Downloaded 160 times



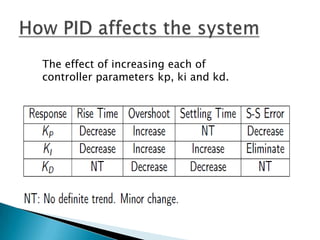
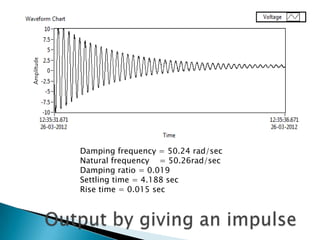
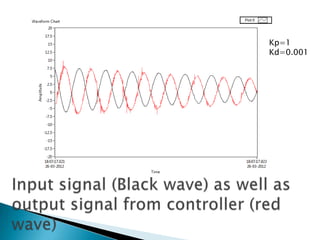
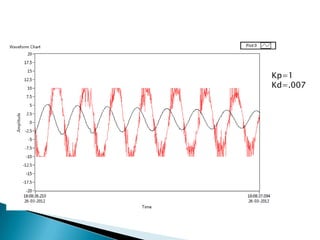
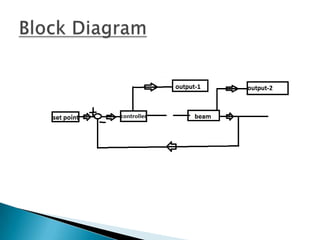

The document outlines a study on active and passive vibration control techniques, detailing the use of PID controllers in managing vibrations in a structure. It discusses material specifications, experimentation, and controller tuning methods, emphasizing the need for amplifiers to actuate the control systems effectively. Experimental results highlight the parameters for designing a PID controller and the challenges encountered in the setup.









































![Power [ Autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/power-autosaved-1316096212-phpapp02-110915091922-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



![Terri Jo Mc Nutt Presentation[1]](https://cdn.slidesharecdn.com/ss_thumbnails/terrijomcnuttpresentation1-1316131746721-phpapp02-110915191002-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















































