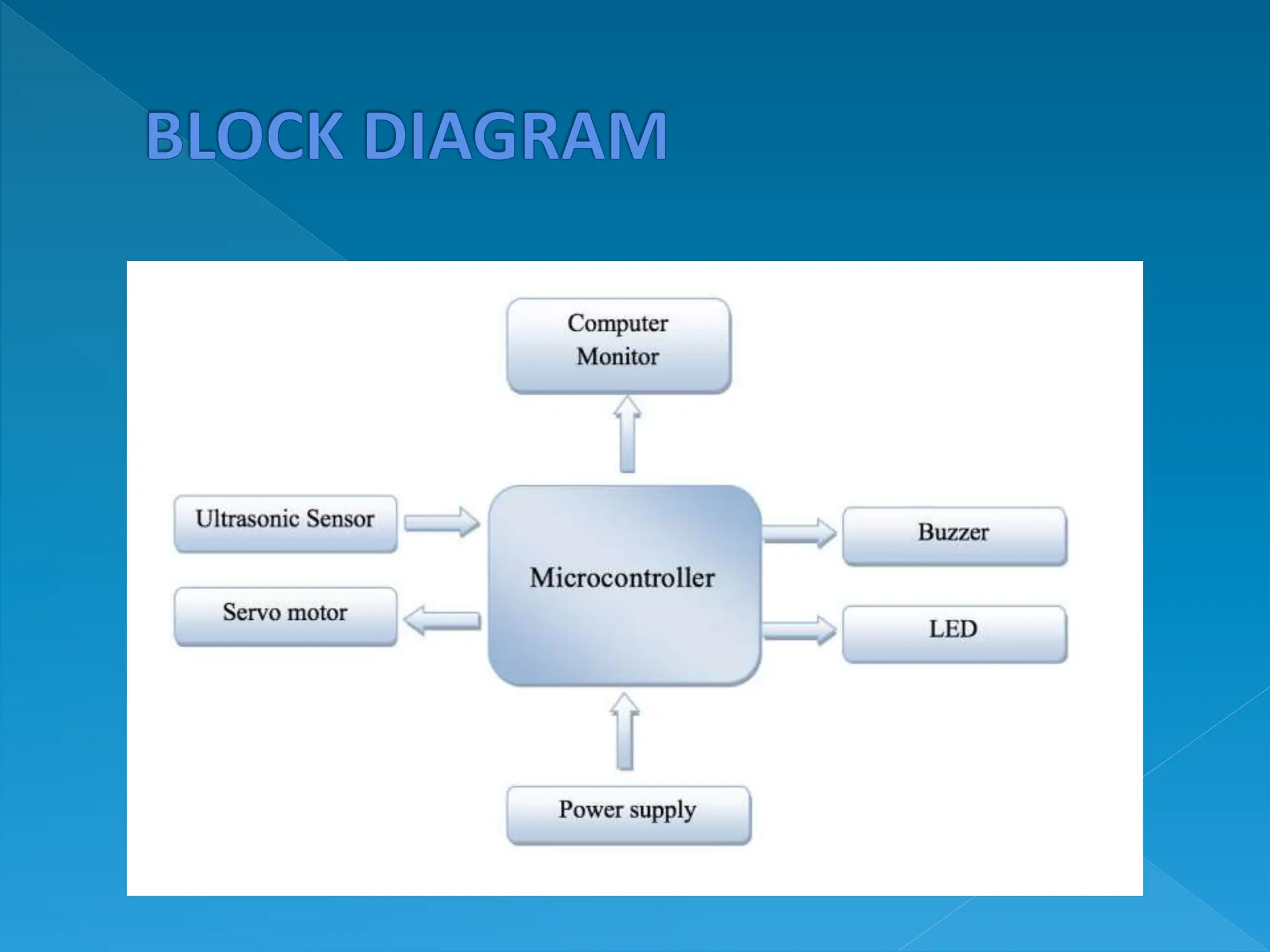
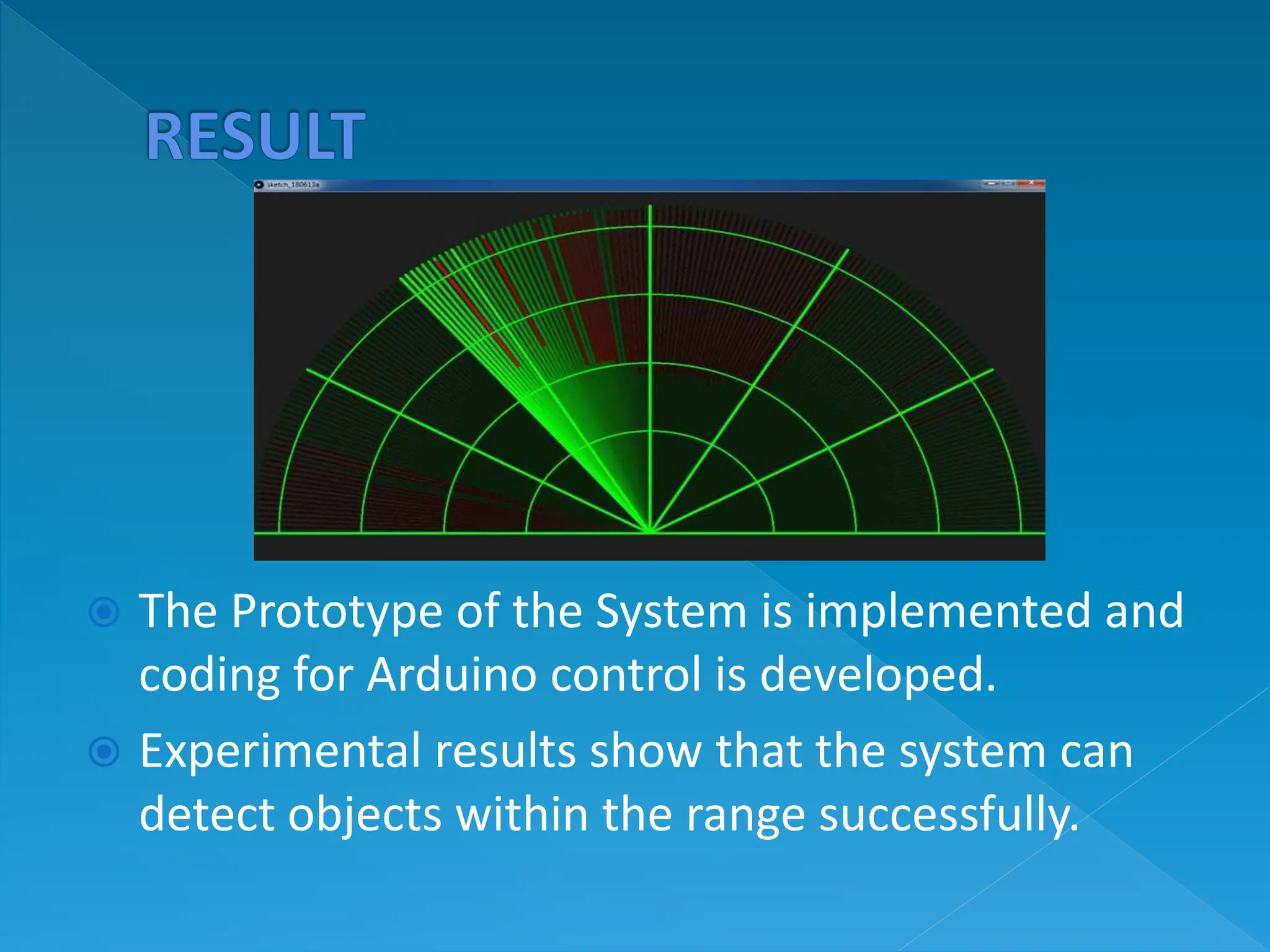
The document outlines the development of a low-cost ultrasonic radar system using Arduino that detects objects up to 400 cm away and displays their position visually. The system integrates ultrasonic sensors, a microcontroller, and a graphical display for alarms, with a rotation range of 0 to 150 degrees. Experimental results indicate successful object detection, and potential future enhancements may increase range and capabilities.