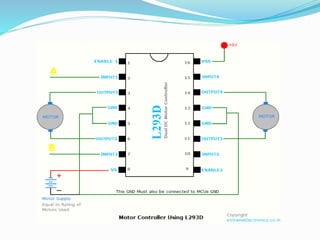



This document presents a new autonomous cleaning robot designed to assist in household cleaning tasks, detailing its electrical, software, and mechanical subsystems. The robot employs a microcontroller and sensors for obstacle detection, allowing it to navigate efficiently while performing cleaning tasks. Future developments aim to enhance the robot's intelligence to recognize and remember the layout of rooms, improving its cleaning capabilities.




























![ppt mini 1[1].pptxsddwsdssdsdsdsddssdssdsdd](https://cdn.slidesharecdn.com/ss_thumbnails/pptmini11-250815141227-c4368069-thumbnail.jpg?width=640&height=640&fit=bounds)





































