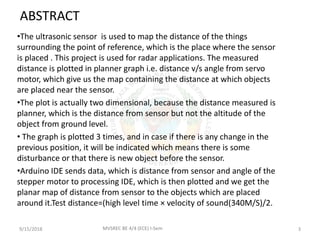
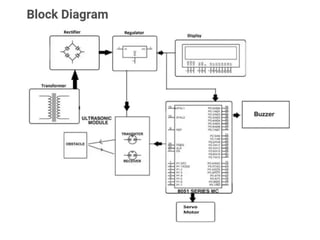
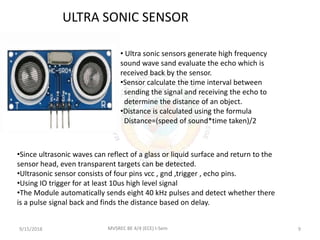
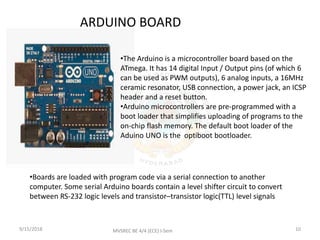
The document summarizes an ultrasonic radar project presented by students. It includes an introduction to radar technology and ultrasonic sensors. It describes the components used - an Arduino board, ultrasonic sensor, and servo motor. It explains how ultrasonic pulses detect distance and the servo motor rotates the sensor to map surroundings. Distances are plotted on a graph using Processing IDE to simulate radar detection of objects. Potential applications of radar technology are discussed like air traffic control and security systems.