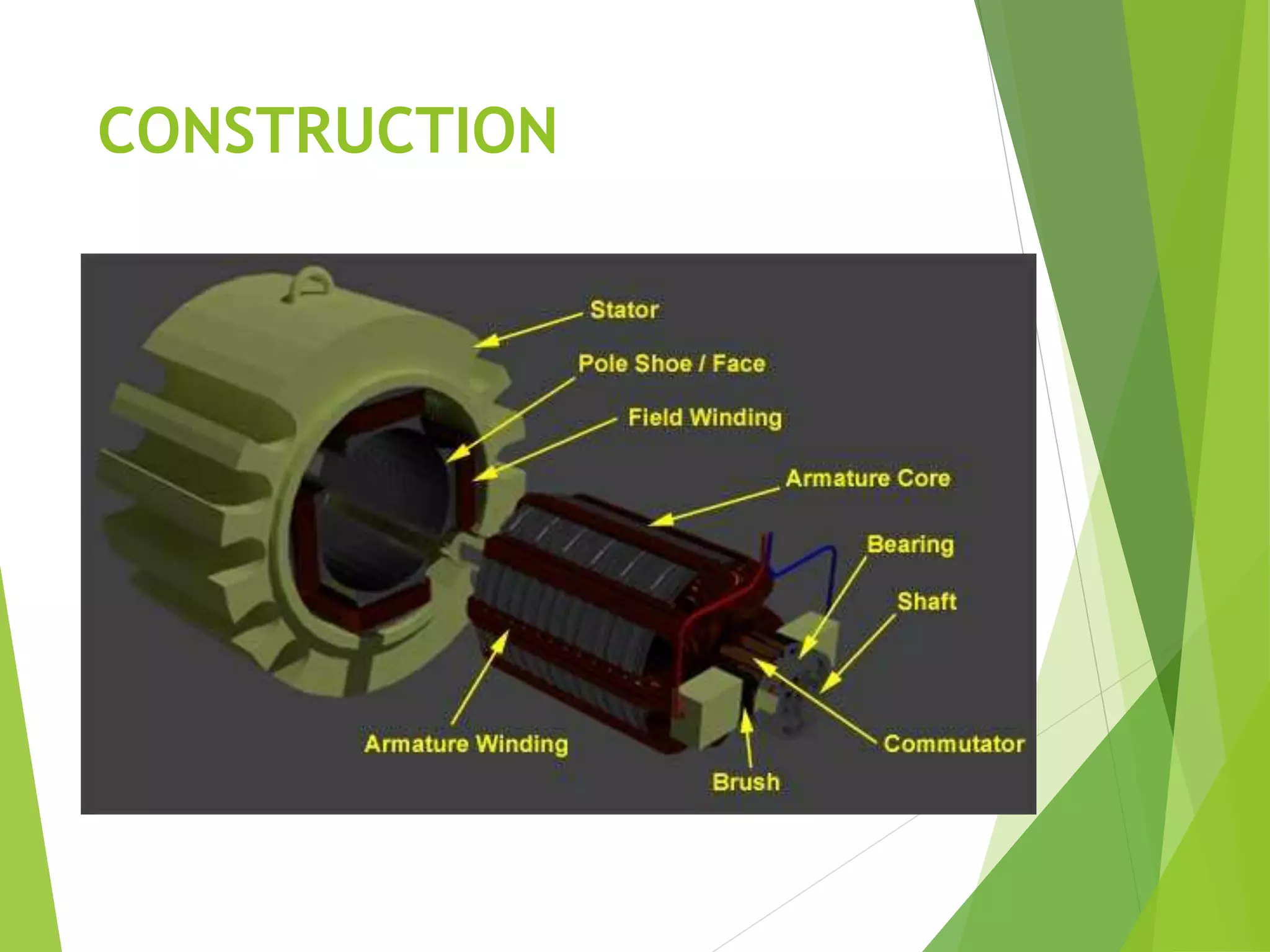
The document provides a comprehensive overview of DC motors, detailing their principles, construction components, and various types such as shunt, series, and compound motors. It also explains the operation of DC motors, including concepts like back EMF, torque equations, and speed control methods, as well as the principles and applications of stepper motors. The summary covers the materials used in motor construction, types of speed control methods, and the advantages and disadvantages of stepper motors.