Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Kenta Oono
PDF, PPTX
6,208 views
Stochastic Gradient MCMC
Preferred Seminar 2016/1/21
Technology
◦
Related topics:
Data Mining Insights
•
Read more
21
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 29
2
/ 29
Most read
3
/ 29
4
/ 29
5
/ 29
6
/ 29
7
/ 29
8
/ 29
9
/ 29
10
/ 29
11
/ 29
12
/ 29
13
/ 29
14
/ 29
15
/ 29
16
/ 29
17
/ 29
18
/ 29
19
/ 29
20
/ 29
21
/ 29
22
/ 29
23
/ 29
24
/ 29
25
/ 29
26
/ 29
27
/ 29
28
/ 29
29
/ 29
More Related Content
PDF
階層モデルの分散パラメータの事前分布について
by
hoxo_m
PPTX
ベイズファクターとモデル選択
by
kazutantan
PDF
グラフニューラルネットワークとグラフ組合せ問題
by
joisino
PDF
最適輸送の計算アルゴリズムの研究動向
by
ohken
PDF
ベイズ最適化
by
MatsuiRyo
PDF
「統計的学習理論」第1章
by
Kota Matsui
PDF
階層ベイズとWAIC
by
Hiroshi Shimizu
PDF
機械学習のためのベイズ最適化入門
by
hoxo_m
階層モデルの分散パラメータの事前分布について
by
hoxo_m
ベイズファクターとモデル選択
by
kazutantan
グラフニューラルネットワークとグラフ組合せ問題
by
joisino
最適輸送の計算アルゴリズムの研究動向
by
ohken
ベイズ最適化
by
MatsuiRyo
「統計的学習理論」第1章
by
Kota Matsui
階層ベイズとWAIC
by
Hiroshi Shimizu
機械学習のためのベイズ最適化入門
by
hoxo_m
What's hot
PDF
Rによるやさしい統計学第20章「検定力分析によるサンプルサイズの決定」
by
Takashi J OZAKI
PDF
Recent Advances on Transfer Learning and Related Topics Ver.2
by
Kota Matsui
PPTX
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial)
by
RyuichiKanoh
PDF
深層学習の不確実性 - Uncertainty in Deep Neural Networks -
by
tmtm otm
PPTX
ようやく分かった!最尤推定とベイズ推定
by
Akira Masuda
PDF
深層生成モデルと世界モデル
by
Masahiro Suzuki
PPTX
ベイズ統計学の概論的紹介
by
Naoki Hayashi
PPTX
劣モジュラ最適化と機械学習1章
by
Hakky St
PDF
ブースティング入門
by
Retrieva inc.
PPTX
[DL輪読会]ドメイン転移と不変表現に関するサーベイ
by
Deep Learning JP
PDF
HiPPO/S4解説
by
Morpho, Inc.
PDF
レプリカ交換モンテカルロ法で乱数の生成
by
Nagi Teramo
PDF
スペクトラル・クラスタリング
by
Akira Miyazawa
PDF
数学で解き明かす深層学習の原理
by
Taiji Suzuki
PPTX
MCMC法
by
MatsuiRyo
PDF
グラフィカル Lasso を用いた異常検知
by
Yuya Takashina
PDF
[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent
by
Deep Learning JP
PDF
トピックモデルの評価指標 Perplexity とは何なのか?
by
hoxo_m
PPTX
変分ベイズ法の説明
by
Haruka Ozaki
PDF
[DL輪読会]ICLR2020の分布外検知速報
by
Deep Learning JP
Rによるやさしい統計学第20章「検定力分析によるサンプルサイズの決定」
by
Takashi J OZAKI
Recent Advances on Transfer Learning and Related Topics Ver.2
by
Kota Matsui
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial)
by
RyuichiKanoh
深層学習の不確実性 - Uncertainty in Deep Neural Networks -
by
tmtm otm
ようやく分かった!最尤推定とベイズ推定
by
Akira Masuda
深層生成モデルと世界モデル
by
Masahiro Suzuki
ベイズ統計学の概論的紹介
by
Naoki Hayashi
劣モジュラ最適化と機械学習1章
by
Hakky St
ブースティング入門
by
Retrieva inc.
[DL輪読会]ドメイン転移と不変表現に関するサーベイ
by
Deep Learning JP
HiPPO/S4解説
by
Morpho, Inc.
レプリカ交換モンテカルロ法で乱数の生成
by
Nagi Teramo
スペクトラル・クラスタリング
by
Akira Miyazawa
数学で解き明かす深層学習の原理
by
Taiji Suzuki
MCMC法
by
MatsuiRyo
グラフィカル Lasso を用いた異常検知
by
Yuya Takashina
[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent
by
Deep Learning JP
トピックモデルの評価指標 Perplexity とは何なのか?
by
hoxo_m
変分ベイズ法の説明
by
Haruka Ozaki
[DL輪読会]ICLR2020の分布外検知速報
by
Deep Learning JP
Viewers also liked
PDF
2015年9月18日 (GTC Japan 2015) 深層学習フレームワークChainerの導入と化合物活性予測への応用
by
Kenta Oono
PDF
From mcmc to sgnht
by
Keisuke Hosaka
PDF
ロマンティックな9つの数 #ロマ数ボーイズ
by
Junpei Tsuji
PDF
Juliaで学ぶ Hamiltonian Monte Carlo (NUTS 入り)
by
Kenta Sato
PDF
Chainer Contribution Guide
by
Kenta Oono
PDF
結晶と空間充填 #ロマ数ボーイズ
by
hinge dearsip
PDF
On the benchmark of Chainer
by
Kenta Oono
PDF
Deep Learning技術の最近の動向とPreferred Networksの取り組み
by
Kenta Oono
PDF
Bishop prml 11.5-11.6_wk77_100606-1152(発表に使った資料)
by
Wataru Kishimoto
PDF
RSS Read Paper by Mark Girolami
by
Christian Robert
PDF
数学に包まれた生活 - 日曜にゼータ関数を(略 #ロマンティック数学ナイト
by
Junpei Tsuji
PPTX
WAICとWBICのご紹介
by
Tomoki Matsumoto
PDF
何故宇宙人も同じ数学に辿りつくか
by
Kento Ichikawa
PDF
HMC and NUTS
by
Marco Banterle
PDF
Replica exchange MCMC
by
. .
PDF
集中不等式のすすめ [集中不等式本読み会#1]
by
Kentaro Minami
PDF
Caffeインストール
by
Kenta Oono
PDF
提供AMIについて
by
Kenta Oono
PDF
Techtalk:多様体
by
Kenta Oono
PDF
並列データベースシステムの概念と原理
by
Makoto Yui
2015年9月18日 (GTC Japan 2015) 深層学習フレームワークChainerの導入と化合物活性予測への応用
by
Kenta Oono
From mcmc to sgnht
by
Keisuke Hosaka
ロマンティックな9つの数 #ロマ数ボーイズ
by
Junpei Tsuji
Juliaで学ぶ Hamiltonian Monte Carlo (NUTS 入り)
by
Kenta Sato
Chainer Contribution Guide
by
Kenta Oono
結晶と空間充填 #ロマ数ボーイズ
by
hinge dearsip
On the benchmark of Chainer
by
Kenta Oono
Deep Learning技術の最近の動向とPreferred Networksの取り組み
by
Kenta Oono
Bishop prml 11.5-11.6_wk77_100606-1152(発表に使った資料)
by
Wataru Kishimoto
RSS Read Paper by Mark Girolami
by
Christian Robert
数学に包まれた生活 - 日曜にゼータ関数を(略 #ロマンティック数学ナイト
by
Junpei Tsuji
WAICとWBICのご紹介
by
Tomoki Matsumoto
何故宇宙人も同じ数学に辿りつくか
by
Kento Ichikawa
HMC and NUTS
by
Marco Banterle
Replica exchange MCMC
by
. .
集中不等式のすすめ [集中不等式本読み会#1]
by
Kentaro Minami
Caffeインストール
by
Kenta Oono
提供AMIについて
by
Kenta Oono
Techtalk:多様体
by
Kenta Oono
並列データベースシステムの概念と原理
by
Makoto Yui
Similar to Stochastic Gradient MCMC
PDF
渡辺澄夫著「ベイズ統計の理論と方法」5.1 マルコフ連鎖モンテカルロ法
by
Kenichi Hironaka
PDF
[DL輪読会]Deep Learning for Sampling from Arbitrary Probability Distributions
by
Deep Learning JP
PPTX
マルコフ連鎖モンテカルロ法
by
Masafumi Enomoto
PDF
ベイズ推定でパラメータリスクを捉える&優れたサンプラーとしてのMCMC
by
基晴 出井
PDF
201803NC
by
Naoki Hayashi
PDF
RBM、Deep Learningと学習(全脳アーキテクチャ若手の会 第3回DL勉強会発表資料)
by
Takuma Yagi
PDF
MCMCとともだちになろう【※Docswellにも同じものを上げています】
by
Hiroyuki Muto
PDF
MLaPP 24章 「マルコフ連鎖モンテカルロ法 (MCMC) による推論」
by
moterech
PDF
RStanとShinyStanによるベイズ統計モデリング入門
by
Masaki Tsuda
PDF
自動微分変分ベイズ法の紹介
by
Taku Yoshioka
PPTX
論文紹介 Markov chain monte carlo and variational inferences bridging the gap
by
Shuuji Mihara
PDF
基礎からのベイズ統計学第5章
by
hiro5585
PDF
逐次モンテカルロ法の基礎
by
ShoutoYonekura
PPTX
ベイズ統計学の概論的紹介-old
by
Naoki Hayashi
PPTX
MCMC法
by
Daisuke Yoneoka
PPT
大森ゼミ新歓
by
T Nakagawa
PDF
Monte Carlo Methods (Chapter 17 in Deep learning by Ian Goodfellow)
by
Tomoki Tanimura
PPTX
マルコフ連鎖モンテカルロ法 (2/3はベイズ推定の話)
by
Yoshitake Takebayashi
PPTX
Probabilistic Graphical Models 輪読会 Chapter 4.1 - 4.4
by
Yoshinari Fujinuma
PPTX
Gmm勉強会
by
Hayato Ohya
渡辺澄夫著「ベイズ統計の理論と方法」5.1 マルコフ連鎖モンテカルロ法
by
Kenichi Hironaka
[DL輪読会]Deep Learning for Sampling from Arbitrary Probability Distributions
by
Deep Learning JP
マルコフ連鎖モンテカルロ法
by
Masafumi Enomoto
ベイズ推定でパラメータリスクを捉える&優れたサンプラーとしてのMCMC
by
基晴 出井
201803NC
by
Naoki Hayashi
RBM、Deep Learningと学習(全脳アーキテクチャ若手の会 第3回DL勉強会発表資料)
by
Takuma Yagi
MCMCとともだちになろう【※Docswellにも同じものを上げています】
by
Hiroyuki Muto
MLaPP 24章 「マルコフ連鎖モンテカルロ法 (MCMC) による推論」
by
moterech
RStanとShinyStanによるベイズ統計モデリング入門
by
Masaki Tsuda
自動微分変分ベイズ法の紹介
by
Taku Yoshioka
論文紹介 Markov chain monte carlo and variational inferences bridging the gap
by
Shuuji Mihara
基礎からのベイズ統計学第5章
by
hiro5585
逐次モンテカルロ法の基礎
by
ShoutoYonekura
ベイズ統計学の概論的紹介-old
by
Naoki Hayashi
MCMC法
by
Daisuke Yoneoka
大森ゼミ新歓
by
T Nakagawa
Monte Carlo Methods (Chapter 17 in Deep learning by Ian Goodfellow)
by
Tomoki Tanimura
マルコフ連鎖モンテカルロ法 (2/3はベイズ推定の話)
by
Yoshitake Takebayashi
Probabilistic Graphical Models 輪読会 Chapter 4.1 - 4.4
by
Yoshinari Fujinuma
Gmm勉強会
by
Hayato Ohya
More from Kenta Oono
PDF
Minimax statistical learning with Wasserstein distances (NeurIPS2018 Reading ...
by
Kenta Oono
PDF
Deep learning for molecules, introduction to chainer chemistry
by
Kenta Oono
PDF
Overview of Machine Learning for Molecules and Materials Workshop @ NIPS2017
by
Kenta Oono
PDF
Comparison of deep learning frameworks from a viewpoint of double backpropaga...
by
Kenta Oono
PDF
深層学習フレームワーク概要とChainerの事例紹介
by
Kenta Oono
PDF
20170422 数学カフェ Part2
by
Kenta Oono
PDF
20170422 数学カフェ Part1
by
Kenta Oono
PDF
情報幾何学の基礎、第7章発表ノート
by
Kenta Oono
PDF
GTC Japan 2016 Chainer feature introduction
by
Kenta Oono
PDF
Tokyo Webmining Talk1
by
Kenta Oono
PDF
VAE-type Deep Generative Models
by
Kenta Oono
PDF
Common Design of Deep Learning Frameworks
by
Kenta Oono
PDF
Introduction to Chainer and CuPy
by
Kenta Oono
PDF
Introduction to Chainer (LL Ring Recursive)
by
Kenta Oono
PDF
日本神経回路学会セミナー「DeepLearningを使ってみよう!」資料
by
Kenta Oono
PDF
Chainerインストール
by
Kenta Oono
PDF
ディープラーニング最近の発展とビジネス応用への課題
by
Kenta Oono
PDF
Encode勉強会:GENCODE: The reference human genome annotation for The ENCODE Proje...
by
Kenta Oono
PDF
Learning Image Embeddings using Convolutional Neural Networks for Improved Mu...
by
Kenta Oono
PDF
Development and Experiment of Deep Learning with Caffe and maf
by
Kenta Oono
Minimax statistical learning with Wasserstein distances (NeurIPS2018 Reading ...
by
Kenta Oono
Deep learning for molecules, introduction to chainer chemistry
by
Kenta Oono
Overview of Machine Learning for Molecules and Materials Workshop @ NIPS2017
by
Kenta Oono
Comparison of deep learning frameworks from a viewpoint of double backpropaga...
by
Kenta Oono
深層学習フレームワーク概要とChainerの事例紹介
by
Kenta Oono
20170422 数学カフェ Part2
by
Kenta Oono
20170422 数学カフェ Part1
by
Kenta Oono
情報幾何学の基礎、第7章発表ノート
by
Kenta Oono
GTC Japan 2016 Chainer feature introduction
by
Kenta Oono
Tokyo Webmining Talk1
by
Kenta Oono
VAE-type Deep Generative Models
by
Kenta Oono
Common Design of Deep Learning Frameworks
by
Kenta Oono
Introduction to Chainer and CuPy
by
Kenta Oono
Introduction to Chainer (LL Ring Recursive)
by
Kenta Oono
日本神経回路学会セミナー「DeepLearningを使ってみよう!」資料
by
Kenta Oono
Chainerインストール
by
Kenta Oono
ディープラーニング最近の発展とビジネス応用への課題
by
Kenta Oono
Encode勉強会:GENCODE: The reference human genome annotation for The ENCODE Proje...
by
Kenta Oono
Learning Image Embeddings using Convolutional Neural Networks for Improved Mu...
by
Kenta Oono
Development and Experiment of Deep Learning with Caffe and maf
by
Kenta Oono
Recently uploaded
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Stochastic Gradient MCMC
1.
Stochastic Gradient MCMC 株式会社
Preferred Networks ⼤野健太 oono@preferred.jp 2016/01/21 Preferred セミナー
2.
⾃⼰紹介 • ⼤野健太(@delta2323_) • 経歴:数理科学研究科・修⼠課程(共形幾何) •
→ 2012.3 PFI → 2014.10 PFN • 所属:研究班(理論解析・ライフサイエンス・Chainer開発メンバー) • ブログ:http://delta2323.github.io • 最近の活動 • NIPS2014勉強会・ICML2015勉強会主催 • ⽇経ビッグデータ短期連載・雑誌寄稿など 2
3.
NIPS2015 Workshopにて 3
4.
今⽇のテーマ • 事後確率からのサンプリングをMCMCで⾏う問題設定 • 特に、訓練データからサブサンプリングして、勾配の近似値を推定することでスケーラブルにす る、Stochastic
Gradient MCMC (SG-MCMC)を紹介します • 紹介する⼿法 • (HMC : Hamiltonian Monte Carlo) ← “Stochastic”ではない • SGHMC : Stochastic Gradient Hamiltonian Monte Carlo • SGLD : Stochastic Gradient Langevin Dynamics • (m) SGNHT : (multivariate) Stochastic Gradient Nose-Hoover Thermostat • (Santa : Stochastic AnNealing Thermostats with Adaptive momentum) ← サンプリン グではなくMAP推定 4
5.
まとめ 5 HMC SGHMC SGLD SGNHT mSGNHT Santa RMSprop SGRLD 勾配を推定値 に置き換える フィッシャー 計量の導⼊ 摩擦→∞
サーモスタット パラメータの導⼊ 各次元に サーモスタット 幾何情報の 推定⽅法の輸⼊ ⾮ユークリッド化 + 焼きなまし SGRHMC gSGRHMC フィッシャー 計量の⼀般化 フィッシャー 計量導⼊
6.
MCMCとは • Markov Chain
Monte Carlo / マルコフ連鎖モンテカルロ法 • Markov Chain • 状態遷移モデルで次の状態が今の状態だけから決まるもの • Monte Carlo • 乱数を⽤いて数値計算・シミュレーション・サンプリングなどを⾏う⼿法 • パラメータ空間中を遷移するマルコフ連鎖を作り、その軌道をたどることで、パラメータ空間上 の確率分布からサンプリングを⾏う⼿法 6
7.
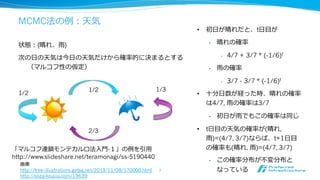
MCMC法の例:天気 状態:{晴れ、⾬} 次の⽇の天気は今⽇の天気だけから確率的に決まるとする (マルコフ性の仮定) 7 1/2 1/2 1/3 2/3 • 初⽇が晴れだと、t⽇⽬が • 晴れの確率 •
4/7 + 3/7 * (-1/6)t • ⾬の確率 • 3/7 - 3/7 * (-1/6)t • ⼗分⽇数が経った時、晴れの確率 は4/7, ⾬の確率は3/7 • 初⽇が⾬でもこの確率は同じ • t⽇⽬の天気の確率が(晴れ, ⾬)=(4/7, 3/7)ならば、t+1⽇⽬ の確率も(晴れ, ⾬)=(4/7, 3/7) • この確率分布が不変分布と なっている 「マルコフ連鎖モンテカルロ法⼊⾨-1」の例を引⽤ http://www.slideshare.net/teramonagi/ss-5190440 画像 http://free-illustrations.gatag.net/2013/11/08/170000.html http://sozaikoujou.com/19639
8.
MCMC法の基本戦略 • ⽬標:状態空間上の確率分布からサンプリングを⾏う • サンプリングしたい確率分布が不変分布となるような、マルコフ性を満たす状態遷移関数を作る •
適当な初期状態からスタートして、状態遷移関数に従って状態を次々と遷移させる • (⼗分時間が経つと、任意の時刻でスナップショットを取った時、ある状態にいる確率は不変分 布に従うようになる) • ⼗分時間が経った後に状態遷移から⼀定間隔で状態をサンプリングする • 本当はここでエルゴード性という性質を⽤いている • MCMC法のバリエーションは状態遷移関数をどのように作るかによって決まる。 8
9.
今回の問題設定 • 事後分布からのサンプリングを考える。 • θ
: ⽣成モデルのパラメータ • X = {x1, x2, …, xN} : 訓練データ、xn 〜 p(x | θ) i.i.d. • 事後分布:p(θ | X) からサンプリングを⾏いたい • 状態空間について • 幾つかの⼿法は θ の他に補助的なパラメータ (p, ξ…) を⽤いる。 • φ = θ, (θ, p), (θ, p, ξ) などを考え、その上の同時分布 p(φ| X) を考える • θ, p, ξいずれも連続変数 9
10.
なぜサンプリングが必要か? • 尤度 p(X
| θ) は計算できるが、事後分布 p(θ | X)は計算できないから 10 • θが⾼次元になると、分⺟の積分が解析的計算も数値計算も困難
11.
紹介する⼿法の特徴 • 状態空間上の質点が、ある運動⽅程式に従って運動している状況を考える。 • 今回の⼿法で⽤いる状態遷移関数は、その運動⽅程式を離散化することで得られる。 •
それぞれの⼿法のバリエーションは⽤いる運動⽅程式の種類によって⽣じる。 11
12.
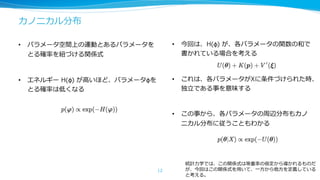
カノニカル分布 • パラメータ空間上の運動とあるパラメータを とる確率を紐づける関係式 • エネルギー
H(φ) が⾼いほど、パラメータφを とる確率は低くなる 12 統計⼒学では、この関係式は等重率の仮定から導かれるものだ が、今回はこの関係式を⽤いて、⼀⽅から他⽅を定義している と考える。 • 今回は、H(φ) が、各パラメータの関数の和で 書かれている場合を考える(Santaを除く) • これは、各パラメータがXに条件づけられた時、 独⽴である事を意味する • この事から、各パラメータの周辺分布もカノ ニカル分布に従うこともわかる
13.
HMC [Neal11] 古典的な運動⽅程式を考える 13 これを変形すると、 これを離散化すれば、 アルゴリズム
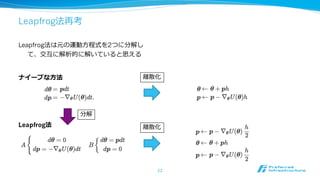
14.
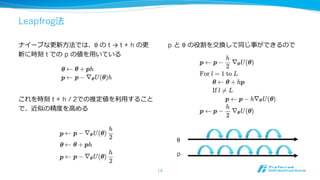
Leapfrog法 ナイーブな更新⽅法では、θ の t
→ t + h の更 新に時刻 t での p の値を⽤いている 14 これを時刻 t + h / 2での推定値を利⽤すること で、近似の精度を⾼める p と θ の役割を交換して同じ事ができるので θ p
15.
スケーラブルにする⽅法のアイデア ⽬標:HMCで⼒に対応する項 -∇θU(θ) を推定値で置き換える 15 左辺はベイズの定理でさらに計算できて、 カノニカル分布
第2項を |X~| << |X| となる X~で近似する
16.
SGHMC[Chen+14] じゃあHMCで-∇θU(θ)を単純に推定値に置 き換えれば良いか? → NO 16 左下の更新則は次の確率微分⽅程式を離散 化したもの p(θ,
p | X) ∝ exp(-U(φ) – K(p)) はこの運 動⽅程式の不変分布にならない これは次の更新則と同等(になってしまっ ている) 推定値を⽤いたHMCの更新則 V(θ) : サブサンプリングに伴う分散 ζのサンプリングは実際には⾏っていない
17.
SGHMC[Chen+14] そこで、同時分布が不変分布になるように、運 動⽅程式⾃体を変えてしまう 17 B(θ) = hV(θ)/2と置き直した この⽅程式は2次のLangevin
Dynamicと呼ばれ ている。これを離散化すると、 実際には、サブサンプリングによる分散B(θ)が 求まらない。論⽂ではこれを推定値B^に置き換 え、C>Bとなる係数を⽤いて系をコントロール するなどの⼯夫をしている さらにもう⼀段⼯夫すると、アルゴリズムは、 次のようになる
18.
SGLD[Welling+11], SGRLD[Patterson+13] SGLDの運動⽅程式は1次のLangevin Dynamics 18 SGHMCの2次のLangevin
Dynamicsで B→∞とした極限として得られる SGLDのアルゴリズム SGRLDは1次のLangevin DynamicsにFisher計量から くるパラメータ空間の幾何的な情報を加える G(θ)はフィッシャー⾏列の逆⾏列
19.
SGNHT[Ding+14] 系の温度をコントロールするサーモスタット のパラメータ ξ を⽤意し、摩擦をコント ロールする 19 アルゴリズム 背景となるのは以下の計算 K(p)
= pTp/2 Zkは p(p) ∝ exp(-K(p))の分配関数
20.
mSGNHT[Gan+15] サーモスタットに対応するパラメータ ξ を運動 量の各次元に⽤意する 20 アルゴリズム
21.
Santa ⼀⾔で⾔うと、mSGNHT + ⾮ユークリッド化 +
RMSprop + 焼きなまし 21 • ベースとなる運動⽅程式はmSGNHT • G1, G2にパラメータ空間の曲がり⽅の情報 を⼊れる (⾮ユークリッド化) • G1, G2の推定をオンラインで⾏う (RMSprop) • 逆温度 β = 1とすれば事後分布からのサン プリング、β を更新ごとに徐々に上げてい き∞とすればMAP推定 (焼きなまし) これは次の不変分布を持つ
22.
Leapfrog法再考 Leapfrog法は元の運動⽅程式を2つに分解し て、交互に解析的に解いていると思える 22 ナイーブな⽅法 離散化 離散化 分解 Leapfrog法
23.
Symmetric Splitting [Chen+15a]
[Chen+15b] [Chen+15c] Leapfrog法と同様に、運動⽅程式を⽅程式の和 に分解し各々を順番に解析的に解く SGHMCの場合 [Chen+15a] 23 これを3つに分解して A(h/2) → B(h/2) → O(h) → B(h/2) → A (h/2) の順に解析的に解く [Chen+15b]でmSGNHTに、[Chen+15c]でSantaにSSを 適⽤している Baker-Campbell-Hausdorffの公式を使って離散化による 近似誤差がO(h2)→O(h3)になることが証明できる
24.
統⼀的な理解 [Shi+12][Ma+15] これまでに出したHMC, SGHMC,
SGLD, SGRLD, (m)SGNHT, Santaはすべて同⼀の表式でかける 24 この運動⽅程式は逆温度 β のカノニカル分布を定常分布に持つ [Ma+15]では、パラメータD, Qとして特別の値を⼊れて、新しいサンプリングアルゴリズム SGRHMC, gSGRHMCを提案している
25.
25
26.
実験 モデル • パラメータ:θ =
(θ1, θ2) • 事前分布:p(θ) = (N(0, 10), N(0, 1)) • ⽣成:p(x | θ) = N(θ1, 2)/2 + N(θ1+θ2, 2)/2 問題設定 • θ = (0, 1)として100サンプルをiidで⽣成 • 事前分布と⽣成⽅法はわかっているとしてパラ メータの事後分布 p(θ | X) を推定 • 事後分布は (0, 1)と(1, -1)にモードがある⼆峰 性の⼭になる 26 ⼿法 • HMC, SGHMC, SGLD, mSGNHT • HMCは勾配の計算に100サンプル使⽤、それ 以外は10サンプルずつミニバッチで使⽤ 対数尤度の勾配 -∇log p(θ | x) はChainerで⽣成 モデルを作ってback propで計算 ⼀昨⽇1.6.0が出ました
27.
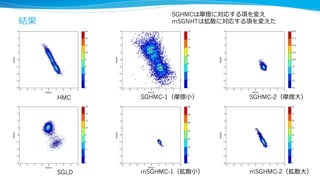
結果 27 HMC SGHMC-1(摩擦⼩) SGHMC-2(摩擦⼤) SGLD
mSGHMC-1(拡散⼩) mSGHMC-2(拡散⼤) SGHMCは摩擦に対応する項を変え mSGNHTは拡散に対応する項を変えた
28.
まとめ 28 HMC SGHMC SGLD SGNHT mSGNHT Santa RMSprop SGRLD 勾配を推定値 に置き換える フィッシャー 計量の導⼊ 摩擦→∞
サーモスタット パラメータの導⼊ 各次元に サーモスタット 幾何情報の 推定⽅法の輸⼊ ⾮ユークリッド化 + 焼きなまし SGRHMC gSGRHMC フィッシャー 計量の⼀般化 フィッシャー 計量導⼊
29.
Copyright © 2014- Preferred
Networks All Right Reserved.
Download










![HMC [Neal11]
古典的な運動⽅程式を考える
13
これを変形すると、
これを離散化すれば、
アルゴリズム](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-13-320.jpg)

![SGHMC[Chen+14]
じゃあHMCで-∇θU(θ)を単純に推定値に置
き換えれば良いか? → NO
16
左下の更新則は次の確率微分⽅程式を離散
化したもの
p(θ, p | X) ∝ exp(-U(φ) – K(p)) はこの運
動⽅程式の不変分布にならない
これは次の更新則と同等(になってしまっ
ている)
推定値を⽤いたHMCの更新則
V(θ) : サブサンプリングに伴う分散
ζのサンプリングは実際には⾏っていない](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-16-320.jpg)
![SGHMC[Chen+14]
そこで、同時分布が不変分布になるように、運
動⽅程式⾃体を変えてしまう
17
B(θ) = hV(θ)/2と置き直した
この⽅程式は2次のLangevin Dynamicと呼ばれ
ている。これを離散化すると、
実際には、サブサンプリングによる分散B(θ)が
求まらない。論⽂ではこれを推定値B^に置き換
え、C>Bとなる係数を⽤いて系をコントロール
するなどの⼯夫をしている
さらにもう⼀段⼯夫すると、アルゴリズムは、
次のようになる](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-17-320.jpg)
![SGLD[Welling+11], SGRLD[Patterson+13]
SGLDの運動⽅程式は1次のLangevin Dynamics
18
SGHMCの2次のLangevin Dynamicsで
B→∞とした極限として得られる
SGLDのアルゴリズム
SGRLDは1次のLangevin DynamicsにFisher計量から
くるパラメータ空間の幾何的な情報を加える
G(θ)はフィッシャー⾏列の逆⾏列](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-18-320.jpg)
![SGNHT[Ding+14]
系の温度をコントロールするサーモスタット
のパラメータ ξ を⽤意し、摩擦をコント
ロールする
19
アルゴリズム
背景となるのは以下の計算
K(p) = pTp/2
Zkは p(p) ∝ exp(-K(p))の分配関数](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-19-320.jpg)
![mSGNHT[Gan+15]
サーモスタットに対応するパラメータ ξ を運動
量の各次元に⽤意する
20
アルゴリズム](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-20-320.jpg)

![Symmetric Splitting [Chen+15a] [Chen+15b] [Chen+15c]
Leapfrog法と同様に、運動⽅程式を⽅程式の和
に分解し各々を順番に解析的に解く
SGHMCの場合 [Chen+15a]
23
これを3つに分解して
A(h/2) → B(h/2) → O(h) → B(h/2) → A (h/2)
の順に解析的に解く
[Chen+15b]でmSGNHTに、[Chen+15c]でSantaにSSを
適⽤している
Baker-Campbell-Hausdorffの公式を使って離散化による
近似誤差がO(h2)→O(h3)になることが証明できる](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-23-320.jpg)
![統⼀的な理解 [Shi+12][Ma+15]
これまでに出したHMC, SGHMC, SGLD, SGRLD, (m)SGNHT, Santaはすべて同⼀の表式でかける
24
この運動⽅程式は逆温度 β のカノニカル分布を定常分布に持つ
[Ma+15]では、パラメータD, Qとして特別の値を⼊れて、新しいサンプリングアルゴリズム
SGRHMC, gSGRHMCを提案している](https://image.slidesharecdn.com/sgmcmcpublic-160125014006/85/Stochastic-Gradient-MCMC-24-320.jpg)




















![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]A Bayesian Perspective on Generalization and Stochastic Gradient Descent](https://cdn.slidesharecdn.com/ss_thumbnails/20171106dl2-171108033614-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]ICLR2020の分布外検知速報](https://cdn.slidesharecdn.com/ss_thumbnails/iclr2020ood-190927011524-thumbnail.jpg?width=640&height=640&fit=bounds)















![集中不等式のすすめ [集中不等式本読み会#1]](https://cdn.slidesharecdn.com/ss_thumbnails/concentrationintro-150128034517-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Deep Learning for Sampling from Arbitrary Probability Distributions](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks0216-180219071029-thumbnail.jpg?width=640&height=640&fit=bounds)


















































