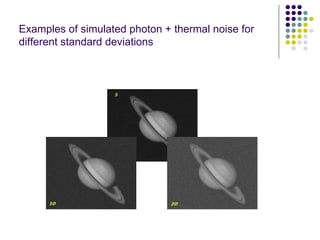
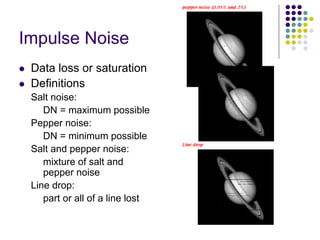
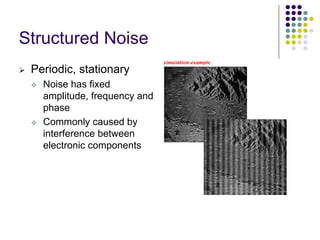
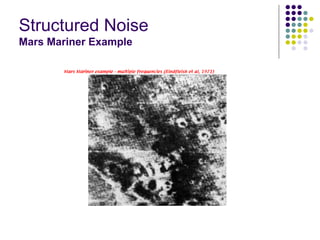
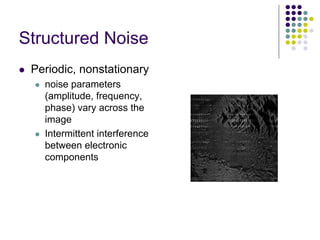
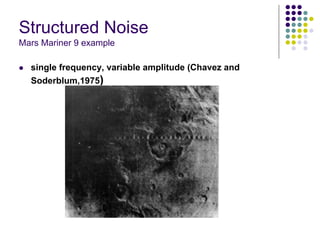
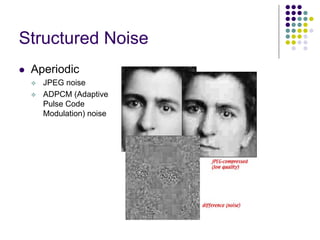
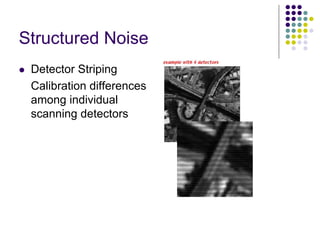
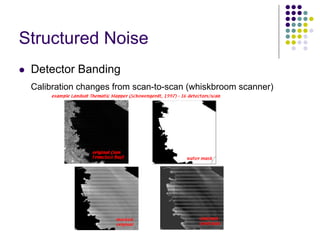
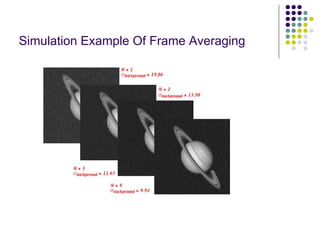
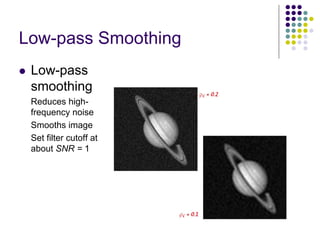
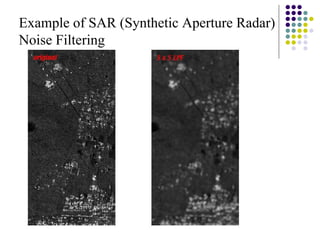
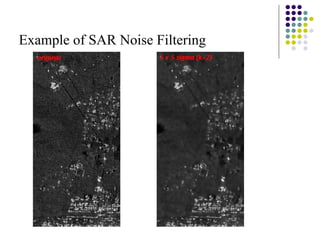
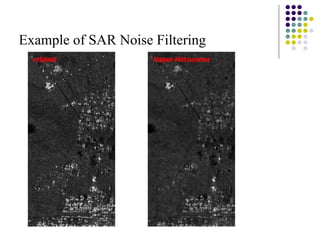
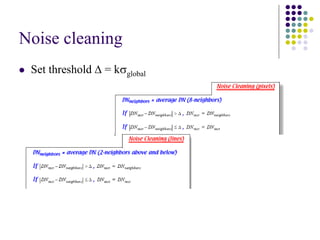
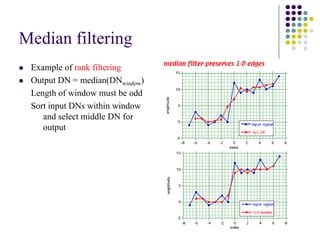
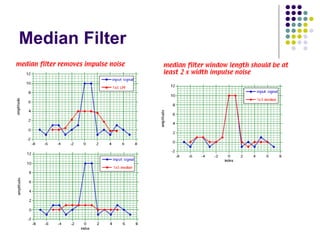
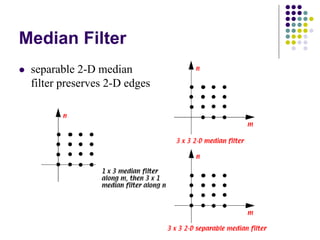
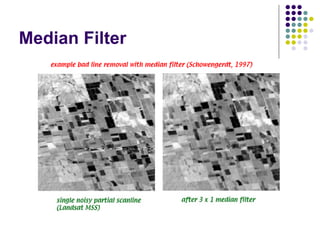
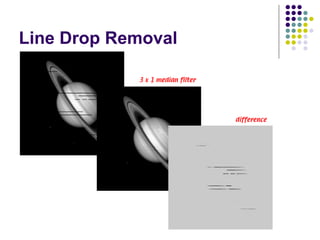
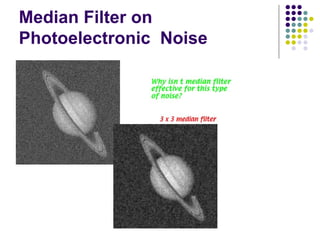
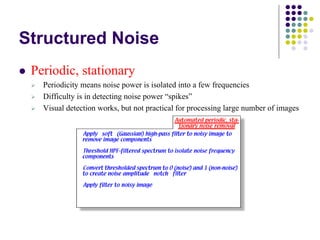
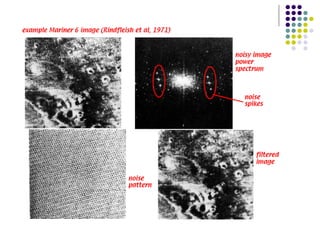
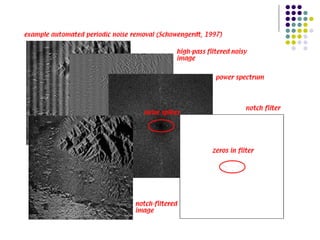
This document discusses various types of noise that can affect digital images, especially those from remote sensing. It describes photon noise, thermal noise, impulse noise, structured noise and other categories. Methods are presented for modeling and reducing noise, including frame averaging, low-pass filtering, median filtering, and filtering specifically for periodic structured noise. Real examples of noise and noise reduction are shown from satellite images.