Download as PDF, PPTX



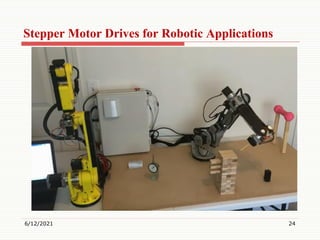
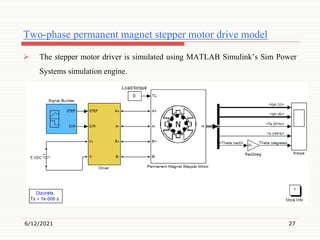
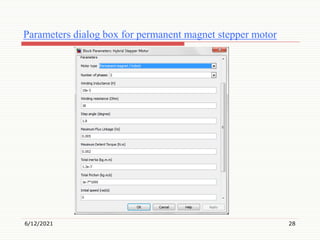
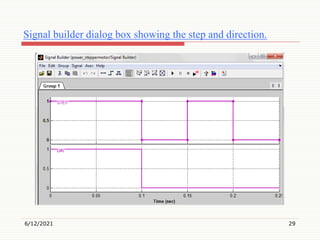


This document discusses stepper motors and their industrial applications, specifically for robotic systems. It provides an overview of stepper motor construction, working principles, driving techniques like single excitation, full step, half step, and microstepping. It also discusses types of stepper motors like permanent magnet, variable reluctance, and hybrid synchronous. The document outlines how to select a stepper motor based on torque-speed requirements. It lists advantages like simple construction and disadvantages like reduced torque at high speeds. Finally, it discusses applications of stepper motors in robotics through a simulation example of a two-phase permanent magnet stepper motor drive model.