Downloaded 887 times
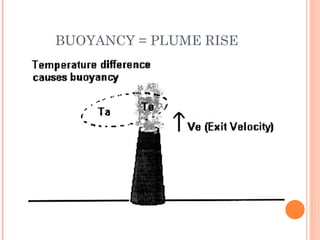
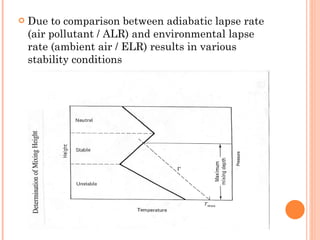
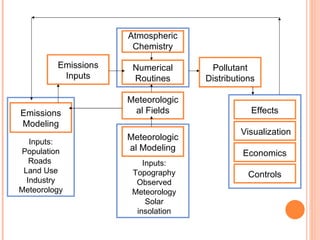
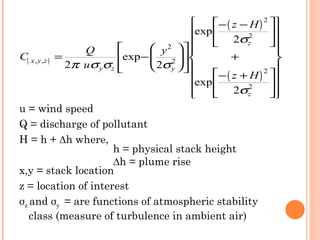
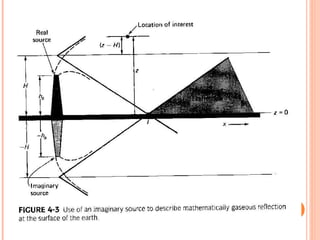
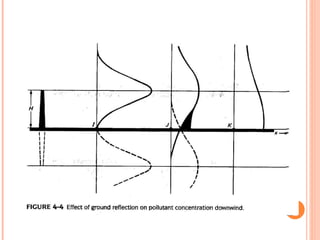
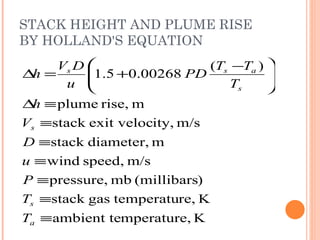
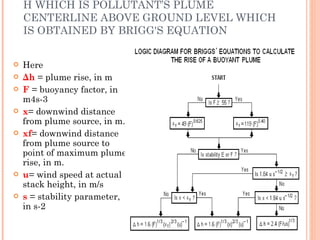
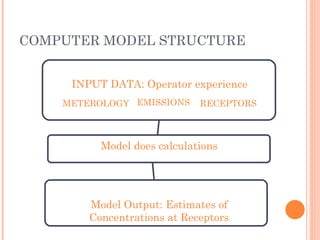

The document discusses various air pollution dispersion and modeling techniques using computers. It describes how pollutants move through mass, momentum and heat transfer processes. It then explains the basics of different modeling approaches like box models, Gaussian plume models and Eulerian/Lagrangian models. Key assumptions and equations for calculating plume rise and dispersion using Gaussian models are provided. Input requirements and structure of typical air pollution dispersion models are also summarized.














































































