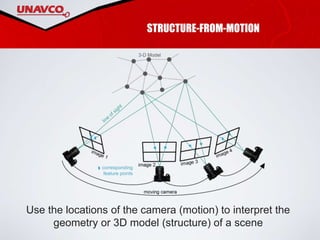
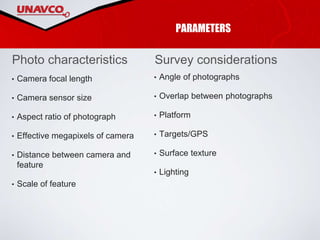
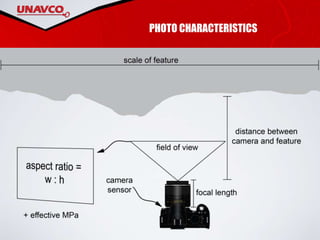
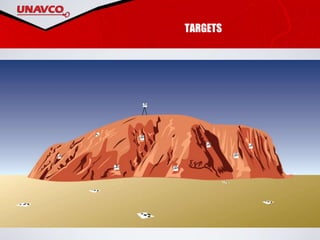
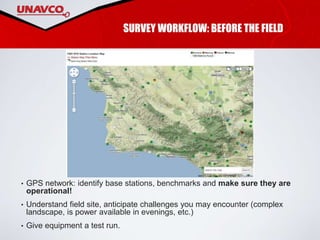
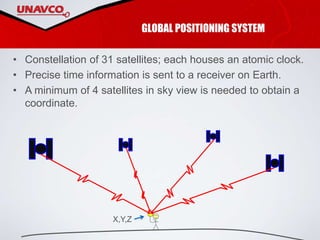
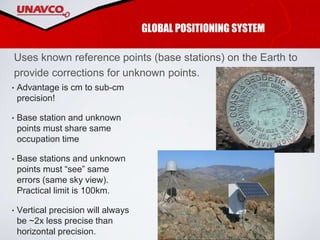
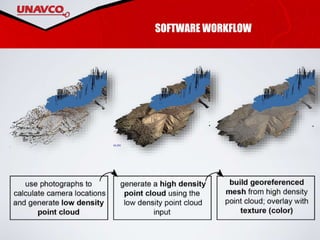
The document discusses structure-from-motion, a photogrammetry technique that uses camera motion and overlapping photos to build 3D models of scenes. It outlines key parameters like camera specs, photo characteristics, and survey considerations. It then details best practices for field surveys using this method, including equipment selection, target placement, and GPS use to georeference models with sub-centimeter precision.