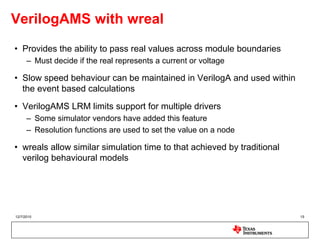
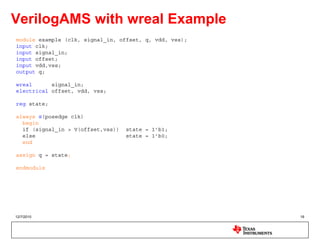
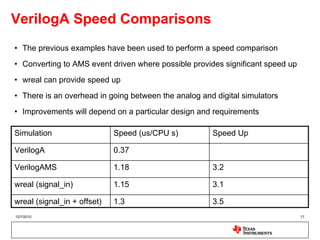
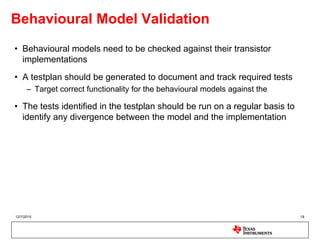
VerilogA provides an environment for mixed-signal behavioral modeling but simulations can be slow. VerilogAMS and using "wreal" values allows combining event-driven and analog modeling for improved speed. Behavioral models must be validated against transistor implementations through regular testing outlined in a testplan to ensure models match the design over time.








![[DCG 25] Александр Большев - Never Trust Your Inputs or How To Fool an ADC](https://cdn.slidesharecdn.com/ss_thumbnails/presentationdefconrussia-160406215741-thumbnail.jpg?width=640&height=640&fit=bounds)