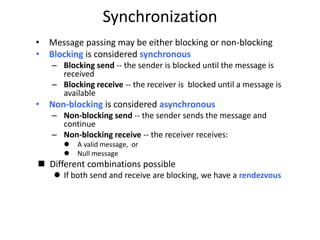
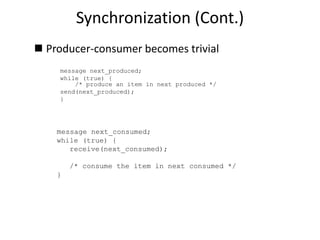
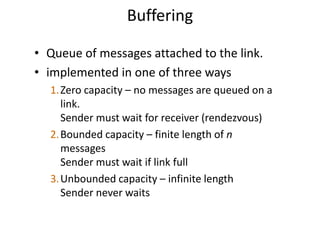
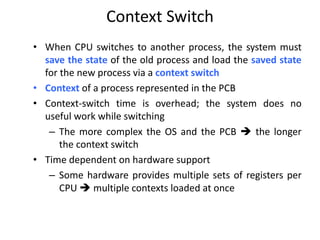
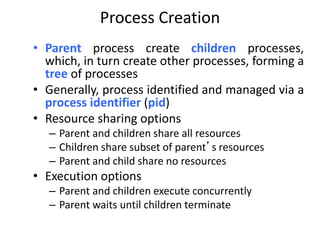
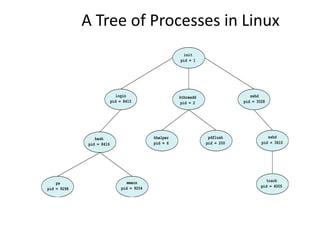
Chapter 3 discusses processes in operating systems, covering concepts such as process states, process control blocks, scheduling, and interprocess communication. It details the roles of different types of schedulers, the operations for process creation and termination, and provides insights on multi-process architecture and IPC mechanisms like shared memory and message passing. The chapter also introduces the producer-consumer problem and discusses the types of communication links used in interprocess communication.
![Bounded-Buffer – Shared-Memory Solution
• Shared data
#define BUFFER_SIZE 10
typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;
• Solution is correct, but can only use BUFFER_SIZE-1 elements](https://image.slidesharecdn.com/ch3-new-200322133342/85/Processes-32-320.jpg)
![Bounded-Buffer – Producer
item next_produced;
while (true) {
/* produce an item in next produced */
while (((in + 1) % BUFFER_SIZE) == out)
; /* do nothing */
buffer[in] = next_produced;
in = (in + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/ch3-new-200322133342/85/Processes-33-320.jpg)
![Bounded Buffer – Consumer
item next_consumed;
while (true) {
while (in == out)
; /* do nothing */
next_consumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
/* consume the item in next consumed */
}](https://image.slidesharecdn.com/ch3-new-200322133342/85/Processes-34-320.jpg)