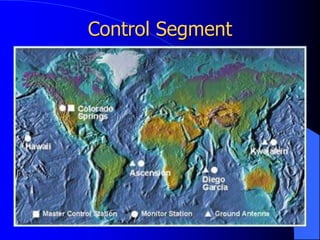
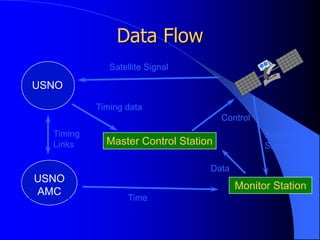
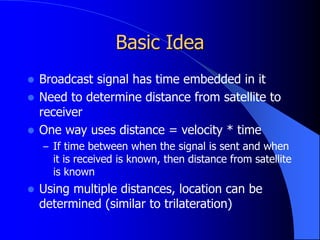
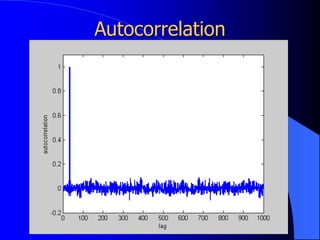
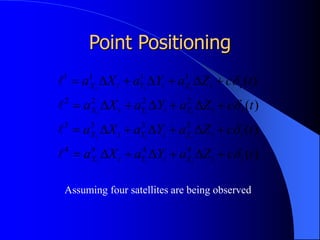
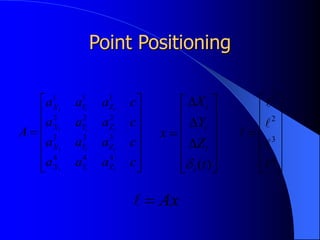
This document provides an overview of GPS (Global Positioning System) including its history, components, signals, measurements, and applications. It discusses how GPS uses precise timing signals from satellites combined with trilateration to determine user locations on Earth. It also covers topics like reference frames, datums, orbit determination, and factors that influence satellite positioning.


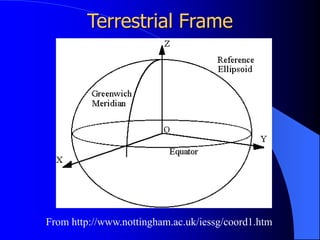
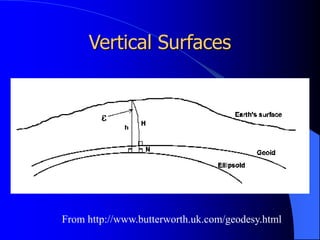
![Terrestrial Frame
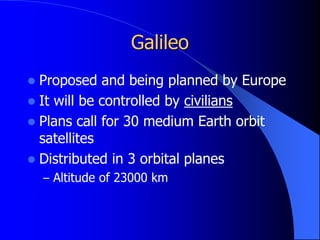
Can transform from non-Cartesian (geodetic)
coordinates to Cartesian coordinates
– X = (N+h) cosφ cosλ
– Y = (N+h) cosφ sinλ
– Z = [ N(1-e2)+h] sin φ
Where N = a/sqrt(1-e2sin2 φ)
h = ellipsoid height
φ = latitude
λ = longitude](https://image.slidesharecdn.com/gpsdetails-220921012152-30967564/85/gps_details-ppt-41-320.jpg)
![Calendar
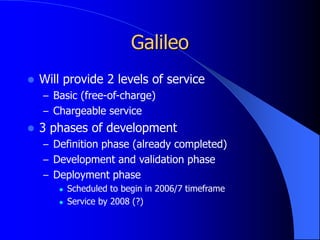
Julian Date (JD) are days from noon (UT)
January 4713 BC
– JD = INT[365.25y] + INT[30.6001(m+1)] + D +
UT/24 + 1720981.5
y = Y-1 and m = M+12 if M ≤ 2
y = Y and m = M if M > 2
Modified Julian Date
– MJD = JD – 2400000.5
– http://tycho.usno.navy.mil/mjd.html
Calculator -
http://aa.usno.navy.mil/data/docs/JulianDate.html](https://image.slidesharecdn.com/gpsdetails-220921012152-30967564/85/gps_details-ppt-51-320.jpg)
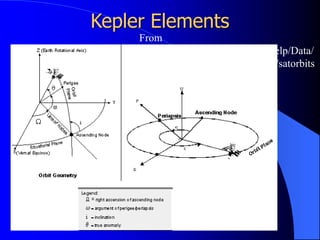

![Code Pseudorange
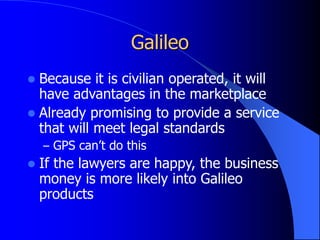
Based on travel time between when
signal is sent and when it is received
Time data also includes errors in both
satellite and receiver clocks
– Δt = tr – ts = [tr(GPS)-δr] – [ts(GPS) – δs]
Pseudorange given by R = c Δt = ρ +
cΔδ
– Pseudo because of cΔδ (where Δδ = δs – δr)
factor](https://image.slidesharecdn.com/gpsdetails-220921012152-30967564/85/gps_details-ppt-83-320.jpg)




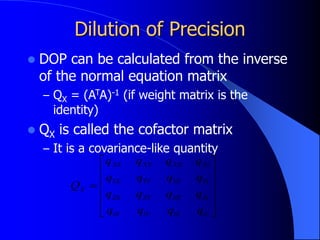
![Dilution of Precision
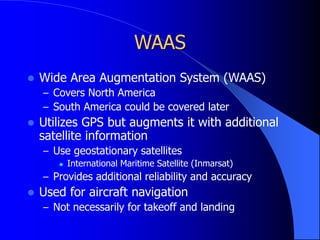
The determinant is proportional to the
scalar triple product
The scalar triple product is one way to
compute the volume of a body defined
by the three vectors
)
(
)]
(
)
[( 1
2
1
3
1
4
i
i
i
i
i
i
](https://image.slidesharecdn.com/gpsdetails-220921012152-30967564/85/gps_details-ppt-197-320.jpg)





















![GPS[Global Positioning System]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystem-130707095218-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






























