Download as PDF, PPTX

![3. Parameter Settings
D.C. Motor model and Parameters with Default Value Model Parameters:
If there is no measurement data, the default value will be used:
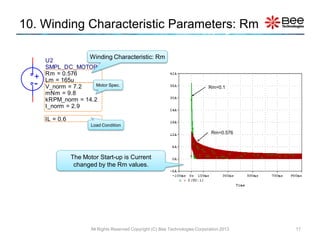
Rm: motor winding resistance []
Lm: motor winding inductance [H]
Data is given by D.C. motor spec-sheet:
V_norm: normal voltage [V]
mNm: normal load [mNm]
kRPM_norm: speed at normal load [kr/min]
I_norm: current at normal load [A]
Load Condition:
IL: load current [A]
All Rights Reserved Copyright (C) Bee Technologies Corporation 2013 5](https://image.slidesharecdn.com/simplifieddcmotorltspiceopen-130108012110-phpapp02/85/Simple-Model-of-DC-Motor-using-LTspice-5-320.jpg)
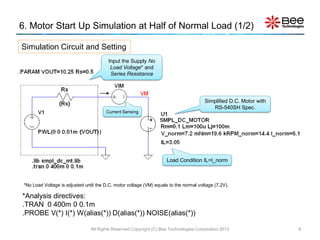
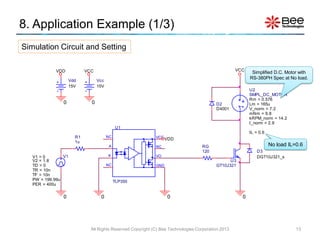

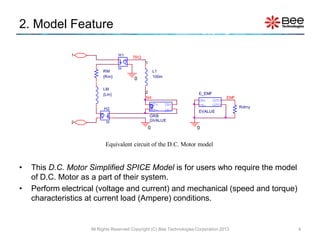
This document describes a simplified SPICE model for simulating a DC motor. It includes 10 sections that describe: 1) the benefits of the model, 2) the model features, 3) how to set the model parameters, 4) an example motor specification, 5) simulating start up at normal load, 6) simulating start up at half load, 7) how the inductance parameter affects the model, 8) an application example, 9) how the inductance parameter affects the model, and 10) how the resistance parameter affects the model. The document provides information to help users set up and run simulations of a DC motor using the simplified SPICE model.