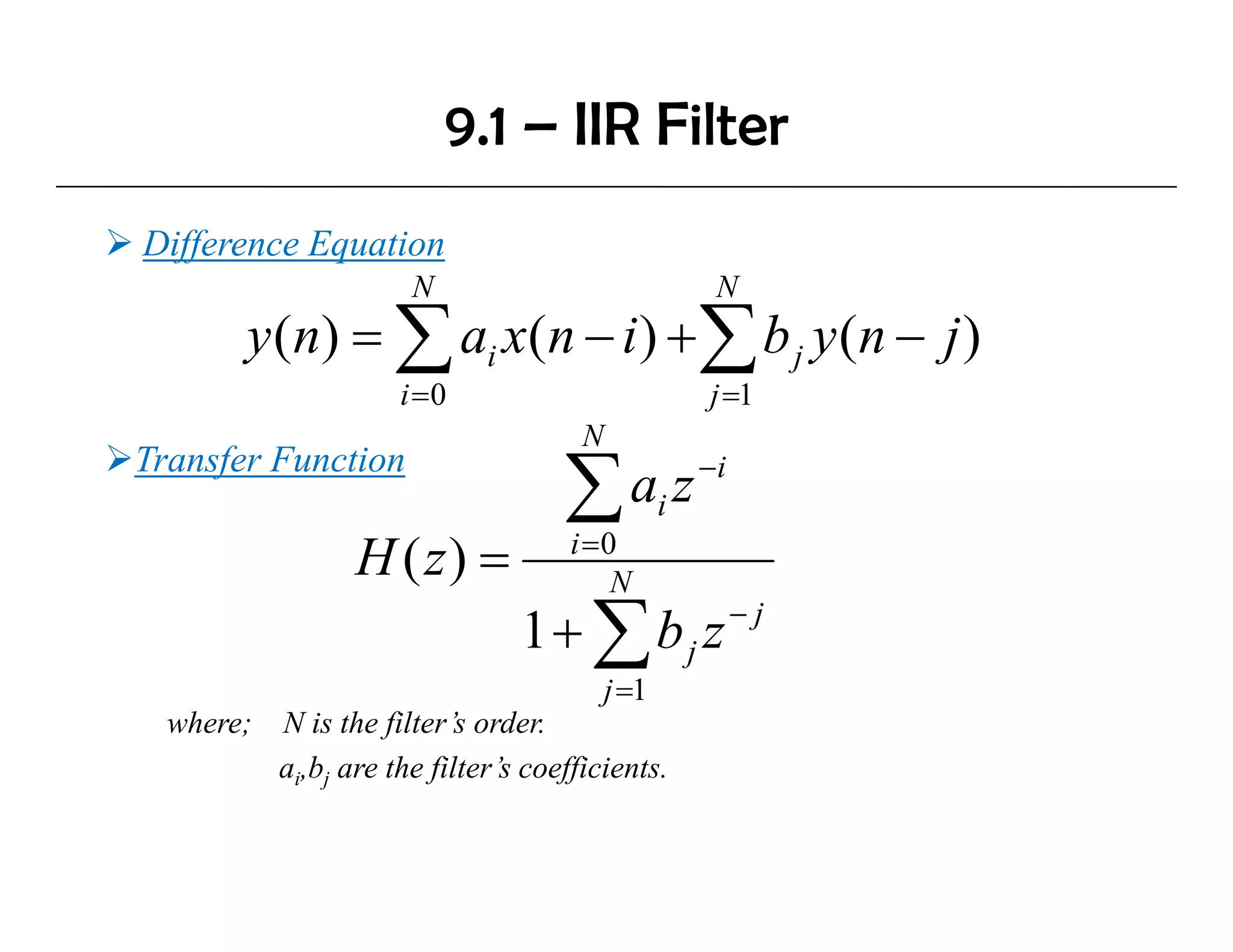
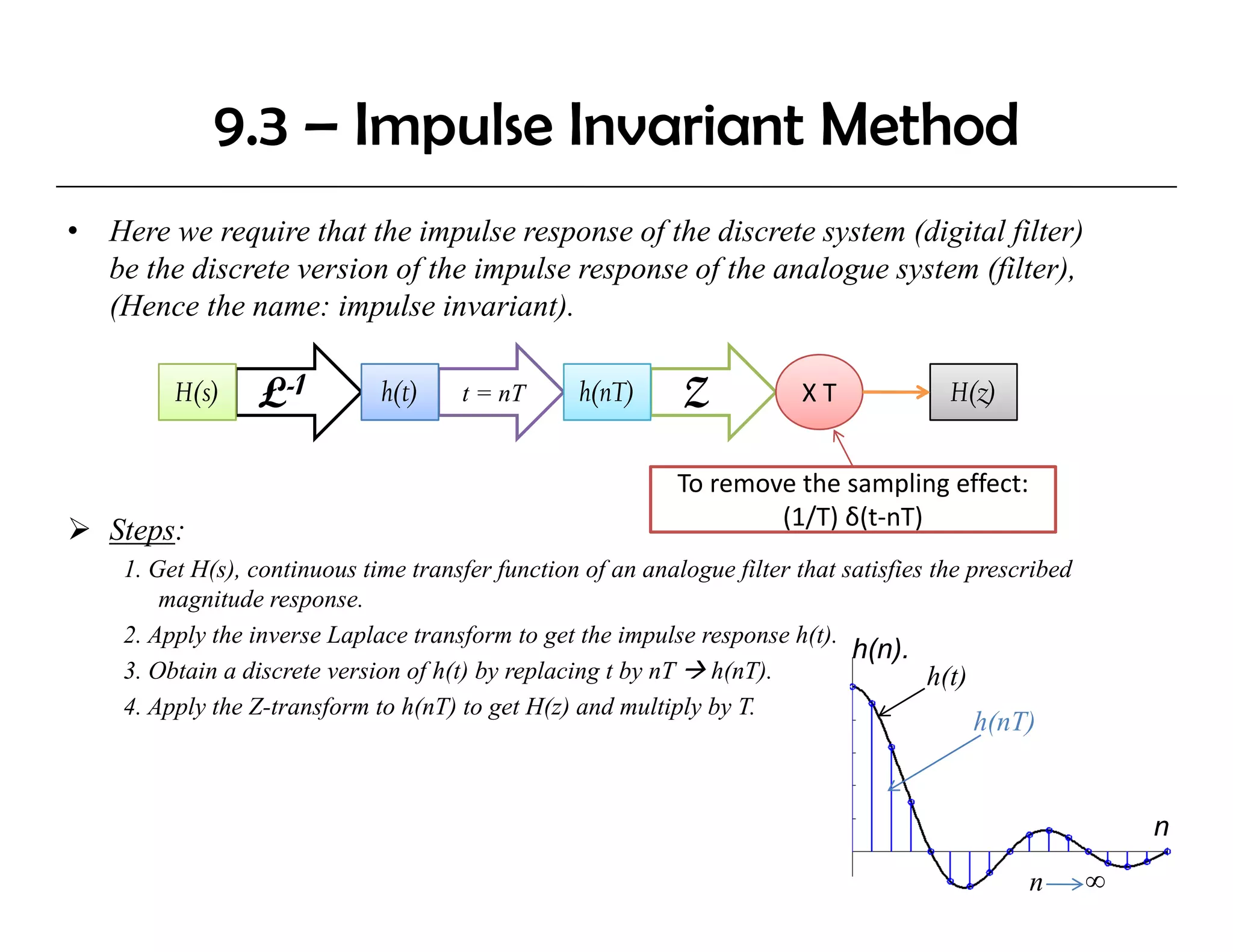
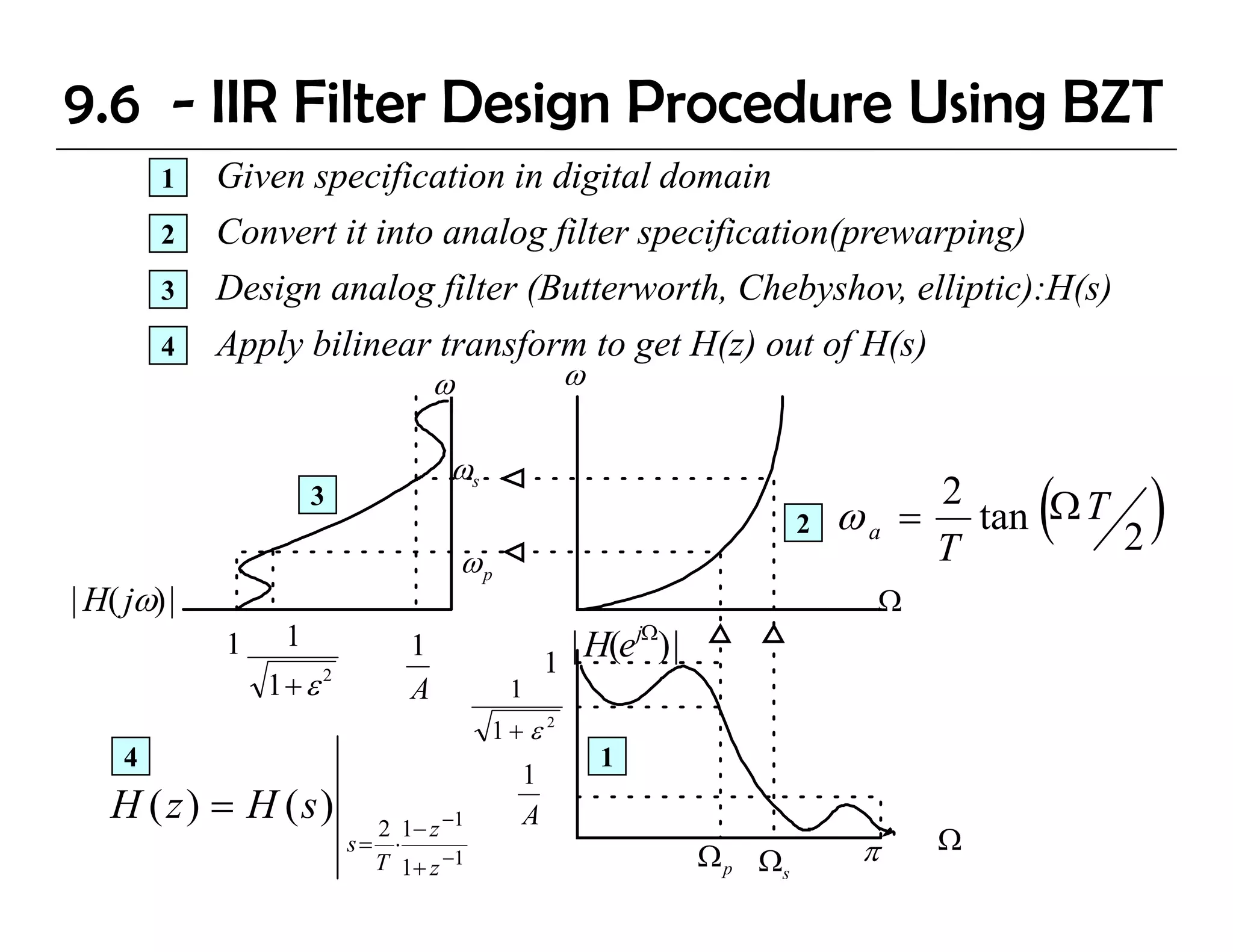
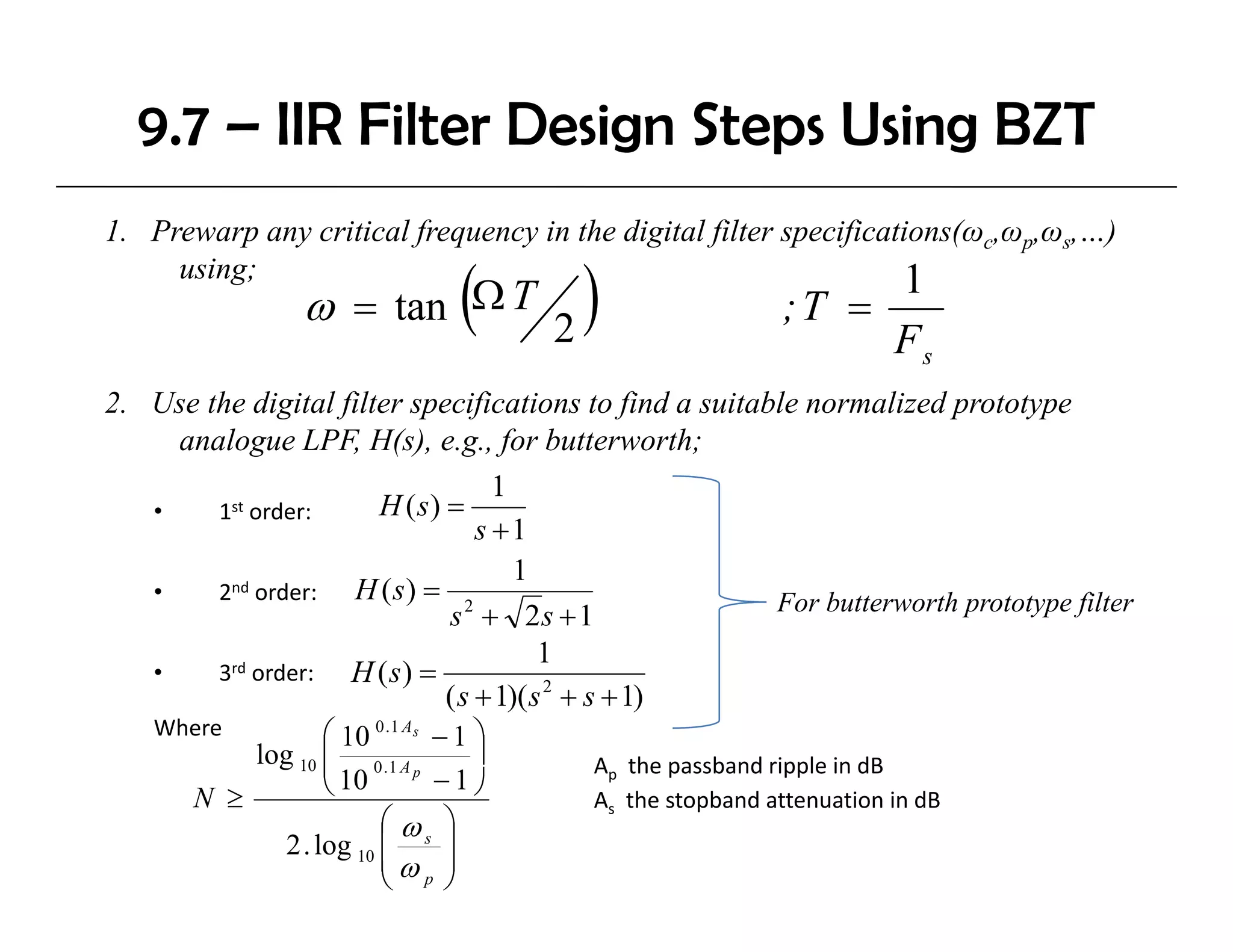
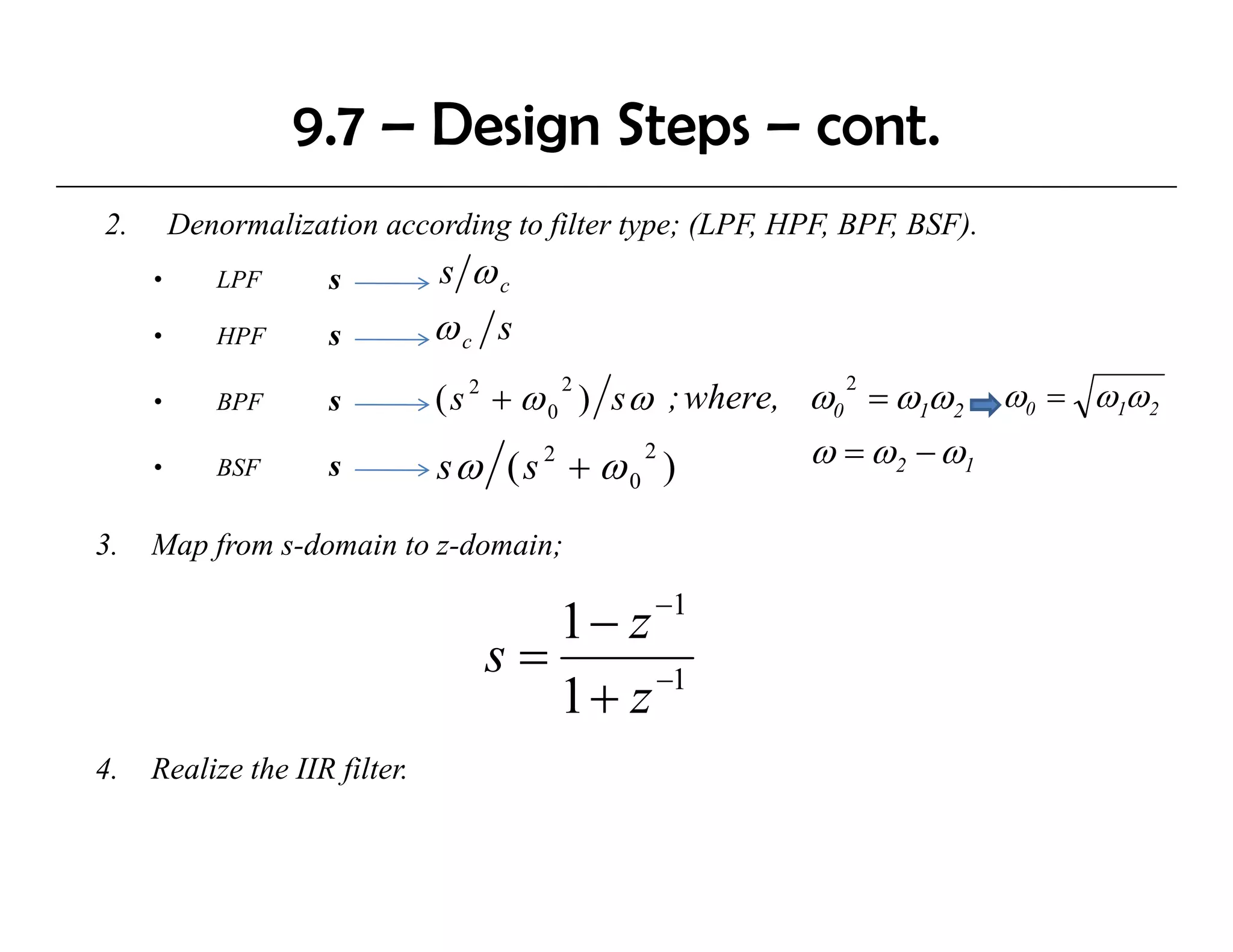
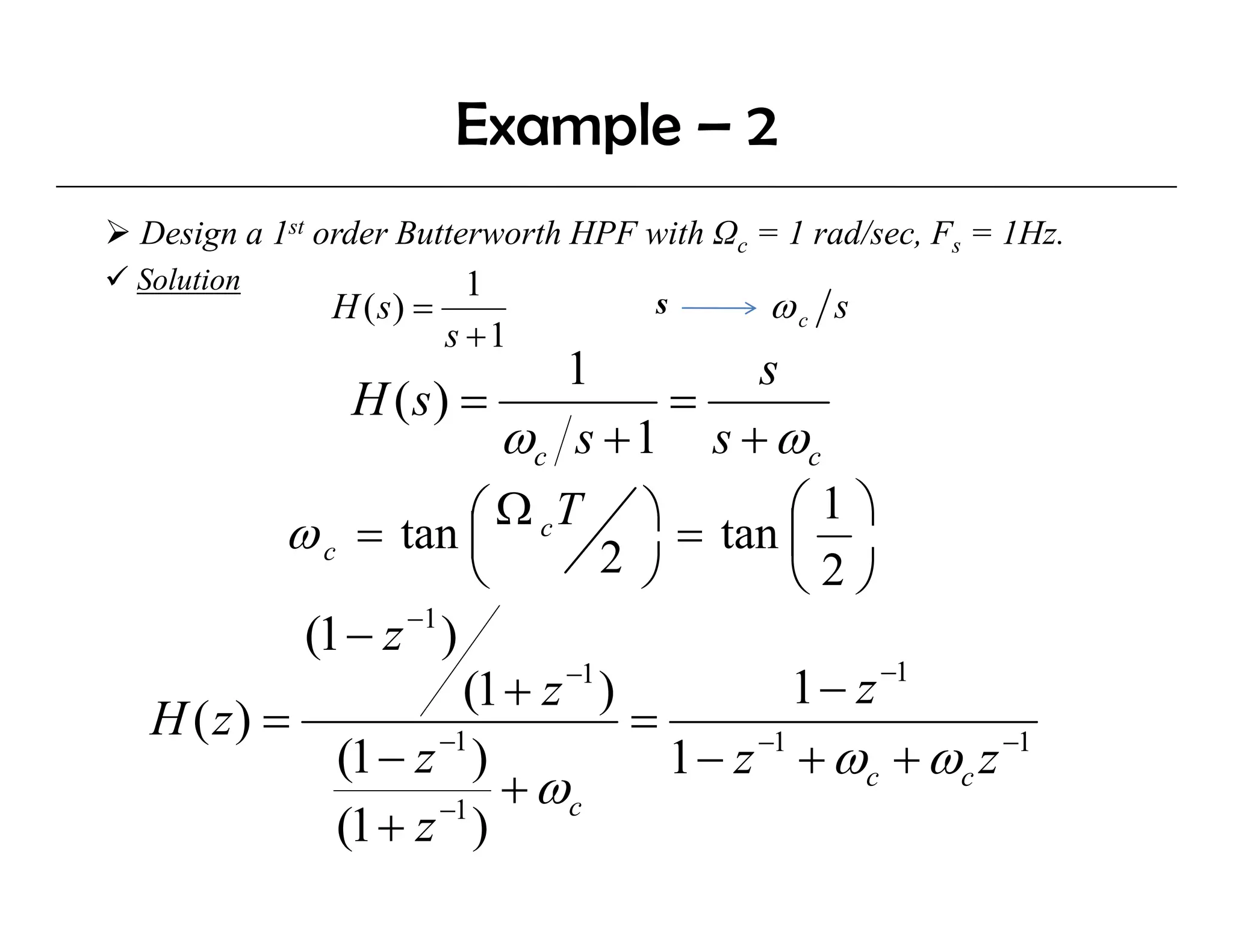
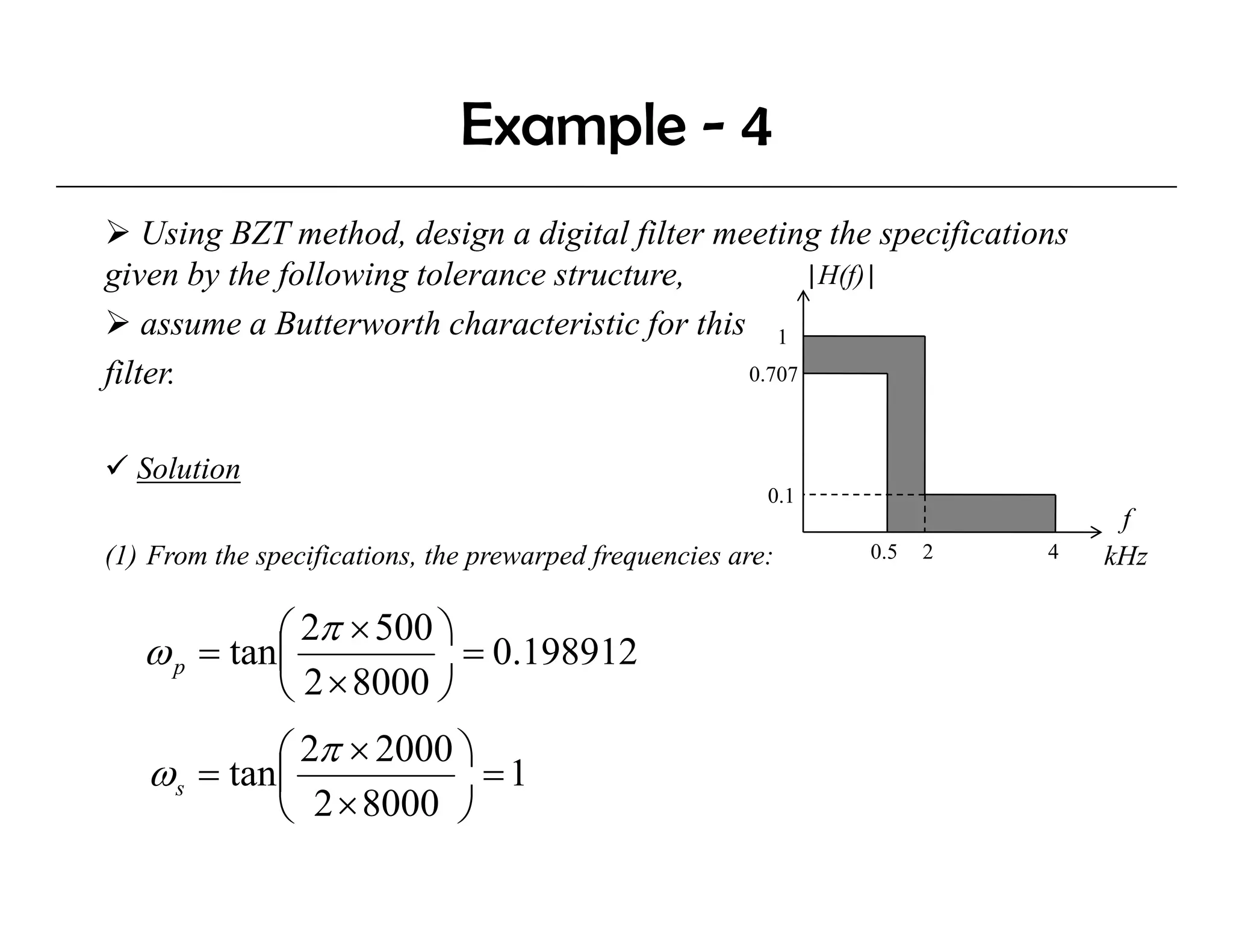
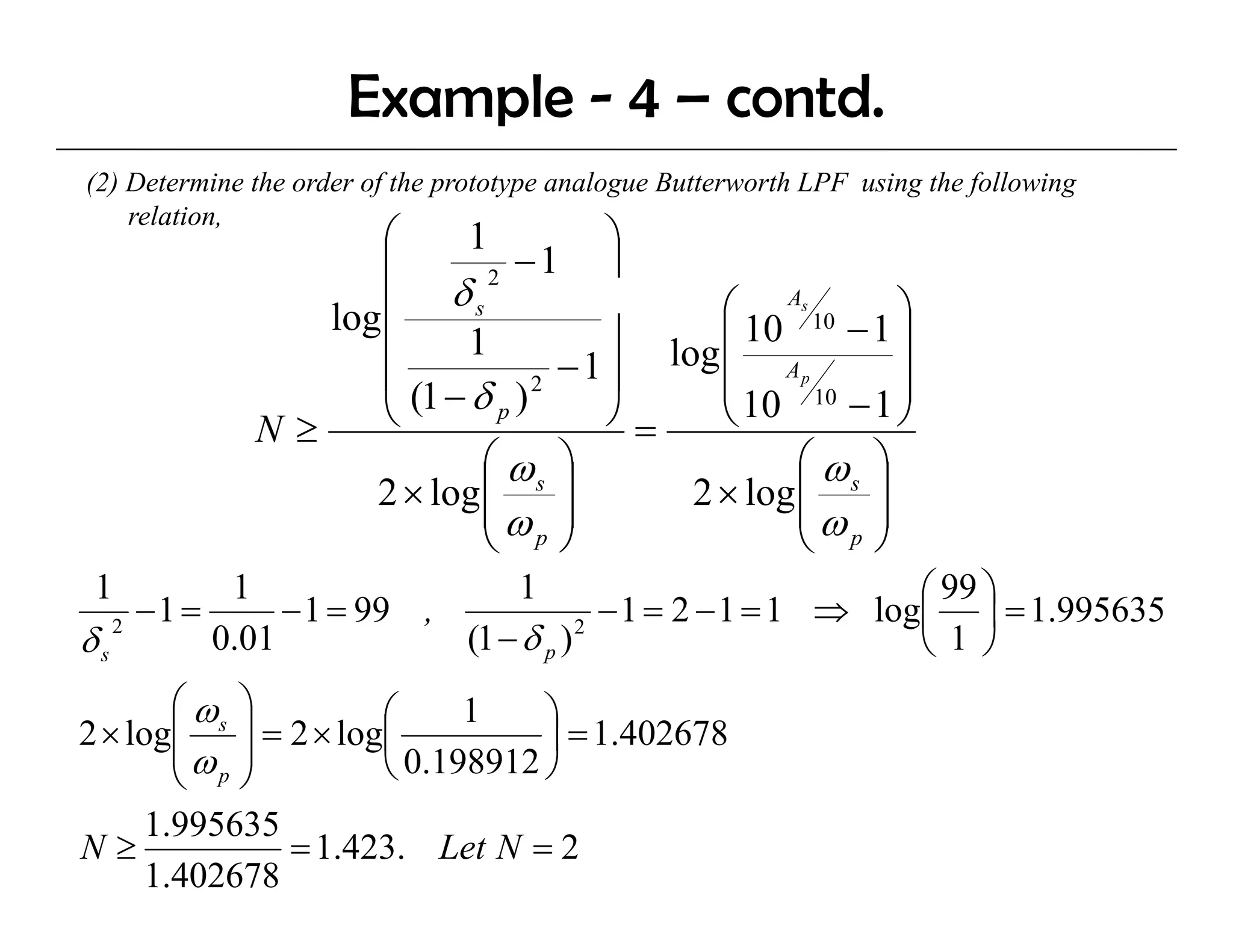
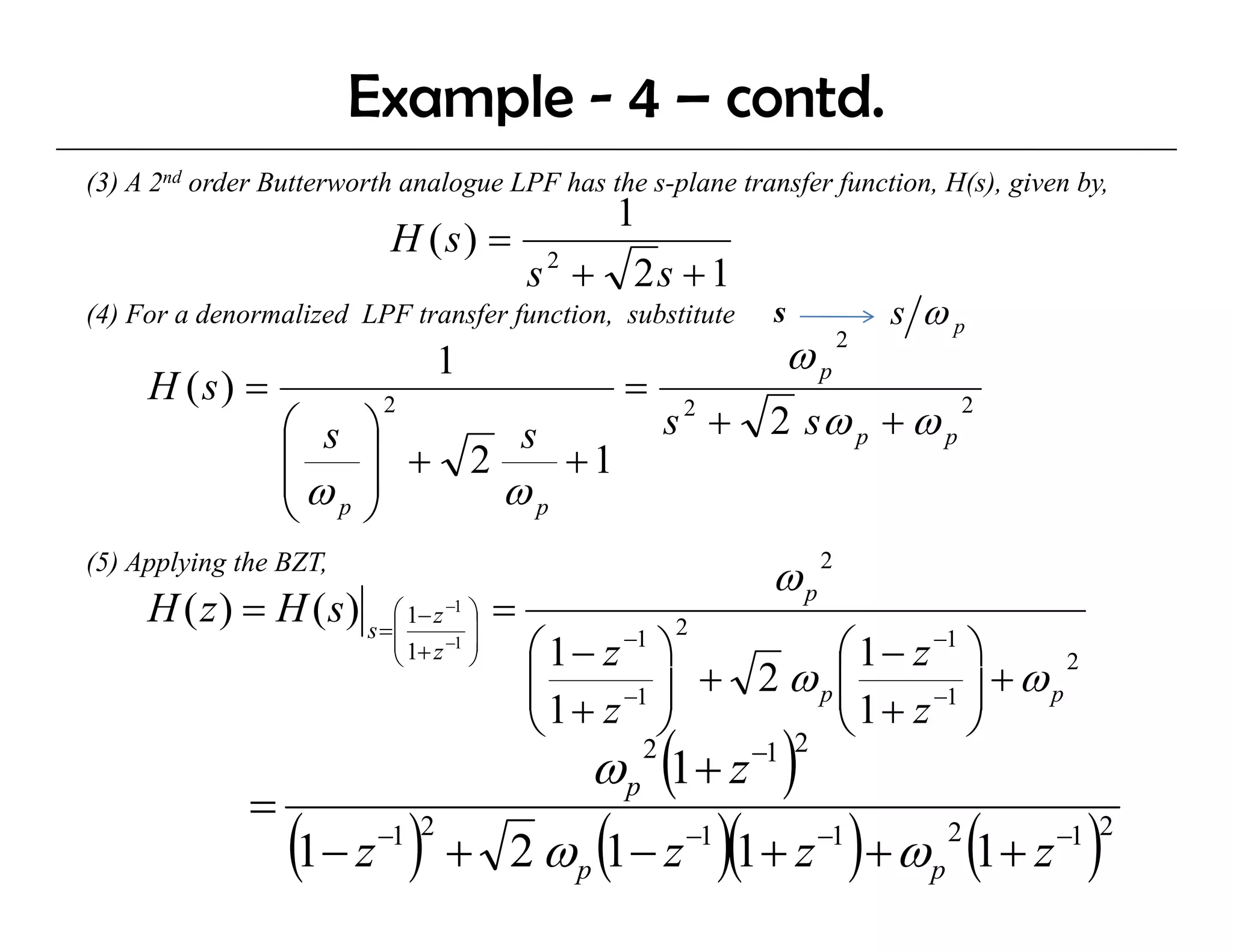
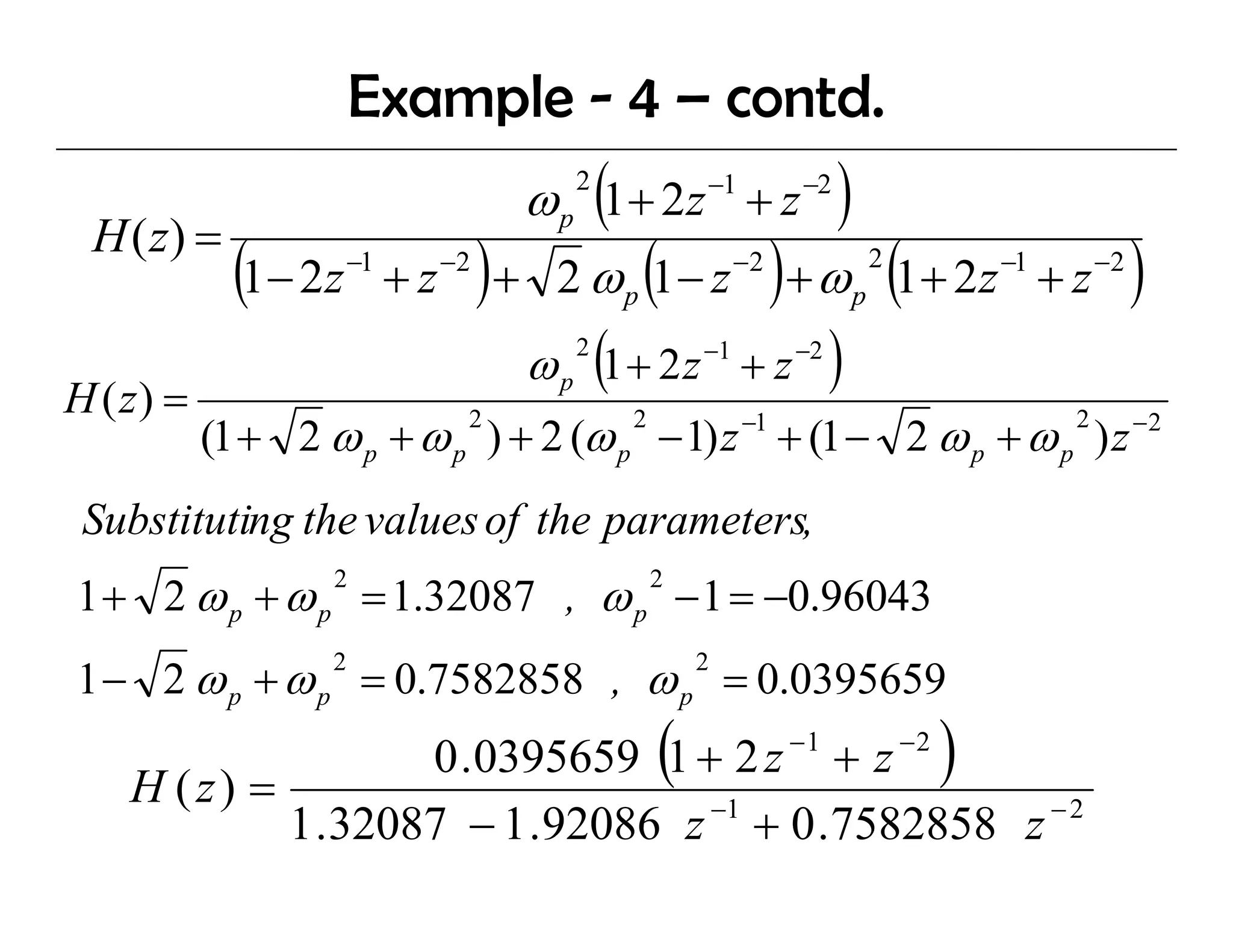
The document discusses the design of IIR digital filters using different methods. It begins by describing the difference equation and transfer function of IIR filters. It then covers the Impulse Invariant Method and Bilinear Z-Transform (BZT) Method for designing IIR filters by transforming analog prototypes. Key steps include prewarping frequencies, designing analog filters, and applying the bilinear transform. Examples demonstrate applying these methods to design Butterworth filters.
![Example - 1
Using the invariant impulse response method, design a digital
filter that has the shown pole-zero distribution. jω
x ω0
Solution
s+a
H (s) = σ
[ s + ( a + jω 0 )][ s + ( a − jω 0 )] ‐a
s+a
H (s) = x - ω0
[( s + a ) + ω 0 )]
2 2
−1
(1) L {H ( s)} = e − at
cos(ω0t ) = h(t )
(2) h(nT) = e − anT
cos(ω0 nT )
1 − e − aT cos( ω 0T ) z −1
(
(3) T × Z{ h(nT)} = ×T
1 − 2e cos( ω 0T ) z + e
− aT −1 − 2 aT − 2
z
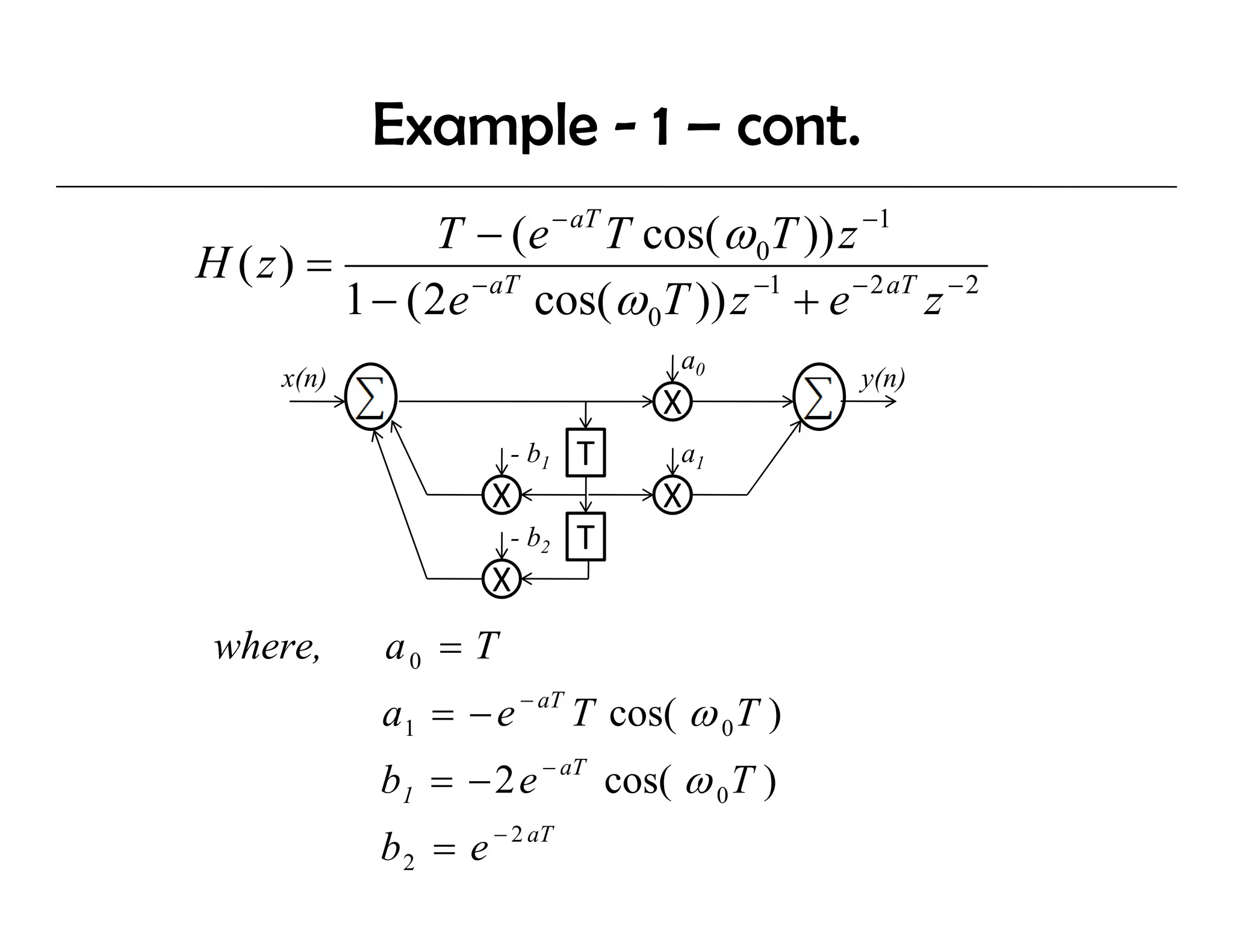
T − (e − aT T cos( ω 0T )) z −1
H ( z) =
1 − ( 2e − aT cos( ω 0T )) z −1 + e − 2 aT z − 2](https://image.slidesharecdn.com/dsp-u-lec09iirfilterdesign-100105085546-phpapp01/75/Dsp-U-Lec09-Iir-Filter-Design-6-2048.jpg)










![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)