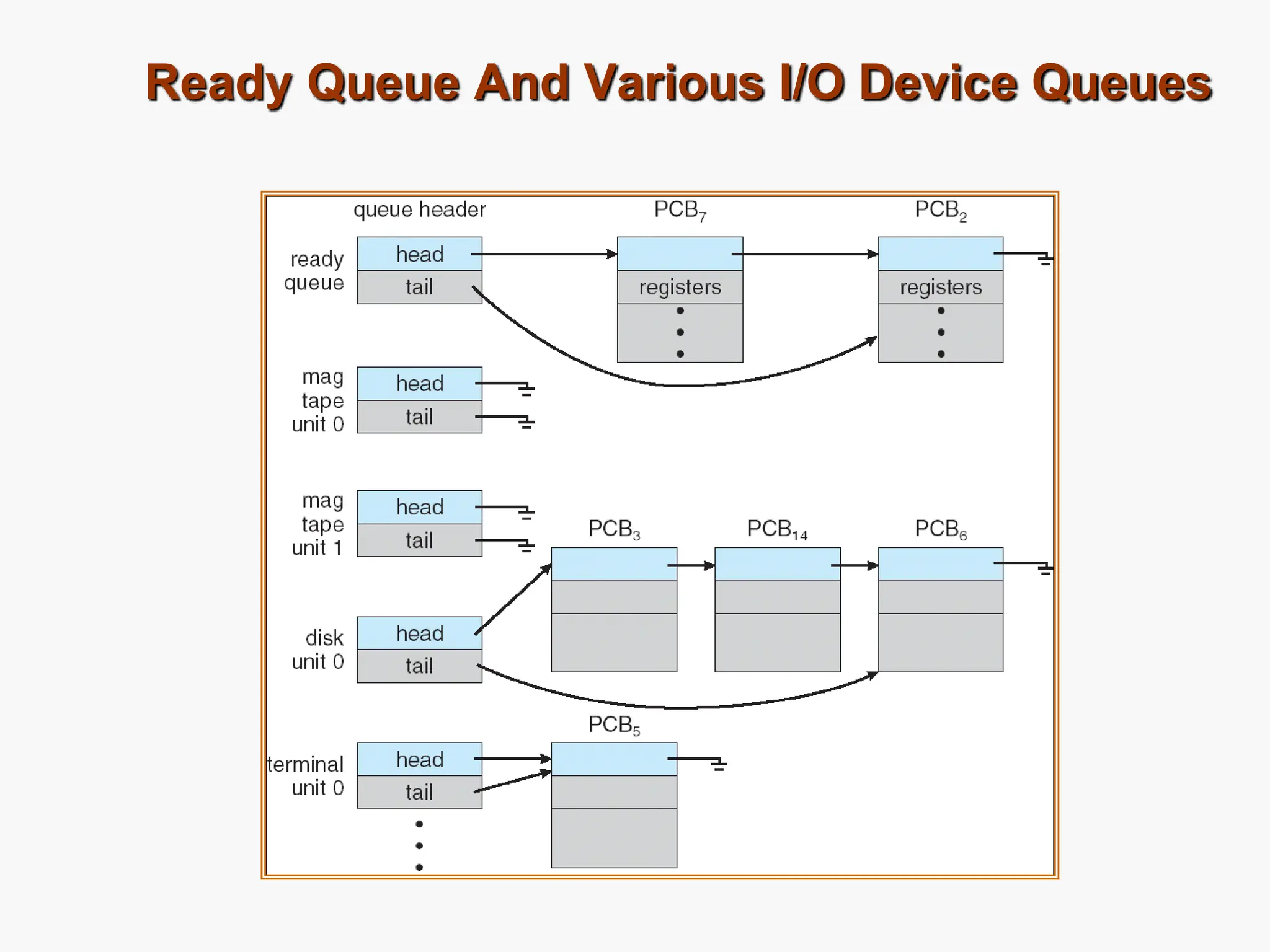
Chapter 3 discusses the concept of processes in operating systems, defining a process as a program in execution and outlining its various states, such as new, running, waiting, ready, and terminated. It describes the role of Process Control Blocks (PCBs) in managing process information and addresses the importance of process scheduling for optimizing CPU utilization. Additionally, the chapter covers process creation, termination, and inter-process communication mechanisms, including shared memory and message passing.