This document is a final project paper submitted by Frantz St Valliere for an Applied Software Technology course. It details the creation of a Segway robot using a LEGO Mindstorms NXT kit. It describes the sensors used like the gyroscopic sensor to enable balancing. It explains how the robot was programmed in Java using the Eclipse IDE to control the sensors and motors to replicate the functions of a real Segway. The code allows the robot to balance on two wheels and back up or turn when objects are near.




![download the LeJOS NXJ operating system. This operating system lives on Java programming.
Using the LeJOS operating system, we can flash the NXT intelligence brick to work with Java.
This will remove the NXT-G operating system and will be replaced with the LeJOS NXJ.
Flashing the intelligence brick can be done within Eclipse with the right files installed. If
successful, you can test the simplest program “Hello World.”
This will display “Hello World!” on the LCD screen. This result will earn the access
to other programming capabilities which of course will be the Segway program.
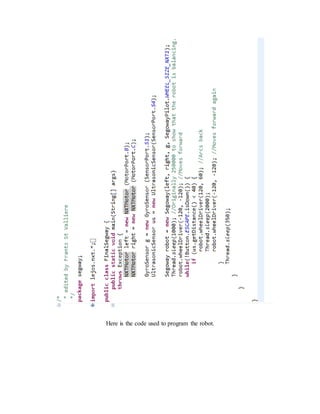
The Segway program is not as simple as the Hello World program. In fact we have to
incorporate all the sensors available to make the NXT robot work the way it should. In the
program, the sensors and motors have to be initialized. In the program we have two sensors and
two different motors. The robot uses the ultrasonic sensor to provide protection between the
robot and the item it approaches. To initiate the ultrasonic sensor we need to write this line of
code: UltrasonicSensor us = new UltrasonicSensor(SensorPort.S4);. This will activate the
sensor as well as the port connected to the NXT intelligence brick. The keyword new creates a
class for the ultrasonic sensor. That way in line 20 (if (us.getDistance() < 40)) we can use
the dot operator to manipulate the variable “us”. This is similar to C++ except in C++ we are
forced to created public and private variables in a class. Line 20 controls the distance between
//Lab_0_HelloWorld
import lejos.nxt.*;
public class HelloWorld
{
public static void main (String[]args)
{
System.out.printIn(“Hello World!”); //Displays the string on the screen
Button.waitForPress();//Button press ends the program
}
}](https://image.slidesharecdn.com/b57313eb-fe05-4b1e-a8a2-5edb843e3002-150703214323-lva1-app6891/85/Final-Project-5-320.jpg)

![[UIST2013] MagGetz: Customizable Passive TangibleControllers on and around Co...](https://cdn.slidesharecdn.com/ss_thumbnails/uist2013maggetz-141123090741-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)