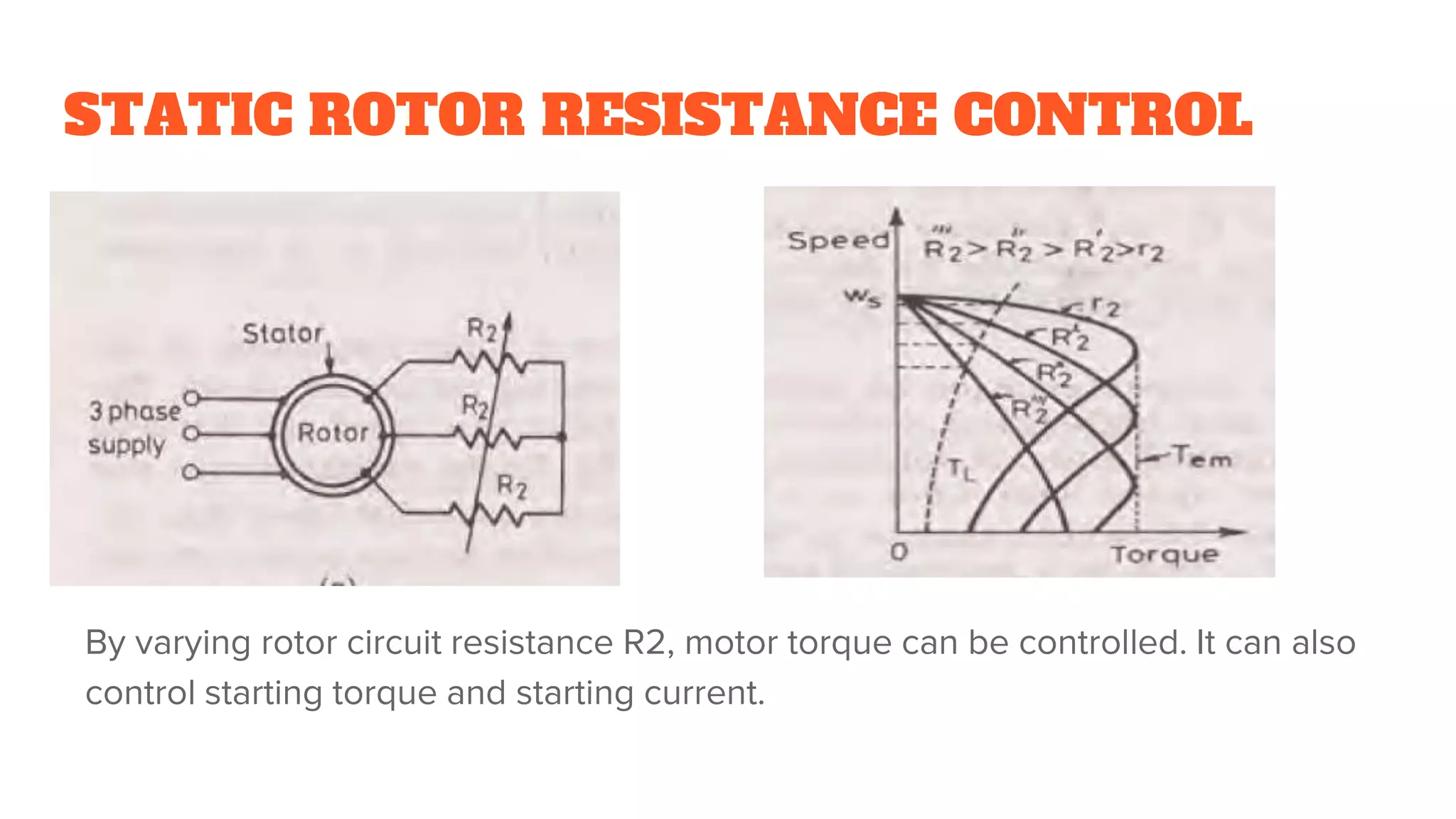
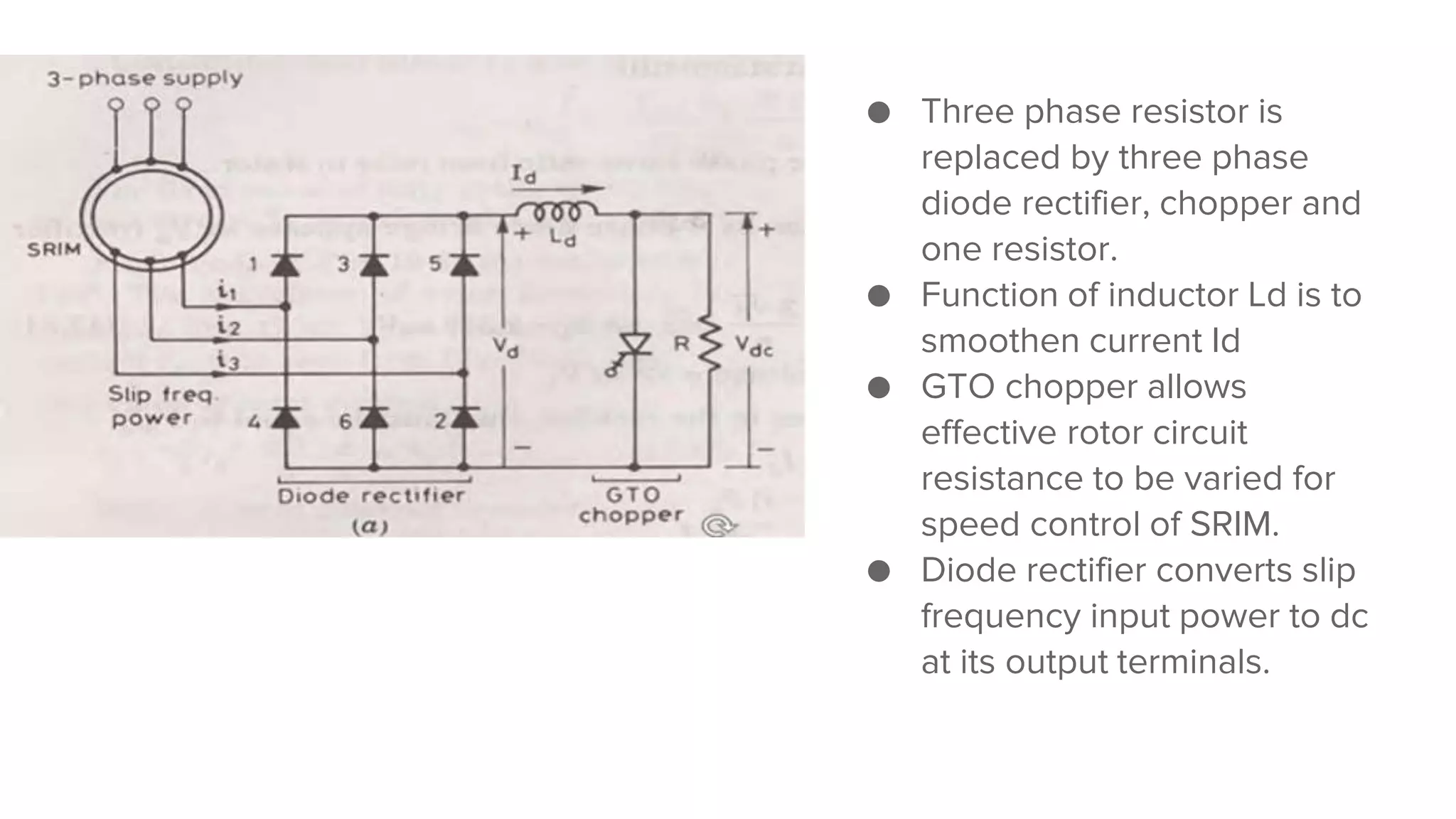
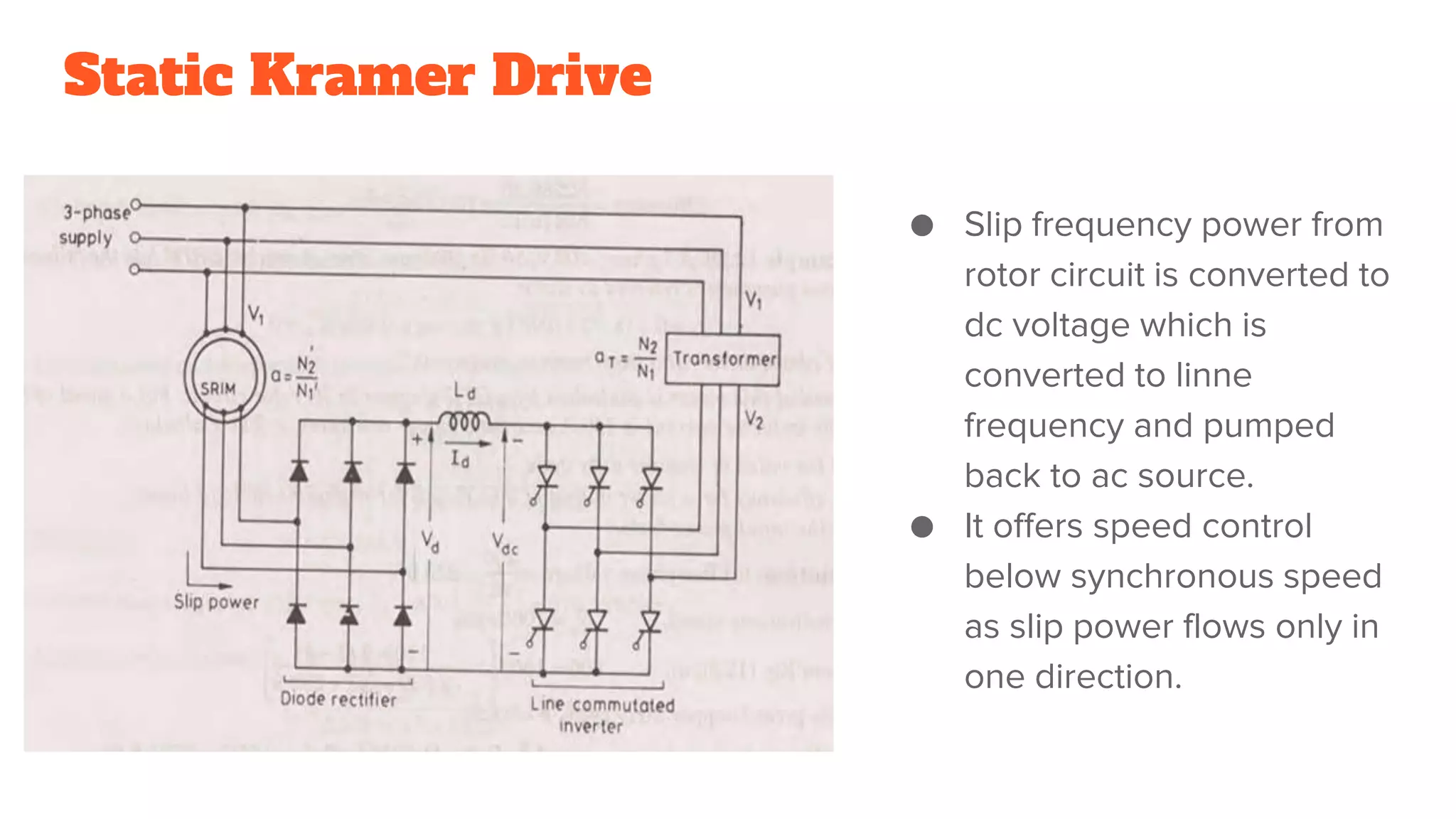
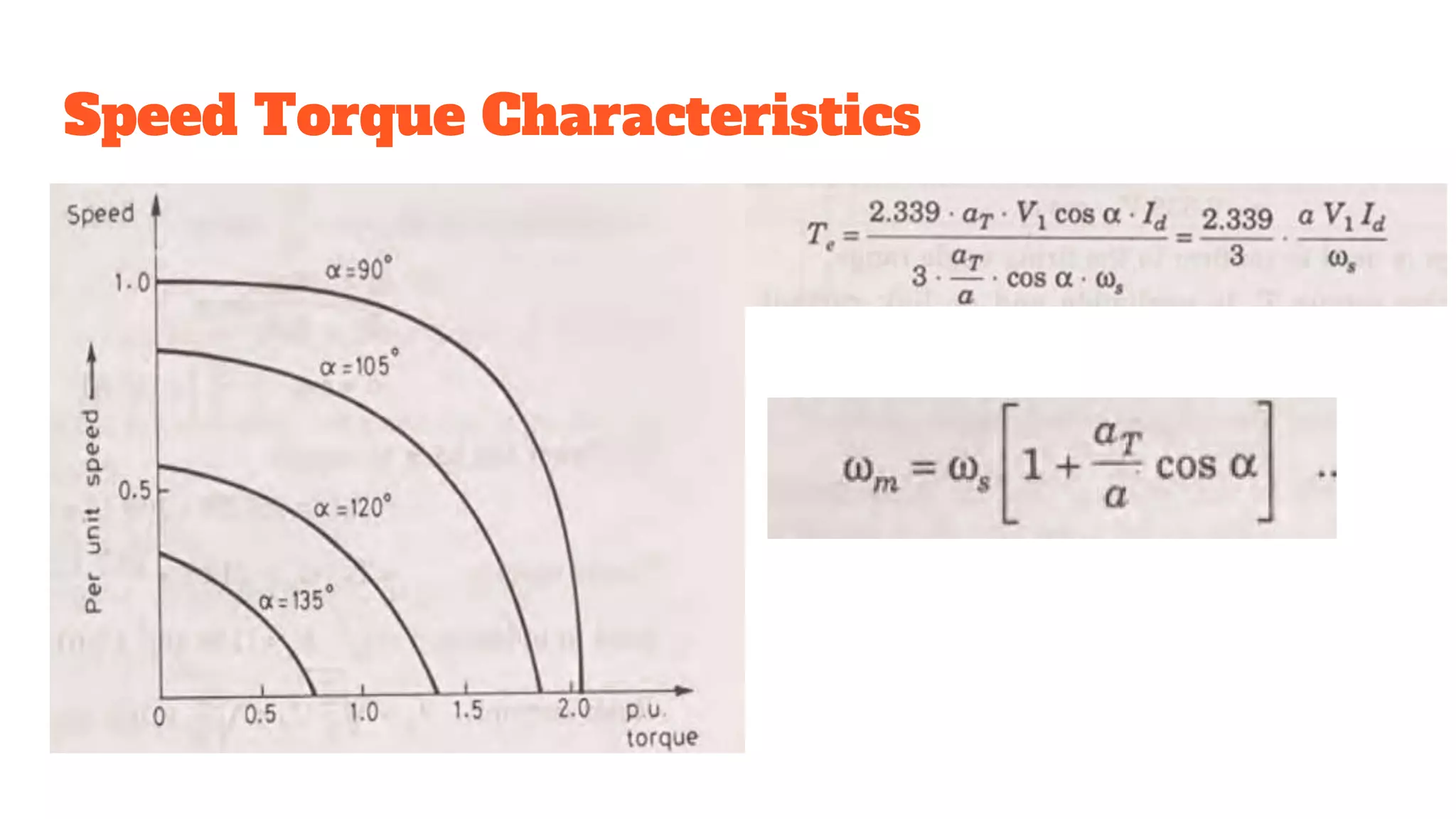
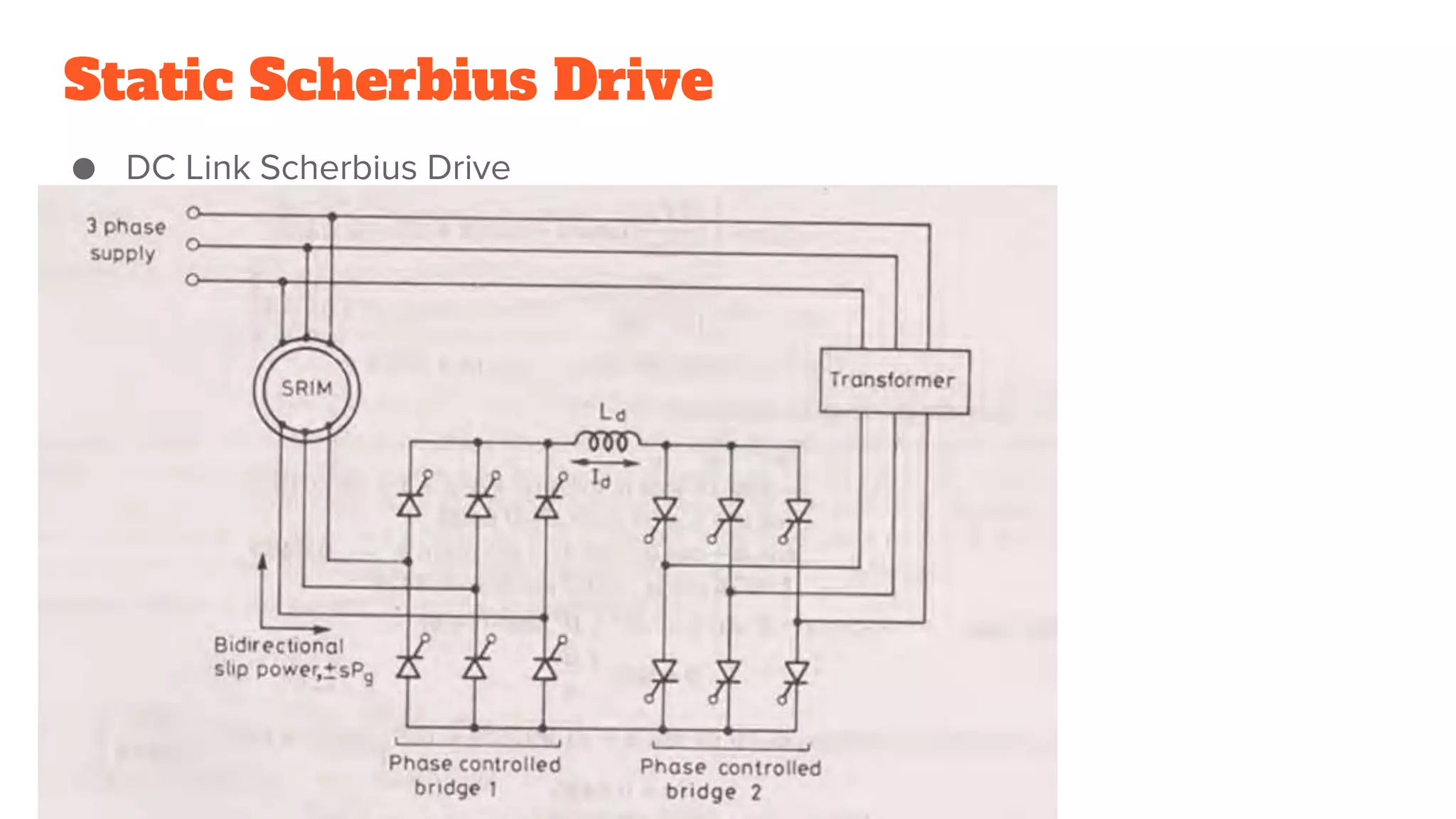
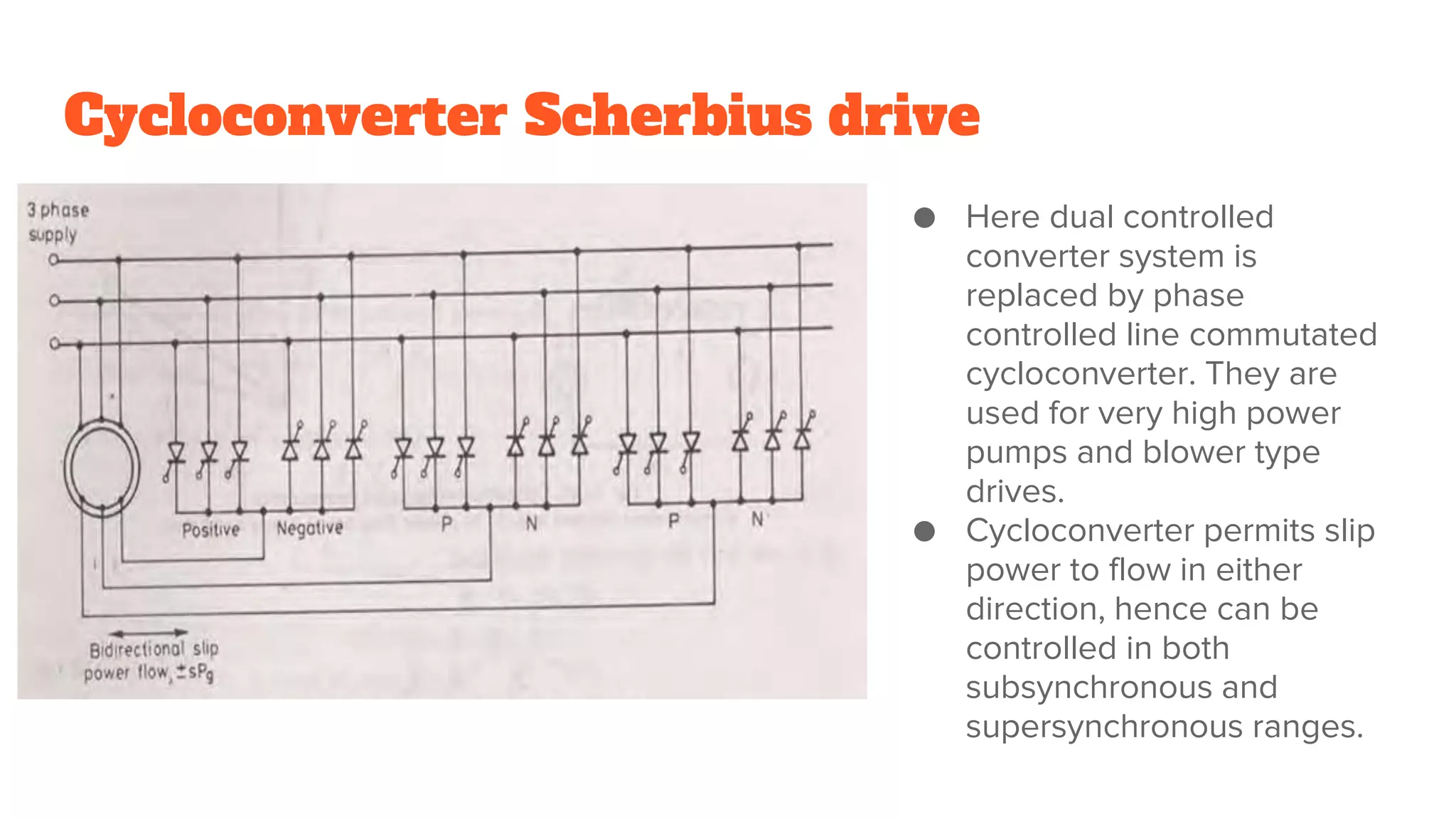
The document discusses methods for speed control of three-phase induction motors, emphasizing various techniques using semiconductor devices such as stator voltage control and slip energy recovery. Two main speed control schemes mentioned are the static Kramer drive and the static Scherbius drive, each with its characteristics and disadvantages. Additionally, a cycloconverter Scherbius drive is highlighted for high-power applications, allowing control in both subsynchronous and supersynchronous ranges.