ABSTRACT:
• We designeda radar system that uses an ultrasonic sensor to detect objects. The ultrasonic
sensor is used to measure the distance between the radar and any object - based non – contact
technology. Whereas , the movement of the sensor is controlled by using a servo motor. The signal
received from the sensor would be processed using “Processing Development Environment
Software ” then the result would be shown on a pc screen.
4.
INTRODUCTION:
• The termRADAR wad coined in 1940 by the united states Navy as an acronym
for "Radio Detection And Ranging".
• Radar is an object detection system that uses radio waves to determine the range
angle or velocity of objects.
• It can be used to detect ships,aircrafts,space crafts guided missiles, motor vehicles,
etc.
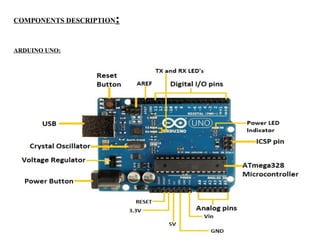
ARDUINO UNO:
• ArduinoUNO is based on an ATmega328P microcontroller.
• Atmega - which is a product of ATmel.
• 32 - represents it’s flash memory capacity i.e 32KB. 8 - represents it’s cpu type that is of 8 bit.
• p - simply denotes that it needs less power to work than it earlier version.
• The Arduino UNO includes as 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog
inputs, a 16 MHz ceramic resonator, a USB connection, a power jack, an ICSP header and a reset button.
SERVO MOTOR:
• Servomotors or “servos”, as they are known, are electronic devices and rotary or linear
actuators that rotate and push parts of a machine with precision.
• Servos are mainly used on angular or linear position and for specific velocity, and
acceleration.
Specifications:.
1. Weight.:9g
2. Dimension:22.2×11.8×31mm approx
3. Operating Speed:0.1s/60 degree
4. Operating voltage:4.8V
ULTRASONIC SENSOR [HC-SR04]:
•It is an electronic device that measures the distance of a target object by emitting ultrasonic sound waves.
• Components having:
1.VCC-Connects to 5power supply
2.TRIG-pulse is sent for the sensor
3.ECHO - The Echo sends a signal back if any object
4.GND-Completes electric path way of the power.
5.Transmitter- which emits the sound
6.Receiver- which encounters the sound
• The distance between the sensor and the object is calculated by
D = ½ T x C
11.
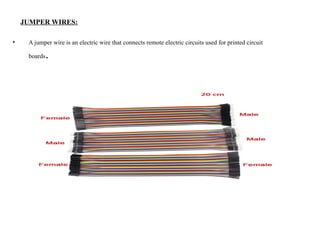
JUMPER WIRES:
• Ajumper wire is an electric wire that connects remote electric circuits used for printed circuit
boards.
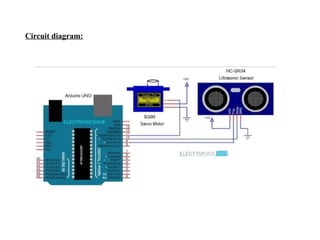
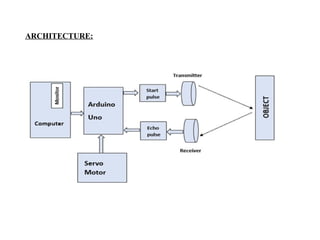
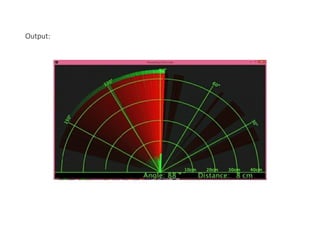
WORKING PRINCIPLE:
Ultrasonic sensorsends the ultrasonic wave in different directions by rotating with
help of servo motor. This wave travels in air and gets reflected back after striking
some object. This wave is again sensed by the sensor and its characteristics is
analyzed and output is displayed in screen showing parameters such as distance
and position of object. Arduino IDE is used to upload coding in Arduino and
helps us to sense position of servo motor and posting it to the serial port .The
output of sensor is displayed with the help of processing software to give final
output in display screen
ADVANTAGES:
1.It can workin any adverse conditions
2. It has higher sensing distance
3.The ultrasonic sensor has high frequency
4.The ultrasonic sensor has high sensitivity, high penetrating power
5.These sensors have greater accuracy power
17.
LIMITATIONS:-
• It cannot distinguish and resolve multiple targets which are very close like our eye.
• It can not recognize color of the targets.
• It can not see targets which are in the water and are too deep.
CONCLUSION:
• In today'sworld as the advancement in technology is increasing the miss use of it also growing.
• For example consider an unauthorized entry of a vehicle in to another nation or launching missiles
attack secret secretly which might pose a great to the people in that nation.
• So, all these problems are reduced with radars.



![ULTRASONIC SENSOR[ HC-SR04]:](https://image.slidesharecdn.com/batch7ultrasonicrader-250518173224-dd506b0d/85/batch-7-ultra-sonic-rader-Project-pptx-9-320.jpg)
![ULTRASONIC SENSOR [HC-SR04]:
• It is an electronic device that measures the distance of a target object by emitting ultrasonic sound waves.
• Components having:
1.VCC-Connects to 5power supply
2.TRIG-pulse is sent for the sensor
3.ECHO - The Echo sends a signal back if any object
4.GND-Completes electric path way of the power.
5.Transmitter- which emits the sound
6.Receiver- which encounters the sound
• The distance between the sensor and the object is calculated by
D = ½ T x C](https://image.slidesharecdn.com/batch7ultrasonicrader-250518173224-dd506b0d/85/batch-7-ultra-sonic-rader-Project-pptx-10-320.jpg)