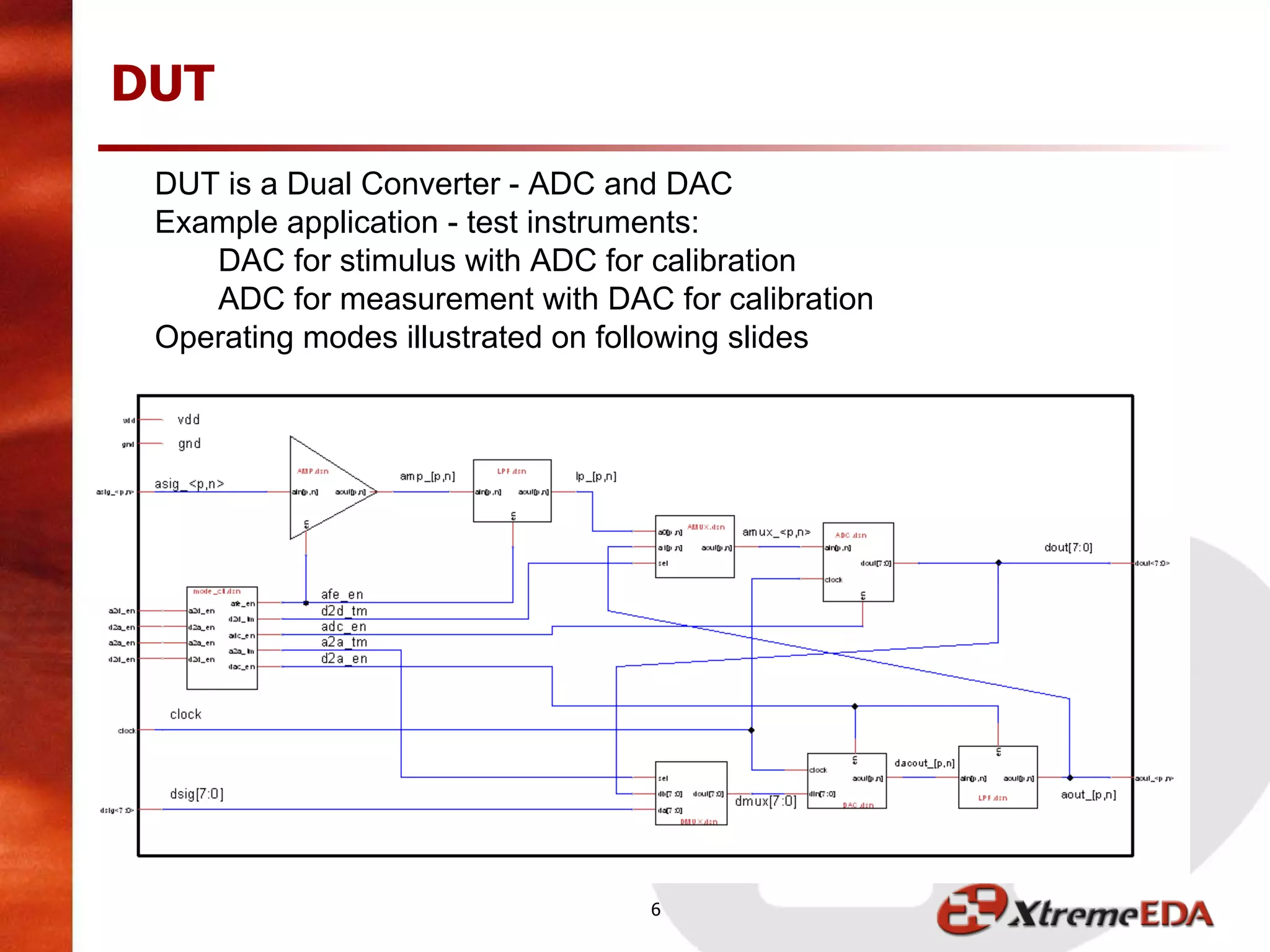
This presentation demonstrates how to use UVM for verification of mixed-signal circuits. It shows how to model analog signals using real-number models and transactions. The DUT is a dual converter with ADC and DAC that is verified using both directed and UVM-based approaches. The UVM environment uses analog drivers and monitors that handle real-number transactions to stimulate and monitor the DUT. The scoreboard evaluates the results against expectations. The presentation provides examples of UVM components like drivers, monitors, and coverage models adapted for mixed-signal verification.












![class analog_driver #(parameter real PTby2asclk = 1, real tscale = 1) extends uvm_driver #(analog_drv_seq_item);
`uvm_component_param_utils(analog_driver #(PTby2asclk,tscale))
<removed code>
task run_phase(uvm_phase phase);
analog_drv_seq_item seq_item;
real temp_val;
forever begin
seq_item_port.get_next_item(seq_item);
for (int jj=0; jj < (seq_item.lifetime*(tscale/PTby2asclk*1e6)); jj++) begin
temp_val = 0.0;
for (int ii=0; ii < seq_item.num_components; ii++) begin
temp_val += seq_item.amplitude[ii] * $sin(2 * `PI * seq_item.frequency[ii] * $realtime *tscale + seq_item.phase[ii]);
end // for
m_analog_if.driver_mp.analog_p = seq_item.vcm + seq_item.offset + temp_val;
m_analog_if.driver_mp.analog_n = seq_item.vcm + seq_item.offset - temp_val;
#(PTby2asclk/tscale);
end // for
seq_item_port.item_done();
end // forever
endtask : run_phase
endclass : analog_driver
UVM Analog Driver Code
26](https://image.slidesharecdn.com/e6397795-87ce-4780-bfdd-1a87e330e005-160617000158/75/MixedSignal-UVM-Demo-CDNLive-26-2048.jpg)