INTRODUCTION TO ROBOTICS
Robotics is the Science & Technology that deals
with the design, construction, operation and
applications of robots. i.e. the branch of
technology that deals with robots is called robotics
3.
ROBOT
Robot isa Reprogrammable, Multi functional
Device designed to perform variety of tasks
Robot consist of Electrical , Electronic &
Mechanical Units
4.
Why Robots
Speed
Robotsmay be used because they are FASTER than
people at carrying out tasks.
Hazardous (dangerous) Environments
Robots may be used because they can work in
places where a human would be in danger. For
example, robots can be designed to withstand
greater amounts of heat , radiation, chemical
fumes than humans could.
5.
Why Robots
RepetitiveTasks
Robots are good at simply doing the same job over
and over again. This is easy for a robot, because
once the robot has been programmed to do a job
once, the same program can be run many times to
carry out the job many times. And the robot will not
get bored as a human would.
6.
Why Robots
Efficiency
Efficiencyis all about carrying out tasks without
waste. This could mean not wasting time ,not
wasting materials ,not wasting energy
Accuracy
Accuracy is all about carrying out tasks very
precisely. In a factory manufacturing items, each
item has to be made identically. When items are
being assembled, a robot can position parts within
fractions of a millimeter.
7.
Why Robots
Adaptability
Adaptabilityis where a certain robot can be used to
carry out more than one task. A simple example is a
robot being used to weld car bodies. If a different
car body is to be manufactured, the program which
controls the robot can be changed. The robot will
then carry out a different series of movements to
weld the new car body.
8.
Advantages
ability towork fast
ability to work in a hazardous
environment
ability to repeat tasks again and again
ability to work accurately
efficiency
ability to do different jobs
Robots can process multiple tasks
simultaneously
Robots increase productivity, safety, efficiency, quality, and
consistency of products
9.
Disadvantages
Robots lackcapability to respond in emergencies.
Robots, although superior in certain senses, have
limited capabilities in Degree of freedom, Dexterity,
Sensors, Vision system, real time response.
Robots are costly, due to Initial cost of equipment,
Installation costs, etc..
10.
Robot Application
Machineloading / Unloading
Pick and place operations
Welding
Painting
Sampling
Assembly operation
Manufacturing
Surveillance
Medical applications
Assisting disabled individuals
Hazardous environments
Underwater, space, and remote locations
11.
History of Robot
Word robot was coined by a Czech novelist Karel Capek
in a 1920 play titled Rassum’s Universal Robots (RUR)
Robot in Czech is a word for worker or servant
The first industrial robot
UNIMATE
1954: The first programmable robot is designed by
George Devol, who coins the term Universal
Automation. He later shortens this to Unimation, which
becomes the name of the first robot Company (1962).
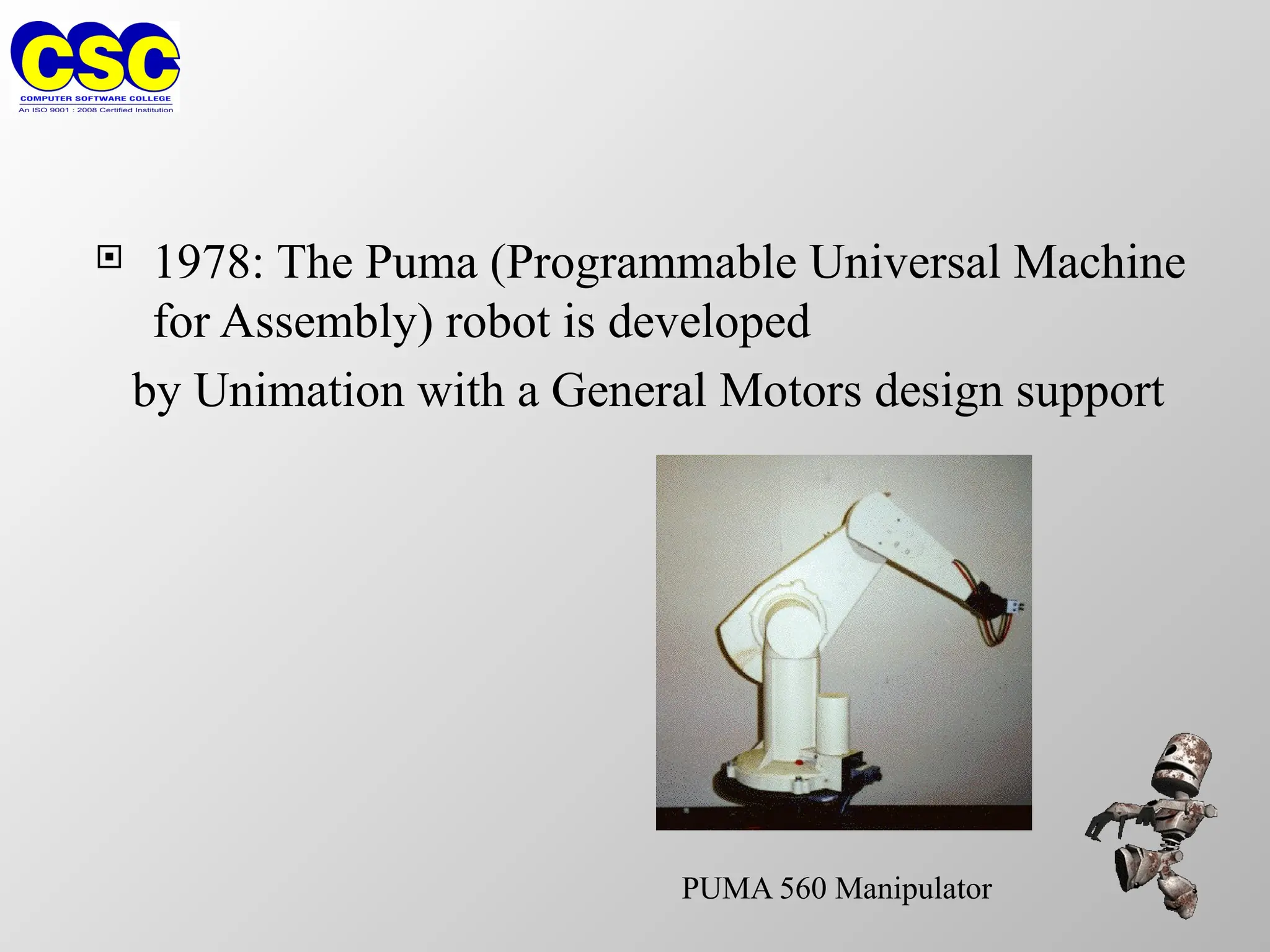
1978: ThePuma (Programmable Universal Machine
for Assembly) robot is developed
by Unimation with a General Motors design support
PUMA 560 Manipulator
14.
1980s: Therobot industry enters a phase of rapid
growth. Many institutions introduce programs and
courses in robotics. Robotics
courses are spread across mechanical engineering,
electrical engineering, and computer science
departments.
1995-present: Emerging applications in small
robotics and mobile robots drive a second
growth of start-up companies and research
15.
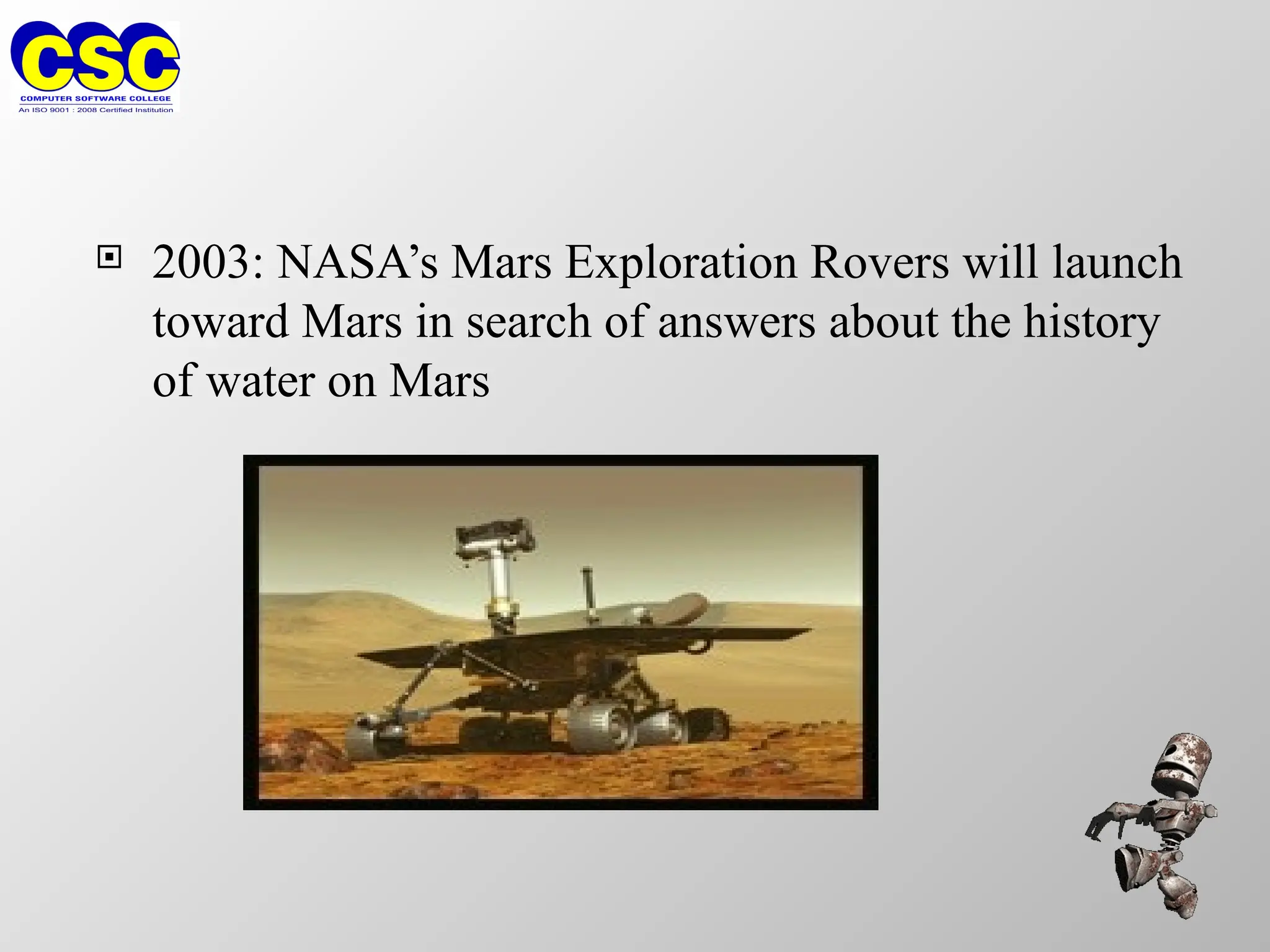
2003: NASA’sMars Exploration Rovers will launch
toward Mars in search of answers about the history
of water on Mars
16.
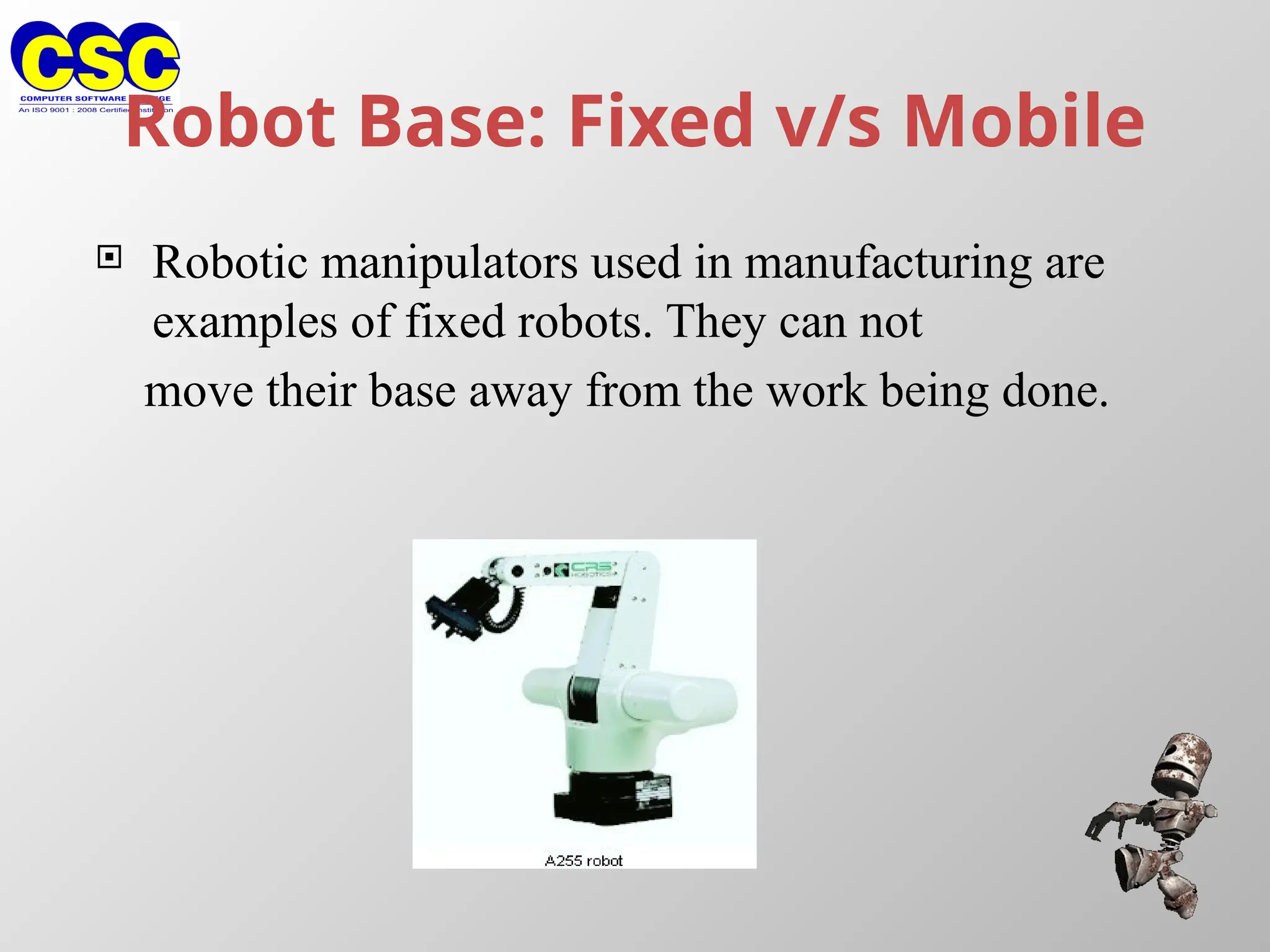
Robot Base: Fixedv/s Mobile
Robotic manipulators used in manufacturing are
examples of fixed robots. They can not
move their base away from the work being done.
17.
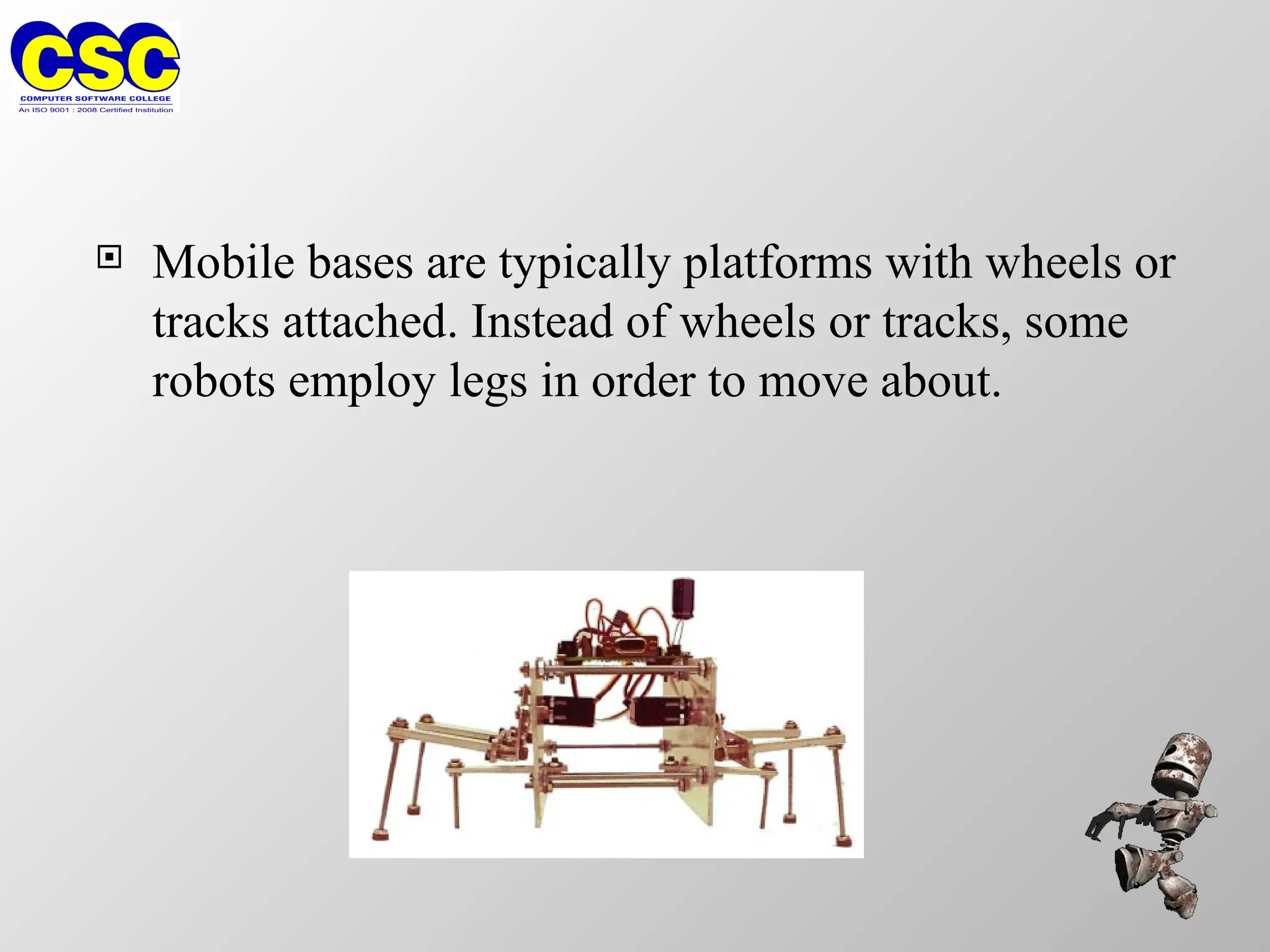
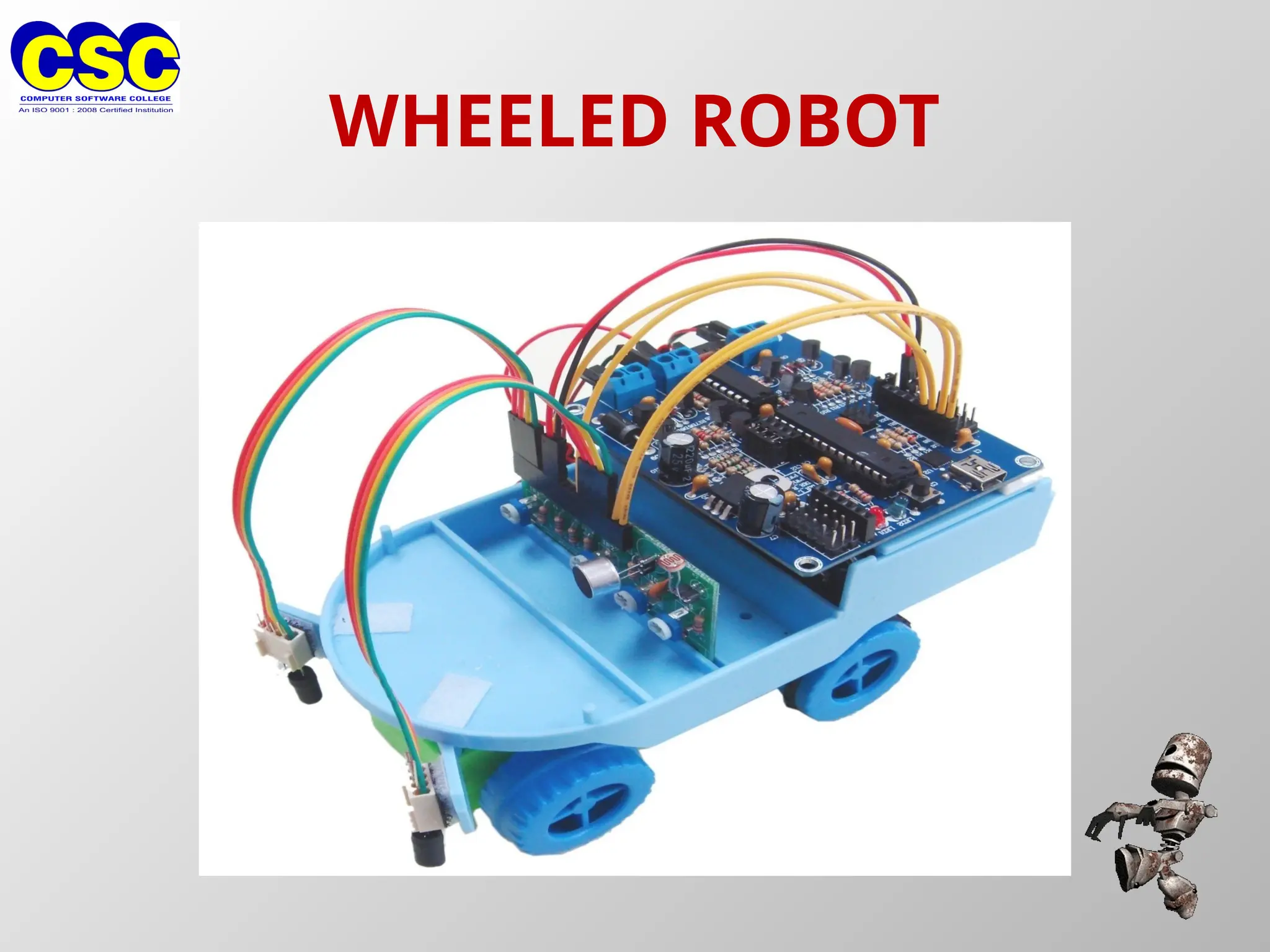
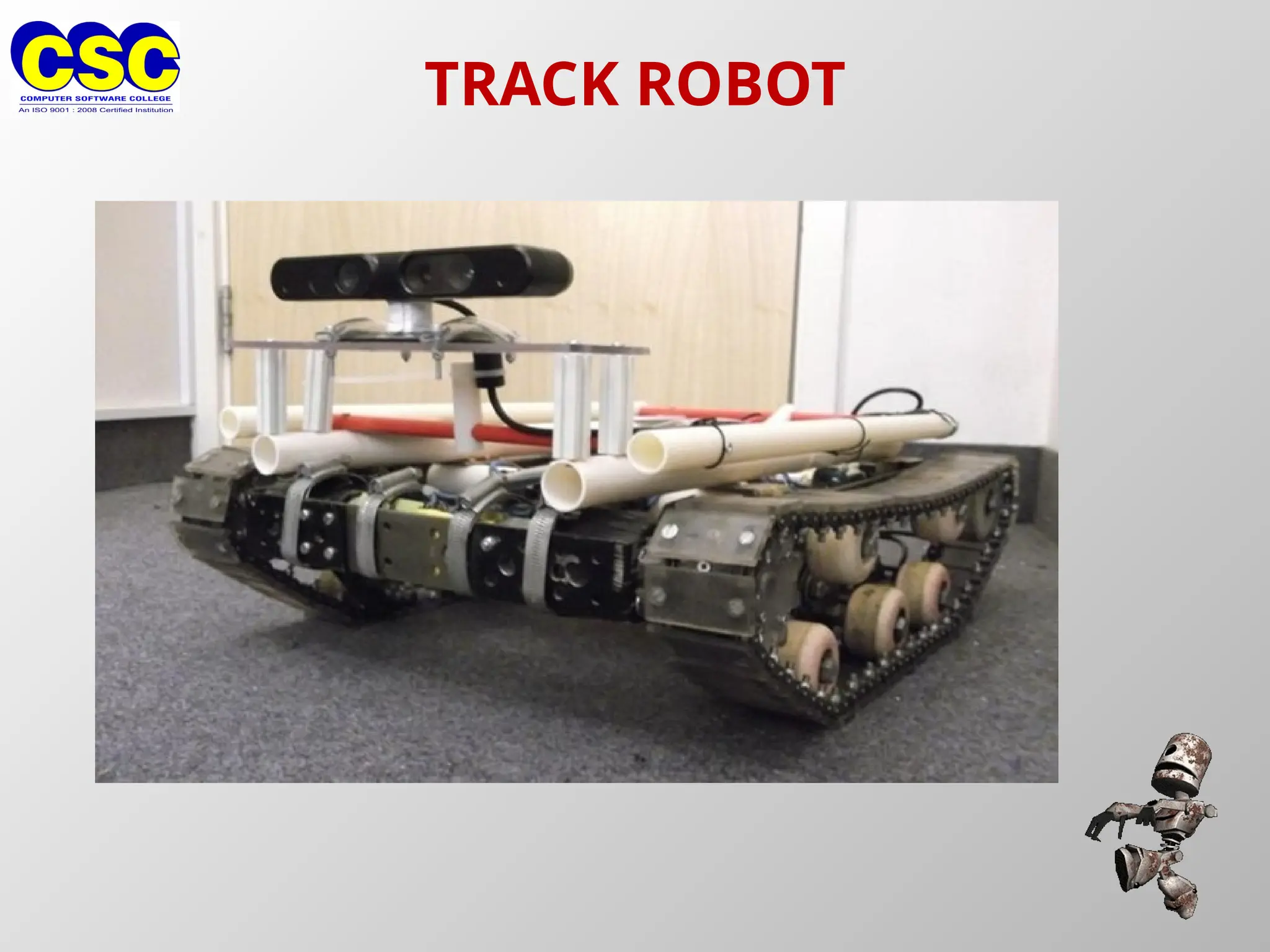
Mobile basesare typically platforms with wheels or
tracks attached. Instead of wheels or tracks, some
robots employ legs in order to move about.
Laws of Robotics
Law 1:
A robot may not injure a human being or through inaction,
allow a human being to come to harm
Law 2:
A robot must obey orders given to it by human beings, except
where such orders would conflict with a higher order law
Law 3:
A robot must protect its own existence as long as such
protection does not conflict with a higher order law
SENSORS
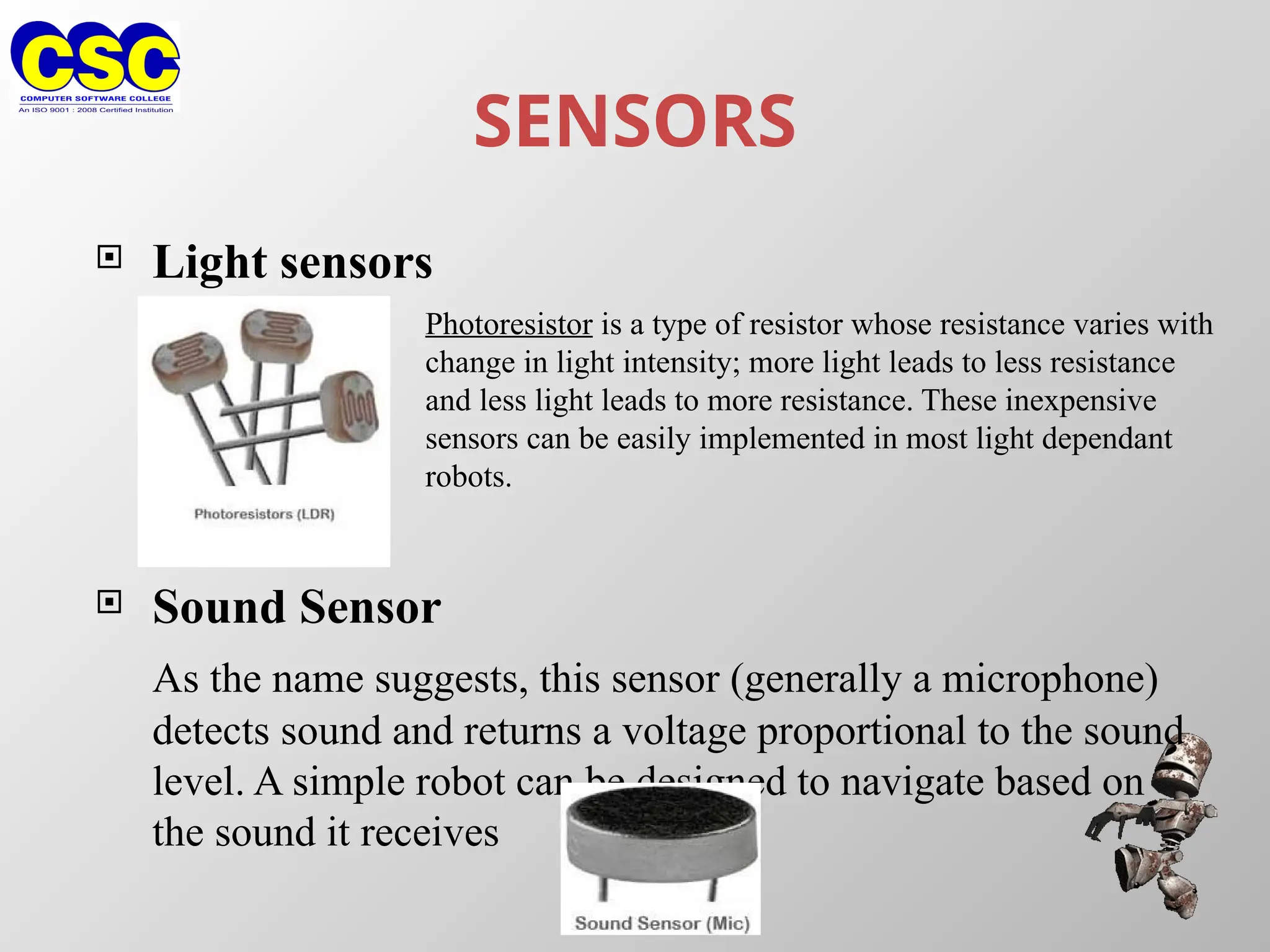
Light sensors
Sound Sensor
As the name suggests, this sensor (generally a microphone)
detects sound and returns a voltage proportional to the sound
level. A simple robot can be designed to navigate based on
the sound it receives
Photoresistor is a type of resistor whose resistance varies with
change in light intensity; more light leads to less resistance
and less light leads to more resistance. These inexpensive
sensors can be easily implemented in most light dependant
robots.
27.
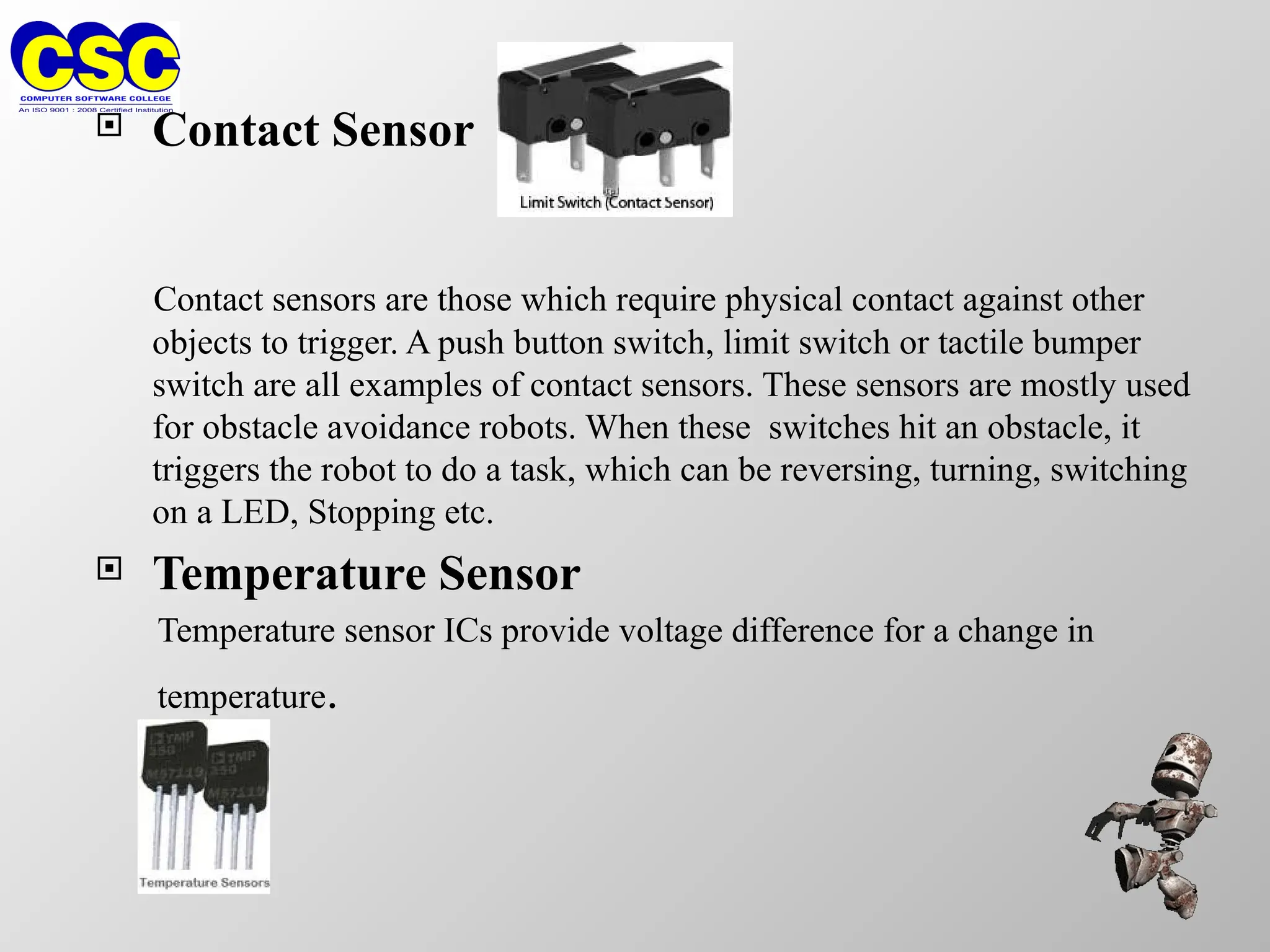
Contact Sensor
Contactsensors are those which require physical contact against other
objects to trigger. A push button switch, limit switch or tactile bumper
switch are all examples of contact sensors. These sensors are mostly used
for obstacle avoidance robots. When these switches hit an obstacle, it
triggers the robot to do a task, which can be reversing, turning, switching
on a LED, Stopping etc.
Temperature Sensor
Temperature sensor ICs provide voltage difference for a change in
temperature.
28.
Proximity Sensor
Thisis a type of sensor which can detect the presence of a nearby object within a given
distance, without any physical contact. The working principle of a Proximity sensor is
simple. A transmitter transmits an electromagnetic radiation or creates an electrostatic
field and a receiver receives and analyzes the return signal for interruptions. There are
different types of Proximity sensors and few of them which are generally used in robots.
Infrared (IR) Transceivers: An IR LED transmits a beam of IR light and if it
finds an obstacle, the light is simply reflected back which is captured by an IR
receiver. Few IR transceivers can also be used for distance measurement.
Ultrasonic Sensor: These sensors generate high frequency sound waves; the
received echo suggests an object interruption. Ultrasonic Sensors can also be
used for distance measurement.
Photoresistor: Photoresistor is a light sensor; but, it can still be used as a
proximity sensor. When an object comes in close proximity to the sensor, the
amount of light changes which in turn changes the resistance of the Photo
resistor. This change can be detected and processed.
29.
Distance Sensor
Mostproximity sensors can also be used as distance sensors, or
commonly known as Range Sensors; IR transceivers and
Ultrasonic Sensors are best suited for distance measurement
Vision Sensor
To pick bins, perform inspection, etc.
Force Sensors
Parts fitting and insertion
Tilt sensors
To balance a robot
Other sensors for robots
Humidity sensors to sense humidity (Moisture)
Magnetic Field Sensors detect the strength of magnetic
field around it
Gas sensors are designed to detect particular gases
(helpful for robots which detects gas leaks)
30.
Actuators
An actuatoris an electromechanical device which converts
energy into mechanical work (or motion). For robots,
actuators are like muscles that perform work.
DC motor
DC motors are very easy to implement and most commonly
used actuators in robots.
DC motor Advantages
They have high speeds
Can produce high torques (with appropriate gears)
Very simple to use
31.
Stepper motor
A steppermotor is an electromechanical device
which converts electrical pulses into discrete
mechanical movements
Excellent response to starting/stopping/reversing
Not easy to operate at extremely high speeds.
32.
SERVO MOTORS
Servo motorsare perfect control motors, Most servo motors can
rotate through about 90 to 180 degrees, some rotate through a full
360 degrees. It has an internal gear-based transmission system and
electronic control
There are many reasons that make servo motors so common – their
ease of control, the low energy requirements (efficiency), the high
torque, servo motors are relatively small sized and have a low
weight.