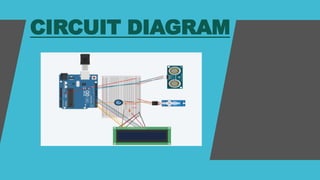
This document outlines a project on creating a radar simulation using an Arduino and an ultrasonic sensor to measure object distances. It describes the hardware components involved, the principles of ultrasonic distance measurement, and includes source code for the implementation. The project demonstrates practical applications of ultrasonic sensors in obstacle detection, quality control, and more.