Download as PDF, PPTX








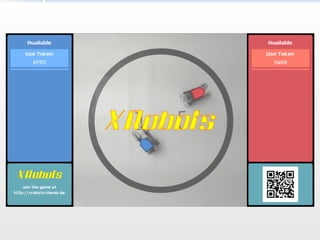
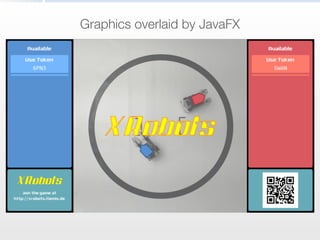
![JavaFX
• Now included in the JRE
• Create graphics and sound effects
• Use CSS to specify visual properties
children += new Label => [
text = 'XRobots'
styleClass += #['boxed-label', 'logo']
effect = new InnerShadow => [
color = Color.RED
width = 3.2
height = 3.2
]
]
.boxed-label {
-fx-background-radius: 3.0;
-fx-padding: 4.0;
-fx-text-fill: white;
}](https://image.slidesharecdn.com/xrobots-150312172438-conversion-gate01/85/XRobots-55-320.jpg)




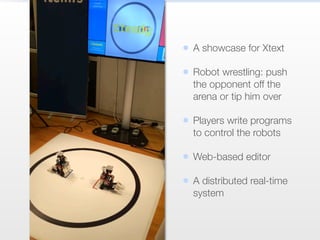
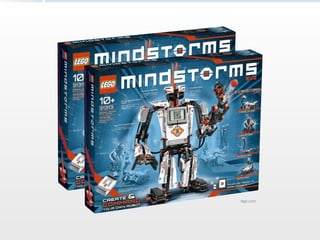
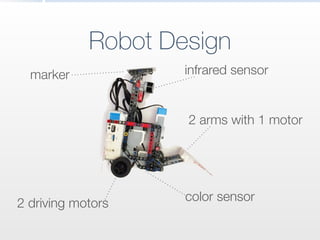
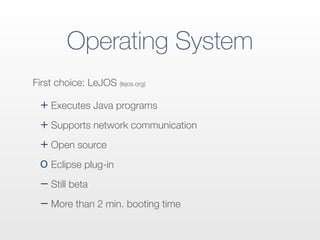
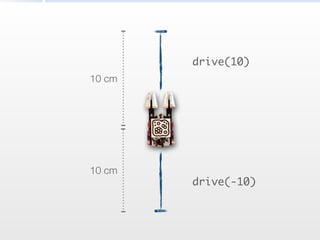
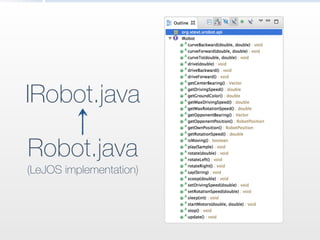
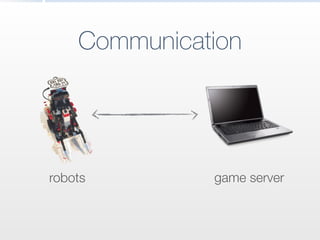
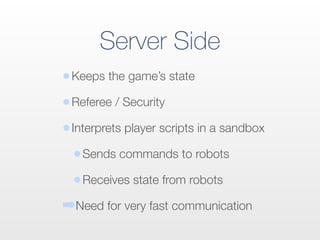
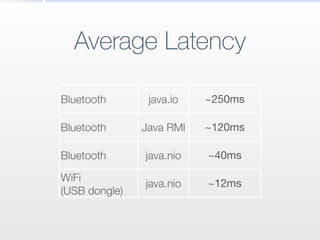
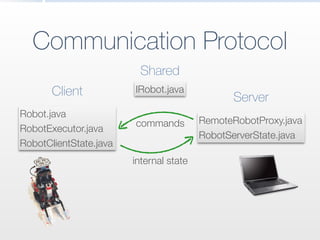
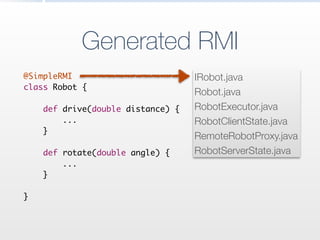
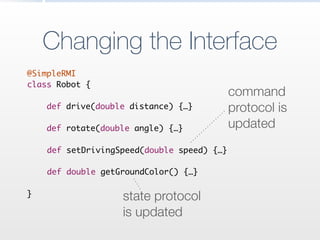
This document describes the development of XRobots, a robot wrestling game where players write programs to control robots. It discusses the robot hardware which uses Lego Mindstorms EV3 kits with motors, sensors, and Bluetooth connectivity. An operating system runs the Java-based robot API to control movement and sensors. A game server facilitates networked communication between robots and handles game state and security. Xtext is used to define a programming language and web editor for writing robot control scripts. JavaFX provides graphics and OpenCV enables robot vision processing. The goal is to create an engaging and secure platform for programming and playing with robot battles.