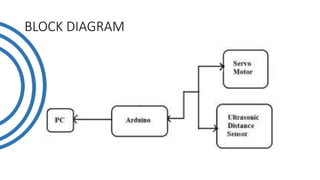
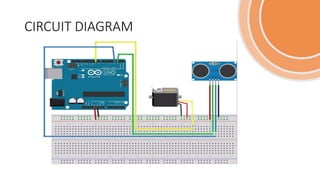
This document describes a radar system project using an ultrasonic sensor. It contains sections on the components, block diagram, circuit diagram, working principle, and applications. The system uses an Arduino, ultrasonic sensor, and servo motor to detect objects and determine their distance, position, and angle. It improves on earlier designs by powering components from the microcontroller and displaying output with polar coordinates. The document discusses how radar technology detects objects like aircraft and its uses in applications such as air traffic control and defense systems.