Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
TY
Uploaded by
Takashi Yoshinaga
1,472 views
iPad LiDARで エンジニアカフェを3Dスキャン
2021年10月22日に開催されたLT会での発表資料
Technology
◦
Related topics:
Insights on Augmented Reality
•
Read more
0
Save
Share
Embed
Embed presentation
1
/ 15
2
/ 15
3
/ 15
4
/ 15
5
/ 15
6
/ 15
7
/ 15
8
/ 15
9
/ 15
10
/ 15
11
/ 15
12
/ 15
13
/ 15
14
/ 15
15
/ 15
More Related Content
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
ChatGPTは思ったほど賢くない
by
Carnot Inc.
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PDF
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
PDF
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
PDF
[DL輪読会]Learning to Simulate Complex Physics with Graph Networks
by
Deep Learning JP
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PPTX
Structure from Motion
by
Ryutaro Yamauchi
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
ChatGPTは思ったほど賢くない
by
Carnot Inc.
SLAM開発における課題と対策の一例の紹介
by
miyanegi
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
[DL輪読会]Learning to Simulate Complex Physics with Graph Networks
by
Deep Learning JP
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
Structure from Motion
by
Ryutaro Yamauchi
What's hot
PDF
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
PPTX
ORB-SLAMの手法解説
by
Masaya Kaneko
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
PDF
【DL輪読会】NeRF in the Palm of Your Hand: Corrective Augmentation for Robotics vi...
by
Deep Learning JP
PPTX
[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing
by
Deep Learning JP
PPTX
Nreal Lightハンズオン
by
Takashi Yoshinaga
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
PPTX
OpenXR + XR Interaction Toolkit使ったHoloLensコンテンツ開発検証 ~ (私が)完全に理解できたらちゃんと作れて、いろ...
by
Takahiro Miyaura
PPTX
【DL輪読会】DayDreamer: World Models for Physical Robot Learning
by
Deep Learning JP
PPTX
【Unity道場スペシャル 2017博多】クォータニオン完全マスター
by
Unity Technologies Japan K.K.
PDF
【DL輪読会】DINOv2: Learning Robust Visual Features without Supervision
by
Deep Learning JP
PPT
メタプログラミングって何だろう
by
Kota Mizushima
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PPTX
【DL輪読会】The Forward-Forward Algorithm: Some Preliminary
by
Deep Learning JP
PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
PDF
[DL輪読会]近年のオフライン強化学習のまとめ —Offline Reinforcement Learning: Tutorial, Review, an...
by
Deep Learning JP
PPTX
Direct Sparse Odometryの解説
by
Masaya Kaneko
PDF
[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...
by
Deep Learning JP
PPTX
[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation
by
Deep Learning JP
PPTX
【DL輪読会】An Image is Worth One Word: Personalizing Text-to-Image Generation usi...
by
Deep Learning JP
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
ORB-SLAMの手法解説
by
Masaya Kaneko
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
【DL輪読会】NeRF in the Palm of Your Hand: Corrective Augmentation for Robotics vi...
by
Deep Learning JP
[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing
by
Deep Learning JP
Nreal Lightハンズオン
by
Takashi Yoshinaga
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
OpenXR + XR Interaction Toolkit使ったHoloLensコンテンツ開発検証 ~ (私が)完全に理解できたらちゃんと作れて、いろ...
by
Takahiro Miyaura
【DL輪読会】DayDreamer: World Models for Physical Robot Learning
by
Deep Learning JP
【Unity道場スペシャル 2017博多】クォータニオン完全マスター
by
Unity Technologies Japan K.K.
【DL輪読会】DINOv2: Learning Robust Visual Features without Supervision
by
Deep Learning JP
メタプログラミングって何だろう
by
Kota Mizushima
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
【DL輪読会】The Forward-Forward Algorithm: Some Preliminary
by
Deep Learning JP
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
[DL輪読会]近年のオフライン強化学習のまとめ —Offline Reinforcement Learning: Tutorial, Review, an...
by
Deep Learning JP
Direct Sparse Odometryの解説
by
Masaya Kaneko
[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...
by
Deep Learning JP
[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation
by
Deep Learning JP
【DL輪読会】An Image is Worth One Word: Personalizing Text-to-Image Generation usi...
by
Deep Learning JP
Similar to iPad LiDARで エンジニアカフェを3Dスキャン
PPTX
iPad LiDARで作ってみた in AR Fukuoka 忘年会2020
by
Takashi Yoshinaga
PDF
OpenCVとRGB-Dセンサで作ろう壁面タッチパネル
by
Takashi Yoshinaga
PDF
レーザーレンジスキャナーと
by
edy555
PDF
レーザレンジスキャナーとWebGL
by
edy555
PDF
2015年5月期 AITCオープンラボ 「第二回 デジタルガジェット祭り!」
by
aitc_jp
PDF
空に、浮かぼうよ。
by
dechidechi1
PDF
20190131 lidar-camera fusion semantic segmentation survey
by
Takuya Minagawa
PDF
Immersal を活用した AR クラウドなシステム開発とハンズオン!
by
NishoMatsusita
PPTX
10年後のIT未来予想図 [センサー&デバイス編]_エフスタ!!TOKYO_20141205
by
Takesen - Takehisa Ito
PPTX
Structured Light 技術俯瞰
by
Teppei Kurita
PDF
はじめようARCore in 札幌
by
Takashi Yoshinaga
PPT
大浦工測 建築分野における3Dスキャナーの活用
by
Akira Oura
PDF
【CodeForJapanSummit2024 ワークショップ資料】モバイル端末で3Dスキャンをやってみよう!.pdf
by
Hiroki Ichikura
iPad LiDARで作ってみた in AR Fukuoka 忘年会2020
by
Takashi Yoshinaga
OpenCVとRGB-Dセンサで作ろう壁面タッチパネル
by
Takashi Yoshinaga
レーザーレンジスキャナーと
by
edy555
レーザレンジスキャナーとWebGL
by
edy555
2015年5月期 AITCオープンラボ 「第二回 デジタルガジェット祭り!」
by
aitc_jp
空に、浮かぼうよ。
by
dechidechi1
20190131 lidar-camera fusion semantic segmentation survey
by
Takuya Minagawa
Immersal を活用した AR クラウドなシステム開発とハンズオン!
by
NishoMatsusita
10年後のIT未来予想図 [センサー&デバイス編]_エフスタ!!TOKYO_20141205
by
Takesen - Takehisa Ito
Structured Light 技術俯瞰
by
Teppei Kurita
はじめようARCore in 札幌
by
Takashi Yoshinaga
大浦工測 建築分野における3Dスキャナーの活用
by
Akira Oura
【CodeForJapanSummit2024 ワークショップ資料】モバイル端末で3Dスキャンをやってみよう!.pdf
by
Hiroki Ichikura
More from Takashi Yoshinaga
PPTX
HoloLens2とMeta QuestではじめるWebXR
by
Takashi Yoshinaga
PPTX
【準備編】OculusQuest/HoloLens2対応WebXR開発
by
Takashi Yoshinaga
PPTX
ARコンテンツ作成勉強会( #AR_Fukuoka )紹介
by
Takashi Yoshinaga
PPTX
AI x WebAR: MediaPipeのハンドトラッキングを使ってみよう
by
Takashi Yoshinaga
PPTX
AI x OpenCV x WebAR: Selfie Segmentationを使ってみよう
by
Takashi Yoshinaga
PPTX
Web技術ではじめようAR/VRアプリ開発
by
Takashi Yoshinaga
PPTX
MRTKをNreal Lightに対応させてみた
by
Takashi Yoshinaga
PPTX
【準備編!】HoloLens 2/Oculus Quest対応WebXRハンズオン
by
Takashi Yoshinaga
PPTX
A-Frameで始めるWebXRとハンドトラッキング (HoloLens2/Oculus Quest対応)
by
Takashi Yoshinaga
PPTX
Holo-SDKハンズオン:はじめようヘッドトラッキングを用いた3D表現
by
Takashi Yoshinaga
PPTX
FUKUOKA Engineers Day 2021 発表資料:AR Fukuoka & HoloBox紹介
by
Takashi Yoshinaga
PPTX
Voxon Photonics VX1 で遊んでみた
by
Takashi Yoshinaga
PPTX
AR-Frame x AR.js入門
by
Takashi Yoshinaga
PPTX
AI x WebXR: フェイストラッキングを用いた擬似3D表現を解説!
by
Takashi Yoshinaga
PPTX
コロナ禍中のコミュニティ活動
by
Takashi Yoshinaga
PPTX
Project HoloBox
by
Takashi Yoshinaga
PPTX
AR Fukuoka紹介2020
by
Takashi Yoshinaga
PPTX
MRTKで始めるAR開発 (HoloLens 1 and 2, ARCore, ARkit)
by
Takashi Yoshinaga
PPTX
OSC2020 Fukuoka: インストールいらず、WebAR入門
by
Takashi Yoshinaga
PPTX
Oculus Quest 1&2 開発のはじめの一歩 with A-Frame WebVR
by
Takashi Yoshinaga
HoloLens2とMeta QuestではじめるWebXR
by
Takashi Yoshinaga
【準備編】OculusQuest/HoloLens2対応WebXR開発
by
Takashi Yoshinaga
ARコンテンツ作成勉強会( #AR_Fukuoka )紹介
by
Takashi Yoshinaga
AI x WebAR: MediaPipeのハンドトラッキングを使ってみよう
by
Takashi Yoshinaga
AI x OpenCV x WebAR: Selfie Segmentationを使ってみよう
by
Takashi Yoshinaga
Web技術ではじめようAR/VRアプリ開発
by
Takashi Yoshinaga
MRTKをNreal Lightに対応させてみた
by
Takashi Yoshinaga
【準備編!】HoloLens 2/Oculus Quest対応WebXRハンズオン
by
Takashi Yoshinaga
A-Frameで始めるWebXRとハンドトラッキング (HoloLens2/Oculus Quest対応)
by
Takashi Yoshinaga
Holo-SDKハンズオン:はじめようヘッドトラッキングを用いた3D表現
by
Takashi Yoshinaga
FUKUOKA Engineers Day 2021 発表資料:AR Fukuoka & HoloBox紹介
by
Takashi Yoshinaga
Voxon Photonics VX1 で遊んでみた
by
Takashi Yoshinaga
AR-Frame x AR.js入門
by
Takashi Yoshinaga
AI x WebXR: フェイストラッキングを用いた擬似3D表現を解説!
by
Takashi Yoshinaga
コロナ禍中のコミュニティ活動
by
Takashi Yoshinaga
Project HoloBox
by
Takashi Yoshinaga
AR Fukuoka紹介2020
by
Takashi Yoshinaga
MRTKで始めるAR開発 (HoloLens 1 and 2, ARCore, ARkit)
by
Takashi Yoshinaga
OSC2020 Fukuoka: インストールいらず、WebAR入門
by
Takashi Yoshinaga
Oculus Quest 1&2 開発のはじめの一歩 with A-Frame WebVR
by
Takashi Yoshinaga
iPad LiDARで エンジニアカフェを3Dスキャン
1.
iPad LiDARで エンジニアカフェを3Dスキャン xTechゆるっとLT
2.
自己紹介 氏名:吉永崇(Takashi Yoshinaga) 仕事:ARの基礎・応用技術に関するR&D - 医療/土木応用や遠隔コミュニケーション -
3D計測やモーションキャプチャ開発 ほか : 趣味で何かしらAR的なものを作る Twitter: @Taka_Yoshinaga
3.
赤外線を飛ばして実物体から反射 して返ってくるまでの時間などを 用いて奥行きを計測する技術 Kinectのようにセンサの前の構造物 の形状を点群(Point
Cloud)で取得 従来はPCとセンサをケーブル等で 接続する必要があり、気軽にスキャ ンできるものではなかった ところが・・・ iPadやiPhoneに搭載されたことで手 軽にPointCloud取得が可能に! しかも端末の位置・姿勢もわかる LiDAR センサ 参考記事: htps://aru47.hatenablog.com/entry/2020/04/05/230350 3Dスキャナを作ろう!
4.
開発環境 Unity 2020
ARFoundation ARKit [参考] ARFoundation 公式サンプル https://github.com/Unity-Technologies/arfoundation-samples
5.
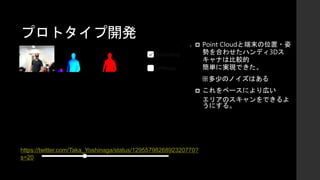
プロトタイプ開発 Point Cloudと端末の位置・姿 勢を合わせたハンディ3Dス キャナは比較的 簡単に実現できた。 ※多少のノイズはある
これをベースにより広い エリアのスキャンをできるよ うにする。 https://twitter.com/Taka_Yoshinaga/status/1295579826892320770? s=20
6.
System Configuration [実現したいこと] iPadがクラッシュしてもデータを残す
スキャン結果を即座に他のAR/VRアプリに共有 Server 表示デバイス データをサーバーで管理
7.
エンジニアカフェのスキャン https://twitter.com/Taka_Yoshinaga/status/1278261007186419712?s =20
8.
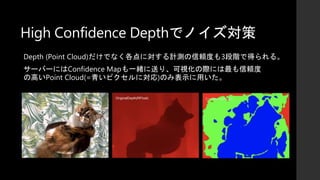
High Confidence Depthでノイズ対策 Depth
(Point Cloud)だけでなく各点に対する計測の信頼度も3段階で得られる。 サーバーにはConfidence Mapも一緒に送り、可視化の際には最も信頼度 の高いPoint Cloud(=青いピクセルに対応)のみ表示に用いた。
9.
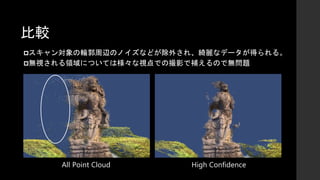
比較 スキャン対象の輪郭周辺のノイズなどが除外され、綺麗なデータが得られる。 無視される領域については様々な視点での撮影で補えるので無問題 All Point Cloud
High Confidence
10.
1F,2F,外のスキャン https://twitter.com/Taka_Yoshinaga/status/1311985507673370624?s =20
11.
HoloLens 2にも対応 https://twitter.com/Taka_Yoshinaga/status/1297034708270817280?s =20
12.
Further Work HoloLens2にも Depthセンサあるよね?
13.
HoloLens2で歩きスキャン https://youtu.be/TbfqO0vuEVk
14.
まとめ iPadやiPhoneにLiDARが搭載されRGB-Dセンシングが身近に 3次元的な位置・姿勢もわかるため3Dスキャンが容易
点群を外部に送ることで表示はつよつよPCに任せられる 建物のスキャンをすると壁や天井の厚さを見られて面白い Unityサンプル(通信以外)をGitHubで公開中!


![開発環境
Unity 2020
ARFoundation
ARKit
[参考]
ARFoundation 公式サンプル
https://github.com/Unity-Technologies/arfoundation-samples](https://image.slidesharecdn.com/lidarscan-211022130523/85/iPad-LiDAR-3D-4-320.jpg)
![System Configuration
[実現したいこと]
iPadがクラッシュしてもデータを残す
スキャン結果を即座に他のAR/VRアプリに共有
Server
表示デバイス
データをサーバーで管理](https://image.slidesharecdn.com/lidarscan-211022130523/85/iPad-LiDAR-3D-6-320.jpg)






![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning to Simulate Complex Physics with Graph Networks](https://cdn.slidesharecdn.com/ss_thumbnails/learningtosimulatecomplexphysicswithgraphnetworks-200508054213-thumbnail.jpg?width=640&height=640&fit=bounds)




![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)










![[DL輪読会]近年のオフライン強化学習のまとめ —Offline Reinforcement Learning: Tutorial, Review, an...](https://cdn.slidesharecdn.com/ss_thumbnails/20200626journalclubpub-200630064755-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation](https://cdn.slidesharecdn.com/ss_thumbnails/20190517hrnet-190517005504-thumbnail.jpg?width=640&height=640&fit=bounds)

































