Download to read offline



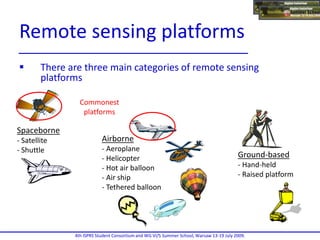
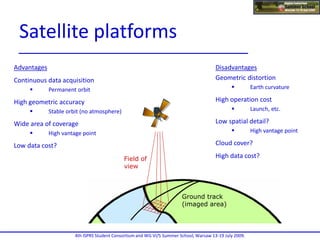

The document explains radar technology, distinguishing between imaging and non-imaging radar, and describes how radar measures various physical quantities such as range, speed, and temperature. It also defines sensors as devices that convert physical quantities into readable signals and discusses their applications in everyday technology and remote sensing. Additionally, it outlines the types of remote sensing platforms, including spaceborne, airborne, and ground-based systems, along with the advantages and disadvantages of each.