Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
TY
Uploaded by
Takashi Yoshinaga
861 views
第19回SOIL水曜セミナー:RGB-DカメラでAR空間に入り込もう
Kinectで取得したPoint Cloudを使ったARコンテンツ作成ハンズオンの資料
Technology
◦
Read more
2
Save
Share
Embed
Embed presentation
1
/ 55
2
/ 55
3
/ 55
4
/ 55
5
/ 55
6
/ 55
7
/ 55
8
/ 55
9
/ 55
10
/ 55
11
/ 55
12
/ 55
13
/ 55
14
/ 55
15
/ 55
16
/ 55
17
/ 55
18
/ 55
19
/ 55
20
/ 55
21
/ 55
22
/ 55
23
/ 55
24
/ 55
25
/ 55
26
/ 55
27
/ 55
28
/ 55
29
/ 55
30
/ 55
31
/ 55
32
/ 55
33
/ 55
34
/ 55
35
/ 55
36
/ 55
37
/ 55
38
/ 55
39
/ 55
40
/ 55
41
/ 55
42
/ 55
43
/ 55
44
/ 55
45
/ 55
46
/ 55
47
/ 55
48
/ 55
49
/ 55
50
/ 55
51
/ 55
52
/ 55
53
/ 55
54
/ 55
55
/ 55
More Related Content
PDF
KinectでAR空間に入り込もう
by
Takashi Yoshinaga
PDF
はじめようArcore (修正版)
by
Takashi Yoshinaga
PDF
【Unite 2018 Tokyo】AndroidでAR〜ARCoreの導入から応用、使う上での勘所まで
by
UnityTechnologiesJapan002
PDF
はじめようARCore in 札幌
by
Takashi Yoshinaga
PDF
ARコンテンツ作成勉強会 in 宮崎: はじめようARCore
by
Takashi Yoshinaga
PDF
はじめようARCore
by
Takashi Yoshinaga
PDF
はじめようARCore: Motion Tracking & Image Tracking編
by
Takashi Yoshinaga
PDF
ARToolKitの紹介
by
yound_
KinectでAR空間に入り込もう
by
Takashi Yoshinaga
はじめようArcore (修正版)
by
Takashi Yoshinaga
【Unite 2018 Tokyo】AndroidでAR〜ARCoreの導入から応用、使う上での勘所まで
by
UnityTechnologiesJapan002
はじめようARCore in 札幌
by
Takashi Yoshinaga
ARコンテンツ作成勉強会 in 宮崎: はじめようARCore
by
Takashi Yoshinaga
はじめようARCore
by
Takashi Yoshinaga
はじめようARCore: Motion Tracking & Image Tracking編
by
Takashi Yoshinaga
ARToolKitの紹介
by
yound_
What's hot
PDF
OpenCV/ARCore/Unityで作る塗り絵AR
by
Takashi Yoshinaga
PDF
【出張ヒストリア2018】モーションキャプチャーを取り入れるには?
by
historia_Inc
PDF
機械学習向けCGデータの量産手法の検討
by
Silicon Studio Corporation
PDF
OSC2022 Online / Spring 「Linuxで活用するデジタルカメラと写真撮影術」
by
Masataka Kondo
PDF
OSC福岡 : 航空機写真撮影入門 in FUKUOKA
by
Masataka Kondo
PDF
OpenCVで作るスタンプAR
by
Takashi Yoshinaga
PPTX
20191128 近未来教育フォーラム2019公開版
by
GREE VR Studio Lab
PPT
没入度の高いARアプリケーション開発に向けた取り組み
by
Daiki Taniguchi
PPTX
デプスセンサとその応用
by
Norishige Fukushima
PDF
Unreal Studio+建築CADのワークフロー
by
エピック・ゲームズ・ジャパン Epic Games Japan
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
AROW の紹介 〜実践編〜
by
Drecom Co., Ltd.
PPTX
OpenCVでつくろうARスタンプアプリ in 熊本
by
Takashi Yoshinaga
PDF
VTuber・XRライブエンタメ駆動の研究開発 - GREE VR Studio Laboratory のR2D
by
gree_tech
PDF
AROW の紹介 〜概要編〜
by
Drecom Co., Ltd.
PDF
OpenCVとARCoreで作るスタンプAR in 宮崎
by
Takashi Yoshinaga
PPTX
#CCSE2019 GREE VR Studio Lab 「VTuber向け特殊表情コントローラの可能性と機械学習的アプローチ」(速公開版)
by
GREE VR Studio Lab
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PPTX
REALITY「なりたい自分で、生きていく」リアルタイムライブでVTuberが活躍する舞台を作る現場の1年
by
gree_tech
PDF
Unreal Engine 4 Education 3 シーケンサーでリアルタイム映像作成
by
エピック・ゲームズ・ジャパン Epic Games Japan
OpenCV/ARCore/Unityで作る塗り絵AR
by
Takashi Yoshinaga
【出張ヒストリア2018】モーションキャプチャーを取り入れるには?
by
historia_Inc
機械学習向けCGデータの量産手法の検討
by
Silicon Studio Corporation
OSC2022 Online / Spring 「Linuxで活用するデジタルカメラと写真撮影術」
by
Masataka Kondo
OSC福岡 : 航空機写真撮影入門 in FUKUOKA
by
Masataka Kondo
OpenCVで作るスタンプAR
by
Takashi Yoshinaga
20191128 近未来教育フォーラム2019公開版
by
GREE VR Studio Lab
没入度の高いARアプリケーション開発に向けた取り組み
by
Daiki Taniguchi
デプスセンサとその応用
by
Norishige Fukushima
Unreal Studio+建築CADのワークフロー
by
エピック・ゲームズ・ジャパン Epic Games Japan
オープンソース SLAM の分類
by
Yoshitaka HARA
AROW の紹介 〜実践編〜
by
Drecom Co., Ltd.
OpenCVでつくろうARスタンプアプリ in 熊本
by
Takashi Yoshinaga
VTuber・XRライブエンタメ駆動の研究開発 - GREE VR Studio Laboratory のR2D
by
gree_tech
AROW の紹介 〜概要編〜
by
Drecom Co., Ltd.
OpenCVとARCoreで作るスタンプAR in 宮崎
by
Takashi Yoshinaga
#CCSE2019 GREE VR Studio Lab 「VTuber向け特殊表情コントローラの可能性と機械学習的アプローチ」(速公開版)
by
GREE VR Studio Lab
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
REALITY「なりたい自分で、生きていく」リアルタイムライブでVTuberが活躍する舞台を作る現場の1年
by
gree_tech
Unreal Engine 4 Education 3 シーケンサーでリアルタイム映像作成
by
エピック・ゲームズ・ジャパン Epic Games Japan
Similar to 第19回SOIL水曜セミナー:RGB-DカメラでAR空間に入り込もう
PDF
OpenCVとRGB-Dセンサで作ろう壁面タッチパネル
by
Takashi Yoshinaga
PDF
Azure kinect DKハンズオン
by
Takashi Yoshinaga
PDF
はじめようRGB-Dセンシングと画像処理
by
Takashi Yoshinaga
PDF
はじめようARCore:自己位置推定・平面検出・FaceTracking
by
Takashi Yoshinaga
PPTX
ノンプログラミングで始めるAR (HoloLens 2 / ARCore / ARKit) 開発 with MRTK
by
Takashi Yoshinaga
PPTX
Kinect深度情報処理入門
by
伸男 伊藤
PDF
ももち浜TECHカフェ:OpenCVとKinectで作ろう壁面タッチパネル
by
Takashi Yoshinaga
PDF
Hands on
by
Keiji Kamebuchi
PDF
Mastering open cv kinectv1 marker based ar
by
Satoshi Fujimoto
PPTX
Structured Light 技術俯瞰
by
Teppei Kurita
PDF
第2回名古屋CV・PRML勉強会 「Kinectの導入」
by
Tsukasa Sugiura
PDF
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
PPTX
関西MSP勉強会~Kinect編~ ハンズオン資料 Kinectで身長を計測しよう!
by
Yasutomo Imairi
PPTX
Kinect Hacks for Dummies (Japanese / 日本語)
by
Tomoto Washio
PDF
FMCN Kinectハンズオン
by
Keizo Nagamine
PDF
three.js はじめましょ
by
Hiroaki Okubo
PDF
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
PDF
Unity meets Kinect -Unity で NUI を扱ってみた- / 2015.06.23 at TechBuzz Space
by
Mori Tetsuya
PDF
【DL輪読会】Monocular real time volumetric performance capture
by
Deep Learning JP
PDF
HoloLensハンズオン:AirTap & SpatialMapping編
by
Takashi Yoshinaga
OpenCVとRGB-Dセンサで作ろう壁面タッチパネル
by
Takashi Yoshinaga
Azure kinect DKハンズオン
by
Takashi Yoshinaga
はじめようRGB-Dセンシングと画像処理
by
Takashi Yoshinaga
はじめようARCore:自己位置推定・平面検出・FaceTracking
by
Takashi Yoshinaga
ノンプログラミングで始めるAR (HoloLens 2 / ARCore / ARKit) 開発 with MRTK
by
Takashi Yoshinaga
Kinect深度情報処理入門
by
伸男 伊藤
ももち浜TECHカフェ:OpenCVとKinectで作ろう壁面タッチパネル
by
Takashi Yoshinaga
Hands on
by
Keiji Kamebuchi
Mastering open cv kinectv1 marker based ar
by
Satoshi Fujimoto
Structured Light 技術俯瞰
by
Teppei Kurita
第2回名古屋CV・PRML勉強会 「Kinectの導入」
by
Tsukasa Sugiura
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
関西MSP勉強会~Kinect編~ ハンズオン資料 Kinectで身長を計測しよう!
by
Yasutomo Imairi
Kinect Hacks for Dummies (Japanese / 日本語)
by
Tomoto Washio
FMCN Kinectハンズオン
by
Keizo Nagamine
three.js はじめましょ
by
Hiroaki Okubo
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
Unity meets Kinect -Unity で NUI を扱ってみた- / 2015.06.23 at TechBuzz Space
by
Mori Tetsuya
【DL輪読会】Monocular real time volumetric performance capture
by
Deep Learning JP
HoloLensハンズオン:AirTap & SpatialMapping編
by
Takashi Yoshinaga
More from Takashi Yoshinaga
PPTX
HoloLens2とMeta QuestではじめるWebXR
by
Takashi Yoshinaga
PPTX
【準備編】OculusQuest/HoloLens2対応WebXR開発
by
Takashi Yoshinaga
PPTX
ARコンテンツ作成勉強会( #AR_Fukuoka )紹介
by
Takashi Yoshinaga
PPTX
AI x WebAR: MediaPipeのハンドトラッキングを使ってみよう
by
Takashi Yoshinaga
PPTX
iPad LiDARで エンジニアカフェを3Dスキャン
by
Takashi Yoshinaga
PPTX
AI x OpenCV x WebAR: Selfie Segmentationを使ってみよう
by
Takashi Yoshinaga
PPTX
Web技術ではじめようAR/VRアプリ開発
by
Takashi Yoshinaga
PPTX
MRTKをNreal Lightに対応させてみた
by
Takashi Yoshinaga
PPTX
Nreal Lightハンズオン
by
Takashi Yoshinaga
PPTX
【準備編!】HoloLens 2/Oculus Quest対応WebXRハンズオン
by
Takashi Yoshinaga
PPTX
A-Frameで始めるWebXRとハンドトラッキング (HoloLens2/Oculus Quest対応)
by
Takashi Yoshinaga
PPTX
Holo-SDKハンズオン:はじめようヘッドトラッキングを用いた3D表現
by
Takashi Yoshinaga
PPTX
FUKUOKA Engineers Day 2021 発表資料:AR Fukuoka & HoloBox紹介
by
Takashi Yoshinaga
PPTX
Voxon Photonics VX1 で遊んでみた
by
Takashi Yoshinaga
PPTX
AR-Frame x AR.js入門
by
Takashi Yoshinaga
PPTX
AI x WebXR: フェイストラッキングを用いた擬似3D表現を解説!
by
Takashi Yoshinaga
PPTX
コロナ禍中のコミュニティ活動
by
Takashi Yoshinaga
PPTX
Project HoloBox
by
Takashi Yoshinaga
PPTX
AR Fukuoka紹介2020
by
Takashi Yoshinaga
PPTX
iPad LiDARで作ってみた in AR Fukuoka 忘年会2020
by
Takashi Yoshinaga
HoloLens2とMeta QuestではじめるWebXR
by
Takashi Yoshinaga
【準備編】OculusQuest/HoloLens2対応WebXR開発
by
Takashi Yoshinaga
ARコンテンツ作成勉強会( #AR_Fukuoka )紹介
by
Takashi Yoshinaga
AI x WebAR: MediaPipeのハンドトラッキングを使ってみよう
by
Takashi Yoshinaga
iPad LiDARで エンジニアカフェを3Dスキャン
by
Takashi Yoshinaga
AI x OpenCV x WebAR: Selfie Segmentationを使ってみよう
by
Takashi Yoshinaga
Web技術ではじめようAR/VRアプリ開発
by
Takashi Yoshinaga
MRTKをNreal Lightに対応させてみた
by
Takashi Yoshinaga
Nreal Lightハンズオン
by
Takashi Yoshinaga
【準備編!】HoloLens 2/Oculus Quest対応WebXRハンズオン
by
Takashi Yoshinaga
A-Frameで始めるWebXRとハンドトラッキング (HoloLens2/Oculus Quest対応)
by
Takashi Yoshinaga
Holo-SDKハンズオン:はじめようヘッドトラッキングを用いた3D表現
by
Takashi Yoshinaga
FUKUOKA Engineers Day 2021 発表資料:AR Fukuoka & HoloBox紹介
by
Takashi Yoshinaga
Voxon Photonics VX1 で遊んでみた
by
Takashi Yoshinaga
AR-Frame x AR.js入門
by
Takashi Yoshinaga
AI x WebXR: フェイストラッキングを用いた擬似3D表現を解説!
by
Takashi Yoshinaga
コロナ禍中のコミュニティ活動
by
Takashi Yoshinaga
Project HoloBox
by
Takashi Yoshinaga
AR Fukuoka紹介2020
by
Takashi Yoshinaga
iPad LiDARで作ってみた in AR Fukuoka 忘年会2020
by
Takashi Yoshinaga
第19回SOIL水曜セミナー:RGB-DカメラでAR空間に入り込もう
1.
第19回SOIL水曜セミナー RGB-DカメラでAR空間に入り込もう
2.
自己紹介 氏名:吉永崇(Takashi Yoshinaga) 所属:九州先端科学技術研究所(ISIT) 専門:AR/VRを用いた情報可視化と各種計測 コミュニティ:ARコンテンツ作成勉強会 主催
3.
ARコンテンツ作成勉強会の紹介 2013年5月に勉強会をスタート ARコンテンツの作り方をハンズオン形式で学ぶ
人数は5~10名程度の少人数で実施 参加条件はAR/VRに興味がある人(知識不要) 各地で開催 (福岡、熊本、宮崎、長崎、大分、 鹿児島、山口、広島、関東)
4.
Twitterと勉強会ページで情報を発信しています #AR_Fukuoka Googleで「AR勉強会」で検索
5.
SRP Open Innovation
Lab主催 SOIL水曜セミナー 今回のイベントについて 登録よろしく! https://soil.connpass.com/
6.
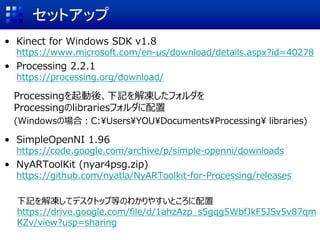
セットアップ • Kinect for
Windows SDK v1.8 https://www.microsoft.com/en-us/download/details.aspx?id=40278 • Processing 2.2.1 https://processing.org/download/ Processingを起動後、下記を解凍したフォルダを Processingのlibrariesフォルダに配置 (Windowsの場合:C:¥Users¥YOU¥Documents¥Processing¥ libraries) • SimpleOpenNI 1.96 https://code.google.com/archive/p/simple-openni/downloads • NyARToolKit (nyar4psg.zip) https://github.com/nyatla/NyARToolkit-for-Processing/releases 下記を解凍してデスクトップ等のわかりやすいところに配置 https://drive.google.com/file/d/1ahzAzp_s5gqg5WbfJkF5JSv5v87qm KZv/view?usp=sharing
7.
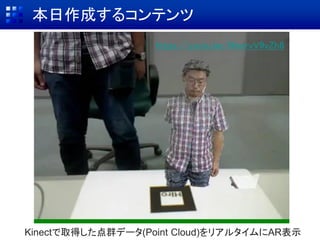
本日作成するコンテンツ Kinectで取得した点群データ(Point Cloud)をリアルタイムにAR表示 https://youtu.be/WeorvV9vZh8
8.
Kinectとは Kinect(キネクト)とはMicrosoft社のゲーム機、XBOX360 専用のジェスチャー入力コントローラとして発売された機器 カラー画像・深度(Depth)情報・身体の認識等が可能 深度センサ(赤外線プロジェクタ+赤外線カメラ) カラーカメラ
9.
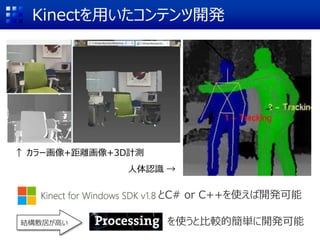
Kinectを用いたコンテンツ開発 ↑ カラー画像+距離画像+3D計測 人体認識 → とC#
or C++を使えば開発可能 結構敷居が高い を使うと比較的簡単に開発可能
10.
processingとは processingとは、電子アートとビジュアルデザインのための プログラミング言語であり、統合開発環境 視覚的な表示を簡単に行えるため初心者のプログラミング 学習にも向いている。文法はJavaとほぼ同じ。
11.
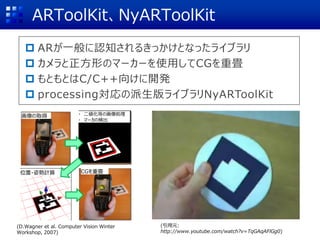
ARToolKit、NyARToolKit ARが一般に認知されるきっかけとなったライブラリ カメラと正方形のマーカーを使用してCGを重畳
もともとはC/C++向けに開発 processing対応の派生版ライブラリNyARToolKit 画像の取得 ・ 二値化等の画像処理 ・ マーカの検出 位置・姿勢計算 CGを重畳 (引用元: http://www.youtube.com/watch?v=TqGAqAFlGg0) (D.Wagner et al. Computer Vision Winter Workshop, 2007)
12.
準備 KinectとPCを接続しておきましょう
13.
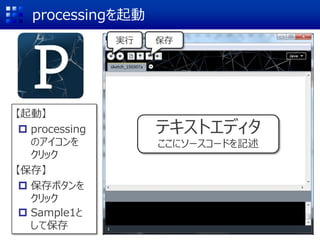
processingを起動 実行 テキストエディタ ここにソースコードを記述 保存 【起動】 processing のアイコンを クリック 【保存】 保存ボタンを クリック
Sample1と して保存
14.
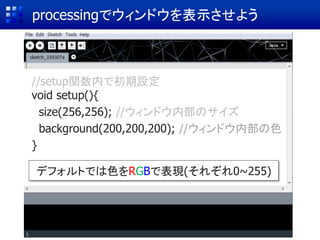
processingでウィンドウを表示させよう //setup関数内で初期設定 void setup(){ size(256,256); //ウィンドウ内部のサイズ background(200,200,200);
//ウィンドウ内部の色 } デフォルトでは色をRGBで表現(それぞれ0~255)
15.
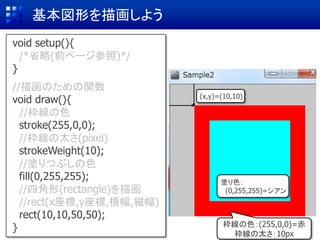
基本図形を描画しよう void setup(){ /*省略(前ページ参照)*/ } //描画のための関数 void draw(){ //枠線の色 stroke(255,0,0); //枠線の太さ(pixel) strokeWeight(10); //塗りつぶしの色 fill(0,255,255); //四角形(rectangle)を描画 //rect(x座標,y座標,横幅,縦幅) rect(10,10,50,50); } (x,y)=(10,10) 枠線の色:(255,0,0)=赤 枠線の太さ:10px 塗り色: (0,255,255)=シアン
16.
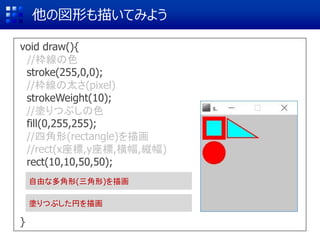
他の図形も描いてみよう void draw(){ //枠線の色 stroke(255,0,0); //枠線の太さ(pixel) strokeWeight(10); //塗りつぶしの色 fill(0,255,255); //四角形(rectangle)を描画 //rect(x座標,y座標,横幅,縦幅) rect(10,10,50,50); } 塗りつぶした円を描画 自由な多角形(三角形)を描画
17.
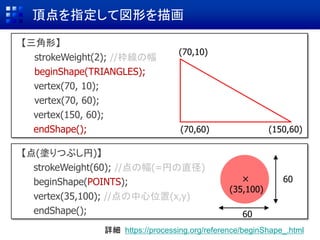
頂点を指定して図形を描画 【三角形】 strokeWeight(2); //枠線の幅 beginShape(TRIANGLES); vertex(70, 10); vertex(70,
60); vertex(150, 60); endShape(); (70,10) (70,60) (150,60) 【点(塗りつぶし円)】 strokeWeight(60); //点の幅(=円の直径) beginShape(POINTS); vertex(35,100); //点の中心位置(x,y) endShape(); 60 60 (35,100) 詳細 https://processing.org/reference/beginShape_.html
18.
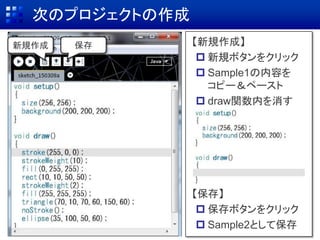
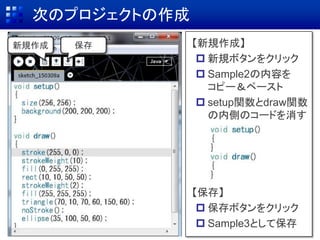
次のプロジェクトの作成 保存新規作成 【新規作成】 新規ボタンをクリック
Sample1の内容を コピー&ペースト draw関数内を消す 【保存】 保存ボタンをクリック Sample2として保存
19.
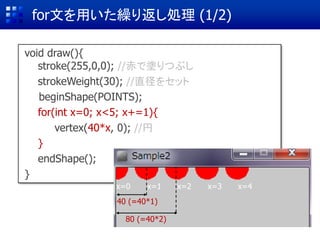
void draw(){ stroke(255,0,0); //赤で塗りつぶし strokeWeight(30);
//直径をセット beginShape(POINTS); for(int x=0; x<5; x+=1){ vertex(40*x, 0); //円 } endShape(); } for文を用いた繰り返し処理 (1/2) x=0 x=1 x=2 x=3 x=4 40 (=40*1) 80 (=40*2)
20.
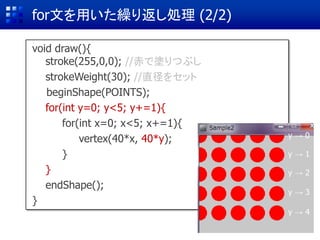
for文を用いた繰り返し処理 (2/2) void draw(){ stroke(255,0,0);
//赤で塗りつぶし strokeWeight(30); //直径をセット beginShape(POINTS); for(int y=0; y<5; y+=1){ for(int x=0; x<5; x+=1){ vertex(40*x, 0); //円 } } endShape(); } vertex(40*x, 40*y); y → 0 y → 1 y → 2 y → 3 y → 4
21.
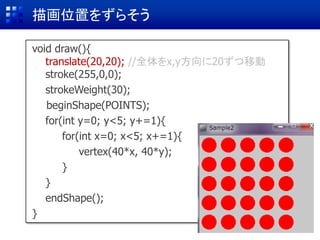
描画位置をずらそう void draw(){ translate(20,20); //全体をx,y方向に20ずつ移動 stroke(255,0,0); strokeWeight(30); beginShape(POINTS); for(int
y=0; y<5; y+=1){ for(int x=0; x<5; x+=1){ vertex(40*x, 40*y); } } endShape(); }
22.
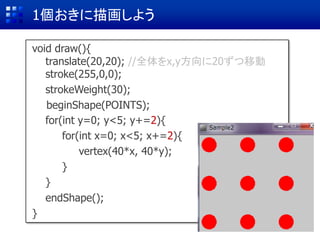
void draw(){ translate(20,20); //全体をx,y方向に20ずつ移動 stroke(255,0,0); strokeWeight(30); beginShape(POINTS); for(int
y=0; y<5; y+=1){ for(int x=0; x<5; x+=1){ vertex(40*x, 40*y); } } endShape(); } 1個おきに描画しよう for(int y=0; y<5; y+=1){ for(int x=0; x<5; x+=2){ vertex(40*x, 40*y); } } for(int y=0; y<5; y+=2){ for(int x=0; x<5; x+=2){ vertex(40*x, 40*y); } }
23.
次のプロジェクトの作成 保存新規作成 【新規作成】 新規ボタンをクリック
Sample2の内容を コピー&ペースト setup関数とdraw関数 の内側のコードを消す 【保存】 保存ボタンをクリック Sample3として保存
24.
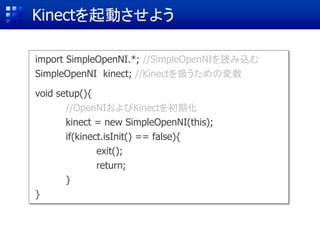
Kinectを起動させよう import SimpleOpenNI.*; //SimpleOpenNIを読み込む SimpleOpenNI
kinect; //Kinectを扱うための変数 void setup(){ //OpenNIおよびKinectを初期化 kinect = new SimpleOpenNI(this); if(kinect.isInit() == false){ exit(); return; } }
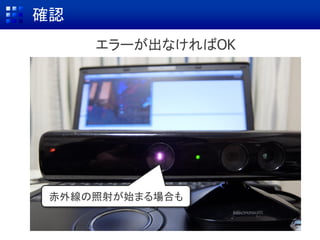
25.
確認 赤外線の照射が始まる場合も エラーが出なければOK
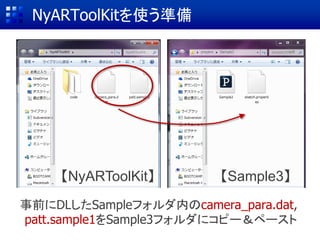
26.
NyARToolKitを使う準備 事前にDLしたSampleフォルダ内のcamera_para.dat, patt.sample1をSample3フォルダにコピー&ペースト 【NyARToolKit】 【Sample3】
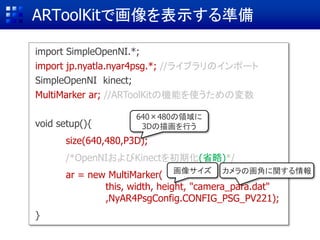
27.
ARToolKitで画像を表示する準備 import SimpleOpenNI.*; import jp.nyatla.nyar4psg.*;
//ライブラリのインポート SimpleOpenNI kinect; MultiMarker ar; //ARToolKitの機能を使うための変数 void setup(){ size(640,480,P3D); /*OpenNIおよびKinectを初期化(省略)*/ ar = new MultiMarker( this, width, height, "camera_para.dat" ,NyAR4PsgConfig.CONFIG_PSG_PV221); } 640×480の領域に 3Dの描画を行う カメラの画角に関する情報画像サイズ
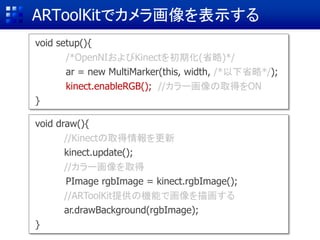
28.
ARToolKitでカメラ画像を表示する void draw(){ //Kinectの取得情報を更新 kinect.update(); //カラー画像を取得 PImage rgbImage
= kinect.rgbImage(); //ARToolKit提供の機能で画像を描画する ar.drawBackground(rgbImage); } void setup(){ /*OpenNIおよびKinectを初期化(省略)*/ ar = new MultiMarker(this, width, /*以下省略*/); kinect.enableRGB(); //カラー画像の取得をON }
29.
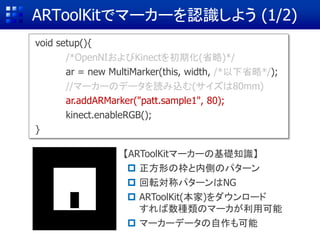
ARToolKitでマーカーを認識しよう (1/2) void setup(){ /*OpenNIおよびKinectを初期化(省略)*/ ar
= new MultiMarker(this, width, /*以下省略*/); //マーカーのデータを読み込む(サイズは80mm) ar.addARMarker("patt.sample1", 80); kinect.enableRGB(); } 【ARToolKitマーカーの基礎知識】 正方形の枠と内側のパターン 回転対称パターンはNG ARToolKit(本家)をダウンロード すれば数種類のマーカが利用可能 マーカーデータの自作も可能
30.
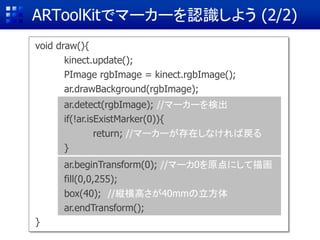
ARToolKitでマーカーを認識しよう (2/2) void draw(){ kinect.update(); PImage
rgbImage = kinect.rgbImage(); ar.drawBackground(rgbImage); } ar.detect(rgbImage); //マーカーを検出 if(!ar.isExistMarker(0)){ return; //マーカーが存在しなければ戻る } ar.beginTransform(0); //マーカ0を原点にして描画 fill(0,0,255); box(40); //縦横高さが40mmの立方体 ar.endTransform();
31.
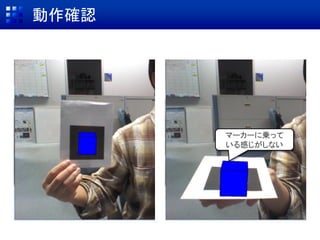
動作確認 マーカーに乗って いる感じがしない
32.
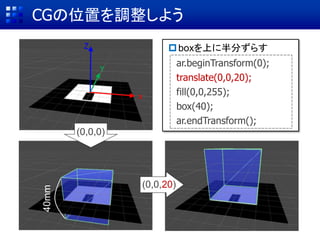
CGの位置を調整しよう ar.beginTransform(0); translate(0,0,20); fill(0,0,255); box(40); ar.endTransform(); boxを上に半分ずらす x Y Z (0,0,0) (0,0,20) 40mm
33.
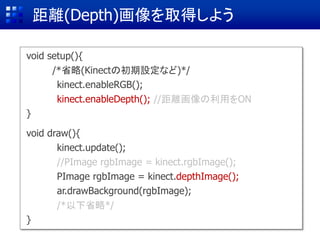
距離(Depth)画像を取得しよう void setup(){ /*省略(Kinectの初期設定など)*/ kinect.enableRGB(); kinect.enableDepth(); //距離画像の利用をON } void
draw(){ kinect.update(); //PImage rgbImage = kinect.rgbImage(); PImage rgbImage = kinect.depthImage(); ar.drawBackground(rgbImage); /*以下省略*/ }
34.
動作確認 次はこれを3次元化する Kinectからの距離に 応じた濃淡
35.
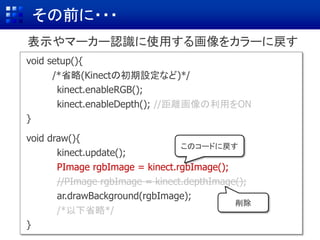
その前に・・・ void setup(){ /*省略(Kinectの初期設定など)*/ kinect.enableRGB(); kinect.enableDepth(); //距離画像の利用をON } void
draw(){ kinect.update(); PImage rgbImage = kinect.rgbImage(); //PImage rgbImage = kinect.depthImage(); ar.drawBackground(rgbImage); /*以下省略*/ } 表示やマーカー認識に使用する画像をカラーに戻す このコードに戻す 削除
36.
距離画像を3次元情報に変換 void draw(){ kinect.update(); PImage rgbImage
= kinect.rgbImage(); //縦横(pixel)とDepthの組をx,y,z座標(mm)に変換 //PVectorの一次元配列に全データを記録 PVector[] realWorld = kinect.depthMapRealWorld(); /*以下省略*/ pixelと濃淡 変換 実空間
37.
距離画像とrealWorldとの対応付け P00 (x,y,z) P01 (x,y,z) P02 (x,y,z) P10 (x,y,z) P11 (x,y,z) P12 (x,y,z) P20 (x,y,z) P21 (x,y,z) P23 (x,y,z) 【ポイント】 3次元座標は一次 元配列realWorld に格納されている 任意のu,vピクセル のx,y,zを知るには 計算が必要 P00
P01 P02 P10 P11 P12 P20 P21 P22 ・・・ 0 1 2 v 0 1 2 u realWorld [0] [1] [2] [3] [4] [5] [6] [7] [8] ・・・ v = 0 段目 v = 1 段目 v = 2 段目 ピクセルu,vでの3次元座標 → realWorld[v*画像の横幅 + u] 【距離画像】
38.
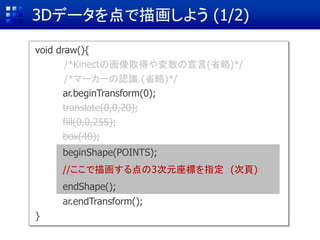
3Dデータを点で描画しよう (1/2) void draw(){ /*Kinectの画像取得や変数の宣言(省略)*/ /*マーカーの認識
(省略)*/ ar.beginTransform(0); // translate(0,0,20); fill(0,0,255); box(40); ar.endTransform(); } beginShape(POINTS); //ここで描画する点の3次元座標を指定 (次頁) endShape(); translate(0,0,20); fill(0,0,255); box(40);
39.
3Dデータを描画しよう (2/2) beginShape(POINTS); endShape(); //v:縦, u:横、それぞれ4pixelおきに3次元座標を取得 for(int
v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; stroke(255,255,0); //描画色(黄色) if(point.z>0) { vertex(point.x, point.y, point.z); } } } X Y Z 黒画素(z=0)は 描画したくない
40.
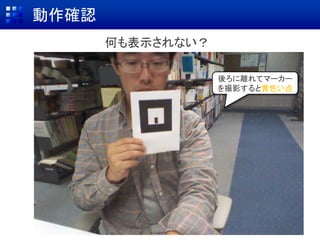
動作確認 何も表示されない? 後ろに離れてマーカー を撮影すると黄色い点
41.
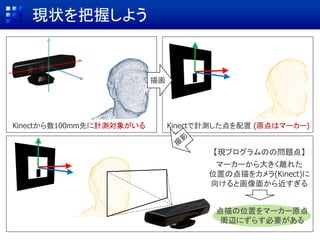
現状を把握しよう Kinectから数100mm先に計測対象がいる Kinectで計測した点を配置 (原点はマーカー) 【現プログラムのの問題点】 マーカーから大きく離れた 位置の点描をカメラ(Kinect)に 向けると画像面から近すぎる 点描の位置をマーカー原点 周辺にずらす必要がある 描画
42.
3Dデータを原点付近に移動させよう translate(0,0,-600); //600mm後ろに戻す (場合による) beginShape(POINTS); for(int
v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; stroke(255,255,0); //描画色 if(point.z>0) { vertex(point.x, point.y, point.z); } } } endShape(); X Y Z
43.
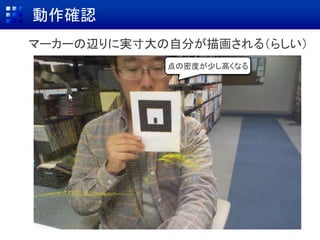
動作確認 点の密度が少し高くなる マーカーの辺りに実寸大の自分が描画される(らしい)
44.
3Dデータを手乗りサイズにしよう scale(0.3); //サイズを3/10にする translate(0,0,-600); beginShape(POINTS); for(int v=0;
v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; // stroke(255,255,0); //描画色 if(point.z>0) { vertex(point.x, point.y, point.z); } } }
45.
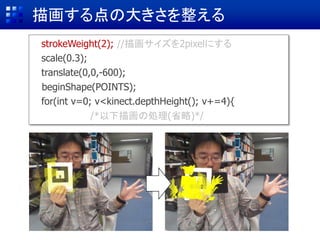
描画する点の大きさを整える strokeWeight(2); //描画サイズを2pixelにする scale(0.3); translate(0,0,-600); beginShape(POINTS); for(int v=0;
v<kinect.depthHeight(); v+=4){ /*以下描画の処理(省略)*/
46.
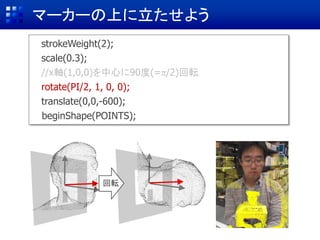
マーカーの上に立たせよう strokeWeight(2); scale(0.3); //x軸(1,0,0)を中心に90度(=π/2)回転 rotate(PI/2, 1, 0,
0); translate(0,0,-600); beginShape(POINTS); 回転
47.
背景のデータを除去:描画範囲の限定 beginShape(POINTS); for(int v=0; v<kinect.depthHeight();
v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; // stroke(255,255,0); if(point.z>0) { vertex(point.x, point.y, point.z); } } } endShape(); if(point.z>0 && point.z<1500) { vertex(point.x, point.y, point.z); } 除去 1500mm未満なら描画
48.
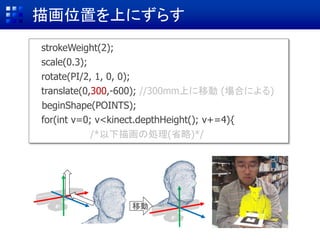
描画位置を上にずらす 移動 strokeWeight(2); scale(0.3); rotate(PI/2, 1, 0,
0); translate(0,0,-600); //600mm後ろに戻す (場合による) beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ /*以下描画の処理(省略)*/ translate(0,300,-600); //300mm上に移動 (場合による)
49.
点描にカメラ画像の色を割り当てよう beginShape(POINTS); for(int v=0; v<kinect.depthHeight();
v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; // color pixelColor = rgbImage.pixels[index]; stroke(255,255,0); if(point.z>0) { vertex(point.x, point.y, point.z); } } } endShape(); stroke(pixelColor); //各ピクセルの色を指定
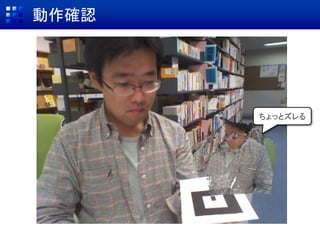
50.
動作確認 ちょっとズレる
51.
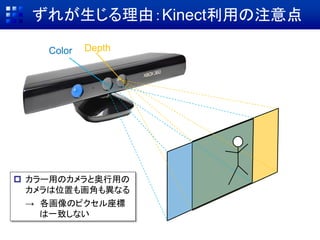
ずれが生じる理由:Kinect利用の注意点 Color Depth カラー用のカメラと奥行用の カメラは位置も画角も異なる →
各画像のピクセル座標 は一致しない
52.
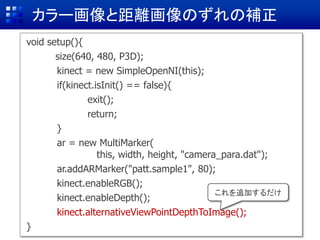
カラー画像と距離画像のずれの補正 void setup(){ size(640, 480,
P3D); kinect = new SimpleOpenNI(this); if(kinect.isInit() == false){ exit(); return; } ar = new MultiMarker( this, width, height, "camera_para.dat"); ar.addARMarker("patt.sample1", 80); kinect.enableRGB(); kinect.enableDepth(); kinect.alternativeViewPointDepthToImage(); } これを追加するだけ
53.
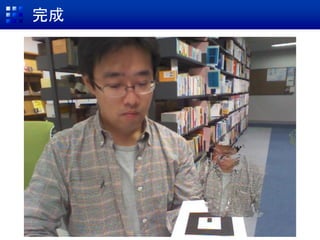
完成
54.
【参考】 • processingリファレンス https://processing.org/reference/ • SimpleOpneNI公式サイト https://code.google.com/p/simple-openni/ •
NyARToolKit公式サイト http://nyatla.jp/nyartoolkit/wp/ • ARToolKit公式サイト(最新) http://artoolkit.org/



![距離画像を3次元情報に変換
void draw(){
kinect.update();
PImage rgbImage = kinect.rgbImage();
//縦横(pixel)とDepthの組をx,y,z座標(mm)に変換
//PVectorの一次元配列に全データを記録
PVector[] realWorld = kinect.depthMapRealWorld();
/*以下省略*/
pixelと濃淡
変換
実空間](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-36-320.jpg)
![距離画像とrealWorldとの対応付け
P00
(x,y,z)
P01
(x,y,z)
P02
(x,y,z)
P10
(x,y,z)
P11
(x,y,z)
P12
(x,y,z)
P20
(x,y,z)
P21
(x,y,z)
P23
(x,y,z)
【ポイント】
3次元座標は一次
元配列realWorld
に格納されている
任意のu,vピクセル
のx,y,zを知るには
計算が必要
P00 P01 P02 P10 P11 P12 P20 P21 P22 ・・・
0 1 2
v
0
1
2
u
realWorld
[0] [1] [2] [3] [4] [5] [6] [7] [8] ・・・
v = 0 段目 v = 1 段目 v = 2 段目
ピクセルu,vでの3次元座標 → realWorld[v*画像の横幅 + u]
【距離画像】](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-37-320.jpg)
![3Dデータを描画しよう (2/2)
beginShape(POINTS);
endShape();
//v:縦, u:横、それぞれ4pixelおきに3次元座標を取得
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index];
stroke(255,255,0); //描画色(黄色)
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
X
Y
Z
黒画素(z=0)は
描画したくない](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-39-320.jpg)
![3Dデータを原点付近に移動させよう
translate(0,0,-600); //600mm後ろに戻す (場合による)
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index];
stroke(255,255,0); //描画色
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
endShape();
X
Y
Z](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-42-320.jpg)
![3Dデータを手乗りサイズにしよう
scale(0.3); //サイズを3/10にする
translate(0,0,-600);
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index]; //
stroke(255,255,0); //描画色
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-44-320.jpg)
![背景のデータを除去:描画範囲の限定
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index]; //
stroke(255,255,0);
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
endShape();
if(point.z>0 && point.z<1500) {
vertex(point.x, point.y, point.z);
}
除去
1500mm未満なら描画](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-47-320.jpg)
![点描にカメラ画像の色を割り当てよう
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index]; //
color pixelColor = rgbImage.pixels[index];
stroke(255,255,0);
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
endShape();
stroke(pixelColor); //各ピクセルの色を指定](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-49-320.jpg)