This document covers image restoration techniques focused on noise removal, categorizing noise sources, models, and corresponding removal methods. It discusses spatial and frequency domain techniques, the use of various filters, and the effectiveness of adaptive median filtering for different types of noise. The lecture outlines key principles and examples to illustrate the application of these noise removal methods.
![12
of
31
• Parameters
• Variance limit - sets the variance range of the noise. The higher the values in the
range, the noisier the image will be. The specified numbers must fall between [0.0,
65025.0];
• Mean - sets the mean of the noise. The higher the mean value, the brighter the
image will be. The specified value must fall between [0.0, 255.0];
• Probability of applying transform - sets the probability of the augmentation being
applied to an image. If you want to apply Gaussian Noise to all images, select a
probability of 1.](https://image.slidesharecdn.com/m03-imagerestoration-240723024335-425494a1/75/M03-Imagerestoration-digital-image-processing-ppt-12-2048.jpg)

![39
of
31
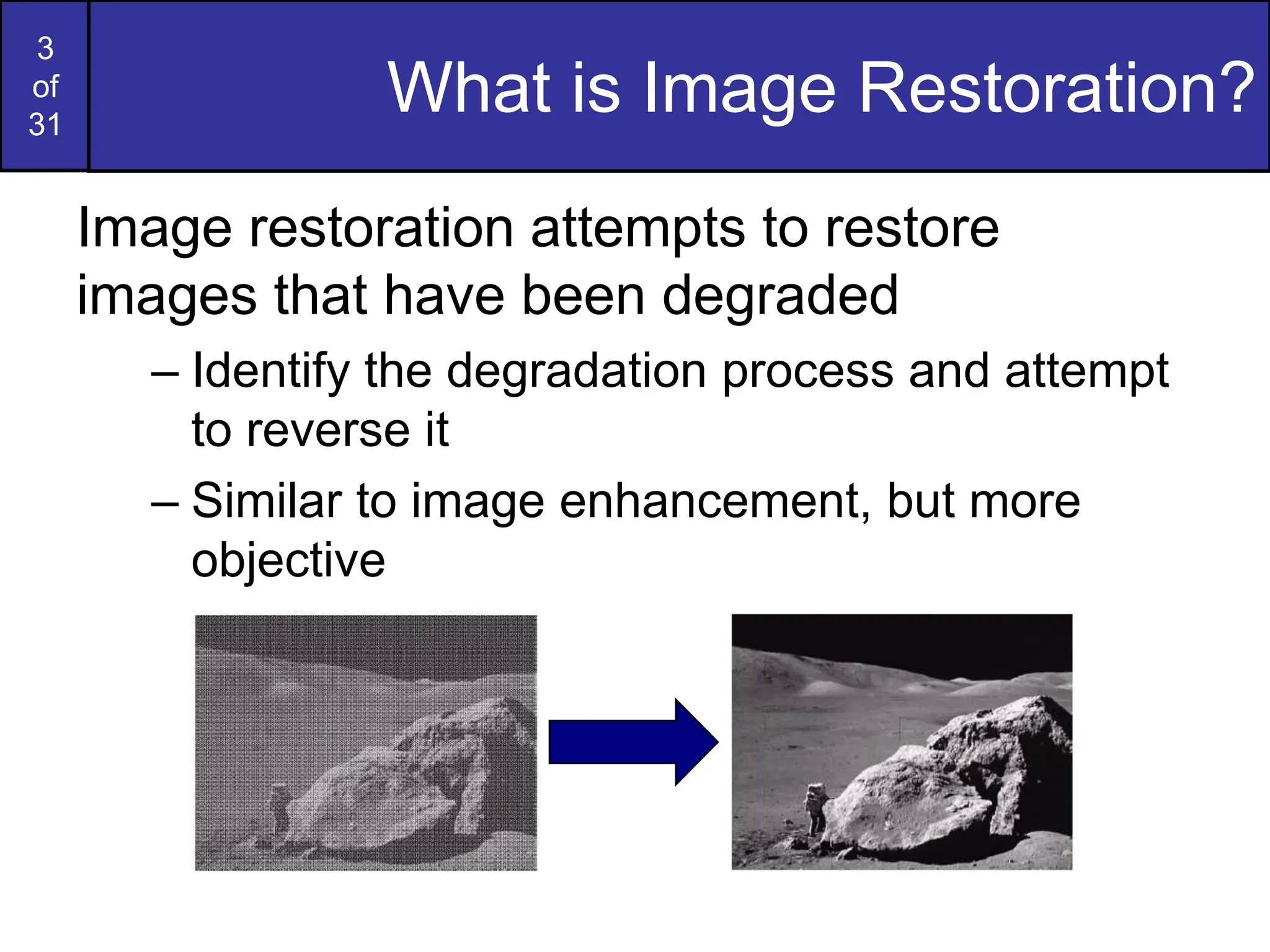
Problem:
4 0 4 9
4 1 8 8
1 1 6 6
1 0 5 6
1 1 5 6
Order: 5*4
M=5
N=4
Mn = 5*4 = 20
Assume d = mn-2
= 20-2 = 18
Alpha = d/2 = 18/2 = 9
0, 0, 1, 1, 1, 1, 1, 1, 4, 4, 4, 5, 5, 6, 6, 6, 6, 8, 8, 9
= 1/(20 - 18) [4+4] = ½(8) = 4 .
xy
S
t
s
r t
s
g
d
mn
y
x
f
)
,
(
)
,
(
1
)
,
(
ˆ](https://image.slidesharecdn.com/m03-imagerestoration-240723024335-425494a1/75/M03-Imagerestoration-digital-image-processing-ppt-39-2048.jpg)