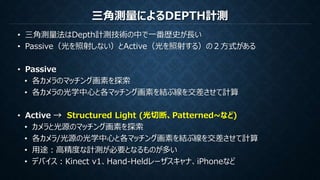
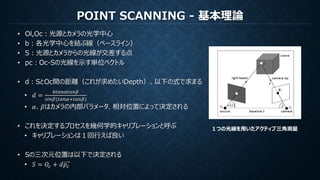
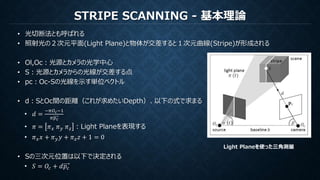
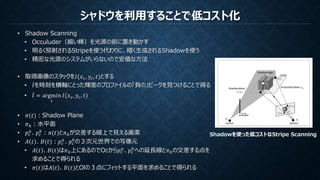
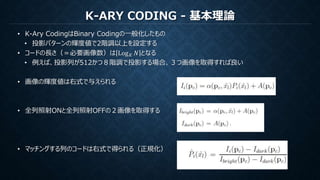
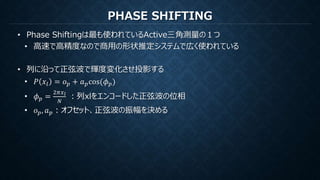
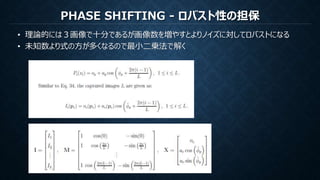
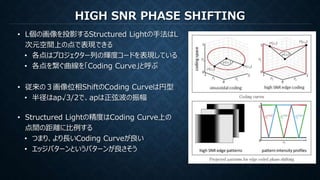
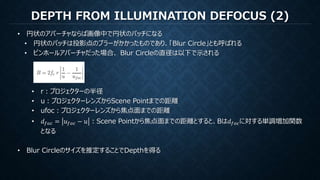
他に提案されているSINGLE-SHOTのパターン (1)
• binarygrids and zone plate patterns [Will and Pennington 1972]
• 1D color De Bruijn codes [Zhang et al. 2002; Yamazaki et al. 2011] → 図(a)
• sparse set of 1D stripes with random cuts [Maruyama and Abe 1993]
• multiple sets of 1D stripes for all-round 3D scanning [Furukawa et al. 2010]
• sparse 2D grid of lines [Salvi et al. 1998; Proesmans et al. 1996b; 1996a]
• 2D color encoded grids [Boyer and Kak 1987; Sagawa et al. 2009] → 図(b)
• grid patterns with spacings that follow a De Bruijn sequence [Ulusoy et al. 2009]
• 2D pseudo-random binary code[Vuylsteke and Oosterlinck 1990] → 図(c)
• 2D random dots (used in the first generation Microsoft Kinect depth sensing cameras)
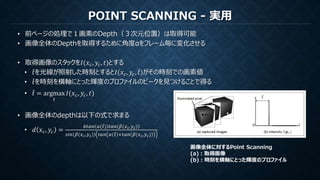
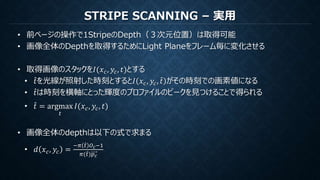
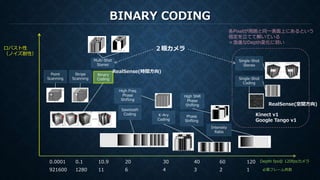
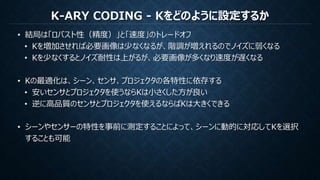
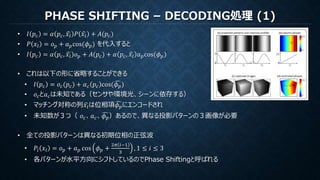
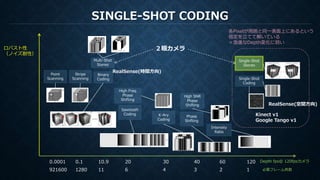
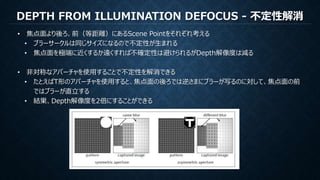
SINGLE-SHOT STEREO –投影パターン
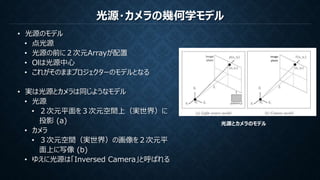
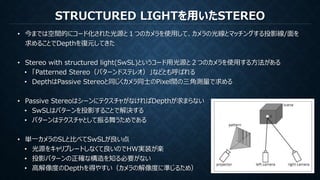
• SwSLにおいてマッチング推定がうまくいくかは近傍の空間的なテクスチャを各画素が保持しているか次第
• テクスチャは投影パターンから得られ、パターンは局所的に独自性を持っていなければならない
• De Bruijinシーケンスは局所的なサブパターンが独自性を持っていることを補償しており、SwSLでも使用
可能
• 当然他のパターンも使われる(企業などは知財リスク回避のために独自パターンを使うことが多い)
• a pattern with color stripes [Chen et al. 1997]
• random dots texture [Nishihara 1984]
• random frequency modulated sinusoidal pattern [Kang et al. 1995]
• 2D binary patterns that are resistant to noise and camera defocus blur [Konolige
2010]
59.
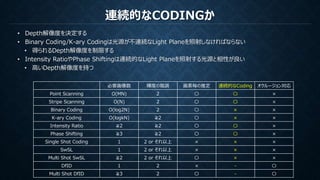
商用製品の投影パターン
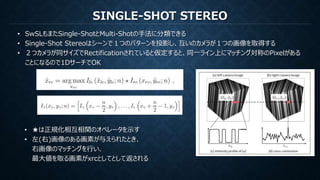
Microsoft Kinect v1Google Tango v1Intel RealSense
Single Shot Coding方式
Binary Coding方式
random dotrandom dotbinary stripe
binary Coding
RealSenseはBinary CodingとSingle Shot Coding方式の
Hybrid構成を採用している?
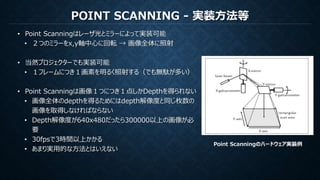
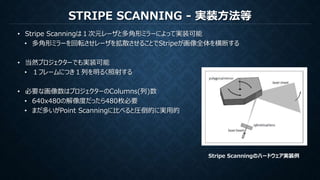
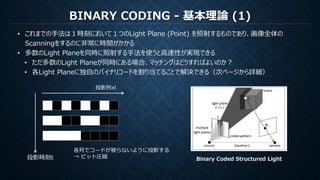
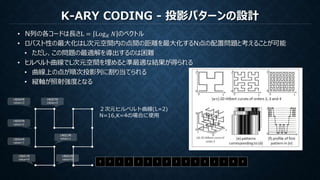
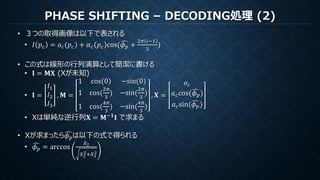
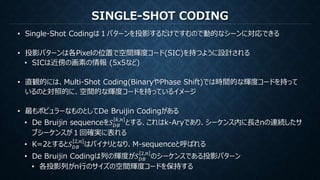
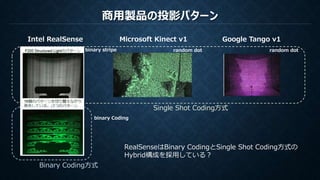
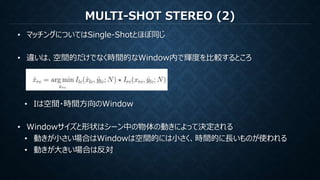
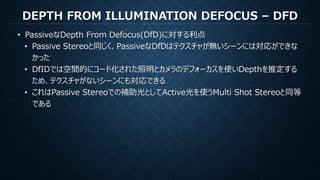
MULTI-SHOT STEREO (1)
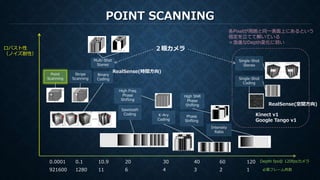
•Multi-ShotのSwSLでは、プロジェクターは多数のパターンを順次照射し、各カメラが全て取得する
• パターン例
• Single sweeping line stripe [Davis and Chen 2001; M. et al. 2008]
• The binary Gray coded sequence [Scharstein and Szeliski 2003] → 図(a)
• High frequency random binary patterns [Zhang et al. 2003] → 図(b)
• Temporally varying laser speckle patterns [Schaffer et al. 2014]
参考文献
Gupta, M., Nakhate,N. Geometric Perspective on Structured Light Coding, ECCV, 2018
Gupta, M., Agrawal, A., Veeraraghavan, A., and Narasimhan, S. G. 2013. A practical
approach to 3d scanning in the presence of interreflections, subsurface scattering and defocus.
International Journal of Computer Vision 102, 1-3, 33–55.
Gupta, M. and Nayar, S. K. 2012. Micro phase shifting. In Proc. IEEE CVPR.
Gupta, M., Nayar, S. K., Hullin, M., and Martin, J. 2015. Phasor Imaging: A Generalization
of Correlation Based Time-of-Flight Imaging. ACM Transactions on Graphics.
Gushov, V. I. and Solodkin, Y. N. 1991. Automatic processing of fringe patterns in integer
interferometers. Optics and Lasers in Engineering 14, 4-5.
Hartley, R. and Gupta, R. 1993. Computing matched-epipolar projections. In IEEE CVPR.
549–555.
Matsuda, N., Cossairt, O., and Gupta, M. 2015. MC3D: Motion Contrast 3D Scanning. In
IEEE International Conference on Computational Photography.






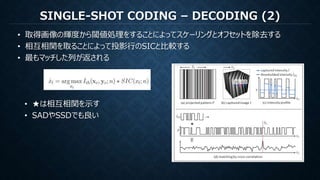
![他に提案されているSINGLE-SHOTのパターン (1)
• binary grids and zone plate patterns [Will and Pennington 1972]
• 1D color De Bruijn codes [Zhang et al. 2002; Yamazaki et al. 2011] → 図(a)
• sparse set of 1D stripes with random cuts [Maruyama and Abe 1993]
• multiple sets of 1D stripes for all-round 3D scanning [Furukawa et al. 2010]
• sparse 2D grid of lines [Salvi et al. 1998; Proesmans et al. 1996b; 1996a]
• 2D color encoded grids [Boyer and Kak 1987; Sagawa et al. 2009] → 図(b)
• grid patterns with spacings that follow a De Bruijn sequence [Ulusoy et al. 2009]
• 2D pseudo-random binary code[Vuylsteke and Oosterlinck 1990] → 図(c)
• 2D random dots (used in the first generation Microsoft Kinect depth sensing cameras)](https://image.slidesharecdn.com/structuredlight-191126084146/85/Structured-Light-52-320.jpg)

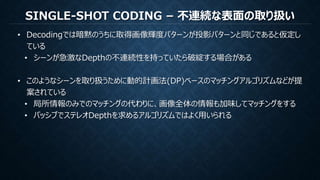
![SINGLE-SHOT STEREO – 投影パターン
• SwSLにおいてマッチング推定がうまくいくかは近傍の空間的なテクスチャを各画素が保持しているか次第
• テクスチャは投影パターンから得られ、パターンは局所的に独自性を持っていなければならない
• De Bruijinシーケンスは局所的なサブパターンが独自性を持っていることを補償しており、SwSLでも使用
可能
• 当然他のパターンも使われる(企業などは知財リスク回避のために独自パターンを使うことが多い)
• a pattern with color stripes [Chen et al. 1997]
• random dots texture [Nishihara 1984]
• random frequency modulated sinusoidal pattern [Kang et al. 1995]
• 2D binary patterns that are resistant to noise and camera defocus blur [Konolige
2010]](https://image.slidesharecdn.com/structuredlight-191126084146/85/Structured-Light-58-320.jpg)
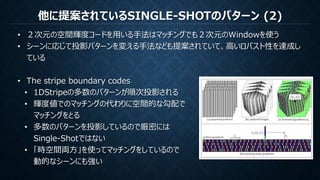
![MULTI-SHOT STEREO (1)
• Multi-ShotのSwSLでは、プロジェクターは多数のパターンを順次照射し、各カメラが全て取得する
• パターン例
• Single sweeping line stripe [Davis and Chen 2001; M. et al. 2008]
• The binary Gray coded sequence [Scharstein and Szeliski 2003] → 図(a)
• High frequency random binary patterns [Zhang et al. 2003] → 図(b)
• Temporally varying laser speckle patterns [Schaffer et al. 2014]](https://image.slidesharecdn.com/structuredlight-191126084146/85/Structured-Light-61-320.jpg)







![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)












![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)


















