More Related Content

PDF

PDF

PDF
パターン認識と機械学習 §6.2 カーネル関数の構成 
ZIP

PDF

PDF

PDF

PDF
文字列カーネルによる辞書なしツイート分類 〜文字列カーネル入門〜 What's hot

PPTX
クラシックな機械学習の入門 5. サポートベクターマシン 
PDF

PDF
TokyoNLP#7 きれいなジャイアンのカカカカ☆カーネル法入門-C++ 
PDF

PDF
行列およびテンソルデータに対する機械学習(数理助教の会 2011/11/28) 
PDF
クラシックな機械学習の入門 3. 線形回帰および識別 
PDF

PDF
![[PRML勉強会資料] パターン認識と機械学習 第3章 線形回帰モデル (章頭-3.1.5)(p.135-145)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlp-150228215621-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[PRML勉強会資料] パターン認識と機械学習 第3章 線形回帰モデル (章頭-3.1.5)(p.135-145) 
PDF

PDF

PDF
Sparse estimation tutorial 2014 
PPTX

PDF
クラシックな機械学習の入門 6. 最適化と学習アルゴリズム 
PDF

PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会) 
PDF
正則化つき線形モデル(「入門機械学習第6章」より) 
PDF

PDF

PDF
Viewers also liked

PDF
Perkembangan asuransi syariah di indonesia 2012 
PDF

PPTX
How to Make a Halloween Mobile 
PDF
Grayling foreign-investment-think-piece june-2011 
PDF
Cаммари исследования Grayling восприятия последствий вступления в ВТО бизнесо... 
PDF

DOCX

PPT

PPTX
![презентация1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/11-091214205511-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX

PPTX

PPT

PDF
01 Anne Hojer Simonsen Agencia Danesa De La Energia ![презентация1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/11-091214210444-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX

PPT

PPTX

PPTX

PPTX

PPTX

PDF
Créez votre cours en ligne flyer automne Similar to Prml sec6

PDF

PDF
PRML_titech 2.3.1 - 2.3.7 
PDF

PDF
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4 
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会 ![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models 
PDF
PRML2.3.8~2.5 Slides in charge 
PDF
PRML 3.3.3-3.4 ベイズ線形回帰とモデル選択 / Baysian Linear Regression and Model Comparison) 
PDF
![[PRML] パターン認識と機械学習(第2章:確率分布)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter2-171002030018-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[PRML] パターン認識と機械学習(第2章:確率分布) ![[PRML] パターン認識と機械学習(第3章:線形回帰モデル)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter3-171003081954-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[PRML] パターン認識と機械学習(第3章:線形回帰モデル) 
PDF

PPTX

PDF
ガウス過程回帰の導出 ( GPR : Gaussian Process Regression ) 
PDF

PDF
機械学習による統計的実験計画(ベイズ最適化を中心に) 
PDF

PDF
Bishop prml 9.3_wk77_100408-1504 
PDF

PDF
20190721 gaussian process More from Keisuke OTAKI

PDF

PDF
Reading Seminar (140515) Spectral Learning of L-PCFGs 
PDF

PDF
Grammatical inference メモ 1 
PDF

PDF
Tensor Decomposition and its Applications 
PDF

PDF

PDF

PDF

PDF

PDF

PDF
Sec16 greedy algorithm no2 
PDF
Sec16 greedy algorithm no1 
PDF
Sec15 dynamic programming 
PPTX
Prml sec6
- 1.
PRML §6 —kernel method
@taki0313
10/10/22
@taki0313
- 2.
- 3.
2/50
Introduction
@§3 回帰 /@§4 分類 — linear, parametric
kernel function k(x, x′
) = φ(x)T
φ(x′
)
– ある特徴空間上での内積, 対称k(x, x′
) = k(x′
, x)
– 恒等カーネル k(x, x′
) = xT
x′
– 不変カーネル k(x, x′
) = k(x − x′
)
– 均一カーネル k(x, x′
) = k(||x − x′
||)
kernel trick
– kernelを用いて特徴空間上でごにょごにょする技法
@taki0313
- 4.
3/50
−1 0 1
−1
−0.5
0
0.5
1
−10 1
0
0.25
0.5
0.75
1
−1 0 1
0
0.25
0.5
0.75
1
−1 0 1
−0.4
0.0
1.0
−1 0 1
0.0
1.0
2.0
−1 0 1
0.0
3.0
6.0
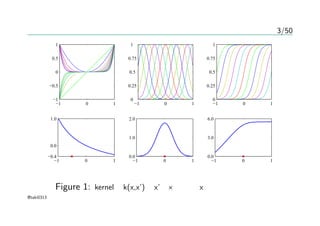
Figure 1: kernelとk(x,x’)をx’を×としてxの関数にしたもの
@taki0313
- 5.
- 6.
5/50
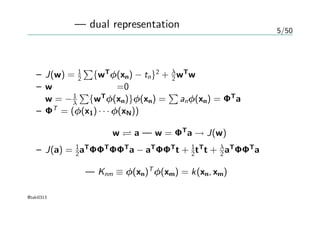
双対表現 — dualrepresentation
正則化項付き線形回帰の評価式
– J(w) = 1
2
∑
{wT
φ(xn) − tn}2
+ λ
2 wT
w
– wについての勾配=0
w = −1
λ
∑
{wT
φ(xn)}φ(xn) =
∑
anφ(xn) = ΦT
a
– ΦT
= (φ(x1) · · · φ(xN))
パラメータの変換 w a — w = ΦT
a → J(w)
– J(a) = 1
2aT
ΦΦT
ΦΦT
a − aT
ΦΦT
t + 1
2tT
t + λ
2 aT
ΦΦT
a
グラム行列 — Knm ≡ φ(xn)T
φ(xm) = k(xn, xm)
@taki0313
- 7.
6/50
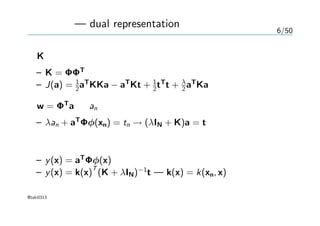
双対表現 — dualrepresentation
Kを用いて
– K = ΦΦT
– J(a) = 1
2aT
KKa − aT
Kt + 1
2tT
t + λ
2 aT
Ka
w = ΦT
a を an の式に代入して
– λan + aT
Φφ(xn) = tn → (λIN + K)a = t
予測の式
– y(x) = aT
Φφ(x)
– y(x) = k(x)
T
(K + λIN)−1
t — k(x) = k(xn, x)
@taki0313
- 8.
7/50
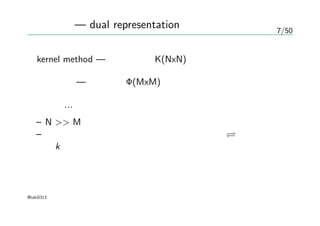
双対表現 — dualrepresentation
kernel method — グラム行列K(NxN)の逆行列を求める
基底関数 — 計画行列Φ(MxM)の逆行列を求める
一般に…
– N >> M
– グラム行列の逆行列を求めるコストは大きい 全てをカーネ
ルk の上で行なえるのが嬉しいことらしい。
@taki0313
- 9.
- 10.
9/50
カーネル関数の構成
カーネル関数 — 特徴空間上への写像φ(x)
カーネルkが有効か? ある空間上での内積になること
– (xT
z)2
= (x1z1 + x2z2)2
= x2
1 z2
1 + 2x1z1x2z2 + x2
2 z2
2
– = (x2
1 ,
√
2x1x2, x2
2 )(z2
1 ,
√
2z1z2, z2
2 )T
= φ (x)
T
φ (z)
カーネルkが有効か? グラム行列K が半正定値行列
カーネルの構成法 — (6.13) ∼ (6.22)
@taki0313
- 11.
10/50
カーネルの作り方
k(x, x′
) =ck1(x, x′
)
k(x, x′
) = f (x)k1(x, x′
)f (x′
)
k(x, x′
) = q(k1(x, x′
))
k(x, x′
) = exp(k1(x, x′
))
k(x, x′
) = k1(x, x′
) + k2(x, x′
)
k(x, x′
) = k1(x, x′
)k2(x, x′
)
k(x, x′
) = k3(φ(x), φ(x′
))
k(x, x′
) = xT
Ax
k(x, x′
) = ka(xa, x′
a) + kb(xb, x′
b)
k(x, x′
) = ka(xa, x′
a)kb(xb, x′
b)
– cは定数、fは任意の
関数
– qは非負の係数をも
つ多項式
– Φ : x → RM
– k3はRM
上のkernel
– Aは対称, 半正定値
– x = (xa, xb)
– ka, kb はそれぞれで
有効なkernel
@taki0313
- 12.
11/50
有名なカーネル
ガウスカーネル k(x, x′
)= exp(−1
2||x − x′
||2
)
– ||x − x′
||2
= xT
x + (x′
)T
x′
− 2xT
x′
– カーネルトリック — → κ(x, x) + κ(x′
, x′
) − 2κ(x, x′
)
シグモイドカーネル k(x, x′
) = tanh(axT
x′
+ b)
@taki0313
- 13.
12/50
確率的生成モデル → カーネル
生成モデルp(x) → k(x, x′
) = p(x)p(x′
)
一般化
– 離散 — k(x, x′
) =
∑
i p(x|i)p(x′
|i)p(i)
– 連続 — k(x, x′
) =
∫
p(x|z)p(x′
|z)p(z)dz
HMM → §13
– よく知らないので…
– k(X, X′
) =
∑
Z p(X|Z)p(X′
|Z)p(Z)
@taki0313
- 14.
13/50
生成モデル → カーネル
parametricな生成モデル — p(x|θ)
フィッシャーカーネル
– フィッシャースコア — g(θ, x) = ∇θ ln p(x|θ)
– フィッシャー情報量行列 — F = Eθ[g(θ, x)g(θ, x)T
]
近似 — F ∼ 1
N
∑
g(θ, xn)g(θ, xn)T
– フィッシャーカーネル
∗ k(x, x′
) = g(θ, x)T
F−1
g(θ, x′
)
∗ k(x, x′
) = g(θ, x)T
g(θ, x′
)
@taki0313
- 15.
- 16.
15/50
RBF network —Radial Basis Function
関数補間
– 入力集合 {x1, x2, · · · , xN, }{t1, t2, · · · , tN}
– 1 ≤ n ≤ N について f (xn) = tn になる関数fを求める
– f (x) =
∑
wnh(||x − xn||) として{wn} を最小二乗法で求める。
— 過学習
ノイズが入る場合の補間
– ノイズの分布 ν(ξ) — 確率変数ξ
– 二乗誤差 E = 1
2
∑N
n=1
∫
{y(xn + ξ) − tn}2
ν(ξ)dξ
@taki0313
- 17.
16/50
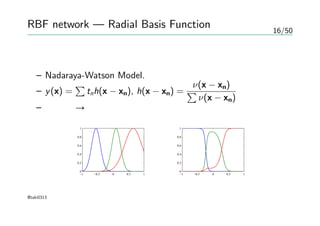
RBF network —Radial Basis Function
変分法による最適化
– Nadaraya-Watson Model.
– y(x) =
∑
tnh(x − xn), h(x − xn) =
ν(x − xn)
∑
ν(x − xn)
– 正則化 → 全ての関数が小さい値にならにように
−1 −0.5 0 0.5 1
0
0.2
0.4
0.6
0.8
1
−1 −0.5 0 0.5 1
0
0.2
0.4
0.6
0.8
1
@taki0313
- 18.
17/50
6.3.1 Nadaraya-Watson Model
§3.3.3— 新しい入力xに対する予測を線形結合の式で行う
– y(x, mN) =
∑
k(x, xn)tn — 等価カーネル
– 和の制約を満たしている
回帰 密度推定
– 訓練集合 {xn, tn} → p(x, t)の推定 — Parzen推定法(§2.5.1)
– p(x, t) = 1
N
∑
f (x − xn, t − tn) — 各要素を中心に持つ
– 条件付き期待値 が良い — y(x) = E[t|x] =
∫ ∞
−∞
tp(t|x)dt
– E[t|x] =
∫
tpdt
∫
pdt
=
∑
n
∫
tf (x − xn, t − tn)dt
∑
m
∫
f (x − xm, t − tm)dt
@taki0313
- 19.
18/50
6.3.1 Nadaraya-Watson Model
y(x)= E[t|x] =
∫
tpdt
∫
pdt
=
∑
n
∫
tf (x − xn, t − tn)dt
∑
m
∫
f (x − xm, t − tm)dt
簡単化 — 各要素の平均は0 —
∫
tf (x, t)dt = 0
変数置換 → Nadaraya-Watson Model
– y(x) =
∑
n g(x − xn)tn/
∑
m g(x − xm) =
∑
n k(x, xn)tn
– g(x) =
∫ ∞
−∞
f (x, t)dt
– k(x, xn) = g(x − xn)/
∑
m g(x − xm)
@taki0313
- 20.
- 21.
- 22.
- 23.
22/50
6.4.1 線形回帰の復習
線形回帰モデルy(x) =wT
φ(x)
パラメータの事前分布 p(w) = N(w|0, α−1
I)
入力 {x1, x2, · · · , xN}による評価
{y(x1), y(x2), · · · , y(xN)}による評価
→ {yn}, y = (y1, y2, · · · , yN)T
を評価する
– E[y] = ΦE[w] = 0
– Cov[y] = ΦCov[wwT
]ΦT
= 1
αΦΦT
= K
– Knm = k(xn, xm) = 1
α φ(xn)T
φ(xm)
線形回帰はガウス過程の特殊な場合
@taki0313
- 24.
- 25.
- 26.
25/50
6.4.2 ガウス過程による回帰
ガウス分布のノイズを考える —tn = yn + εn
p(tn|yn) = N(tn|yn, β−1
)
データ y = (y1, · · · , yN)T
と t = (t1, · · · , tN)が与えられる
その同時分布が等方的ガウス分布になるとする(ガウス過程)
– p(t|y) = N(t|y, β−1
IN)
– p(y) = N(y|0, K)
– K は xn, xm が似ていれば大きい値になる
実際の予測のための分布 p(t)
@taki0313
- 27.
26/50
6.4.2 ガウス過程による回帰
実際の予測のための分布 p(t)を考える
–p(t) =
∫
p(t|y)p(y)dy ∼ N(t|0, C)
– C(xn, xm) = k(xn, xm) + β−1
δnm
– データとノイズが独立なので共分散を加えるだけでいい
回帰に使われるようなモデル
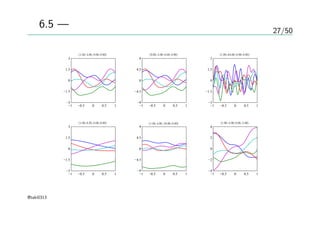
k(xn, xm) = θ0 exp{−θ1
2 ||xn − xm||2
} + θ2 + θ3xT
n xm
— (θ0, θ1, θ2, θ3)毎のプロット : 図6.5
@taki0313
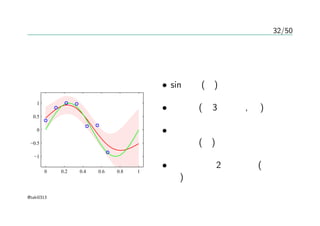
- 28.
27/50
図6.5 — 事前分布からのサンプル
(1.00,4.00, 0.00, 0.00)
−1 −0.5 0 0.5 1
−3
−1.5
0
1.5
3
(9.00, 4.00, 0.00, 0.00)
−1 −0.5 0 0.5 1
−9
−4.5
0
4.5
9
(1.00, 64.00, 0.00, 0.00)
−1 −0.5 0 0.5 1
−3
−1.5
0
1.5
3
(1.00, 0.25, 0.00, 0.00)
−1 −0.5 0 0.5 1
−3
−1.5
0
1.5
3
(1.00, 4.00, 10.00, 0.00)
−1 −0.5 0 0.5 1
−9
−4.5
0
4.5
9
(1.00, 4.00, 0.00, 5.00)
−1 −0.5 0 0.5 1
−4
−2
0
2
4
@taki0313
- 29.
- 30.
29/50
6.4.2 ガウス過程による回帰
これまで —ガウス過程の視点からの同時分布のモデル化
新しい入力に対する予測が必要
– 訓練集合 {x1, · · · , xN}, t = (t1, · · · , tN)T
– 入力 xN+1 , その予測値 tN+1
– 予測分布 p(tN+1|tN)
– 同時分布 p(tN) を書き下す
– tN+1 = (t1, · · · , tN, tN+1)T
@taki0313
- 31.
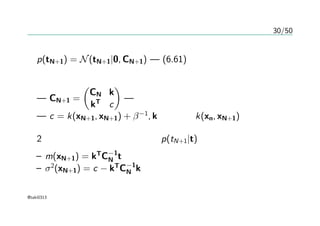
30/50
予測分布
p(tN+1) = N(tN+1|0,CN+1) — (6.61)より
共分散行列の分割
— CN+1 =
(
CN k
kT
c
)
— 正定値でなければならない
— c = k(xN+1, xN+1) + β−1
, kの要素はk(xn, xN+1)
2章の結果から、条件付き分布p(tN+1|t)は
– m(xN+1) = kT
C−1
N t
– σ2
(xN+1) = c − kT
C−1
N k
@taki0313
- 32.
- 33.
- 34.
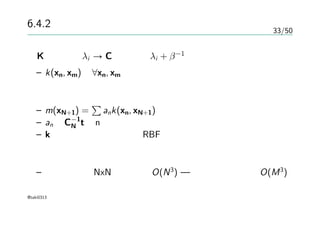
33/50
6.4.2 ガウス過程による回帰
Kの固有値λi →Cの固有値λi + β−1
– k(xn, xm)が∀xn, xm に関して半正定値であればいい
予測分布の平均
– m(xN+1) =
∑
ank(xn, xN+1)
– an はC−1
N tのn番目の要素
– kが動径に依存するならRBFが使える
計算量
– ガウス過程 NxNの逆行列 O(N3
) — 基底による回帰 O(M3
)
@taki0313
- 35.
34/50
6.4.3 超パラメータの学習
予測が共分散の選び方にある程度依存する →parametric
ハイパーパラメータθ → p(t|θ)
– θの点推定, 共役勾配法
ガウス分布&ガウス過程では…
– ln p(t|θ) = −1
2 ln |CN| − 1
2tT
C−1
N t − N
2 ln(2π)
– 勾配 — ∂
∂θi
ln p(t|θ) = −1
2Tr(C−1
N
∂CN
∂θi
) + 1
2tT
C−1
N
∂CN
∂θi
C−1
N t
一般には非凸関数で、近似的に解く。以下略
@taki0313
- 36.
- 37.
- 38.
37/50
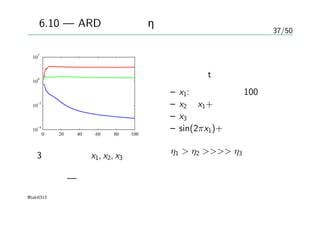
図6.10 — ARDにおけるηの変化
020 40 60 80 100
10
−4
10
−2
10
0
10
2
3次元の入力 x1, x2, x3
最適化 — 共役勾配法
目標変数t
– x1:ガウス分布、100個
– x2 はx1+ノイズ
– x3 はランダムなノイズ
– sin(2πx1)+ノイズ
η1 > η2 >>>> η3
@taki0313
- 39.
38/50
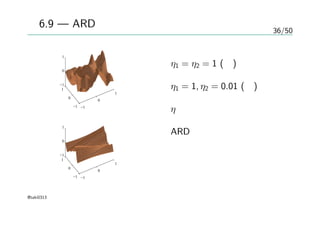
6.4.4 ARD
ARD →指数・2次カーネル
– k(xn, xm) = θ0 exp{−1
2
∑
ηi(xni − xmi)2
} + θ2 + θ3
∑
xnixmi
種々の応用において有用らしいカーネル
@taki0313
- 40.
39/50
6.4.5 ガウス過程による分類
確率的な分類 →事後確率 ∈ (0, 1)
ガウス過程 → 実数値全体 → 活性化関数 → 分類問題
2クラス分類問題 t ∈ {0, 1}
– 関数a(x)上でのガウス過程を考える
– y = σ(a)と変換する
– y ∈ {0, 1}へ落とす
– 1次元の例 — 図6.11
@taki0313
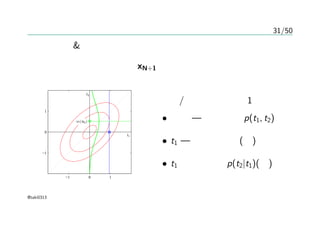
- 41.
40/50
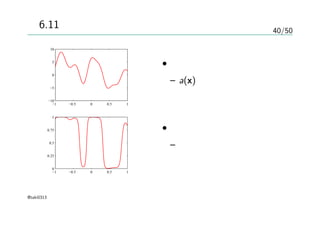
図6.11
−1 −0.5 00.5 1
−10
−5
0
5
10
−1 −0.5 0 0.5 1
0
0.25
0.5
0.75
1
• 上図
– a(x)に対するガウス過程
の事前分布からのサンプ
ル
• 下図
– ロジスティックシグモイ
ド関数で変換した
@taki0313
- 42.
41/50
6.4.5 ガウス過程による分類
目標変数tの確率分布 —ベルヌーイ分布
– p(t|a) = σ(a)t
(1 − σ(a))1−t
入力の訓練集合{x1, · · · , xN}
対応する目標変数の観測値t = (t1, t2 · · · , tN)T
テスト点xN+1 に対するtN+1 を予測
– 予測分布p(tN+1|t)を決定する
– 要素a(x1), · · · , a(xN+1)を持つベクトルaN+1
@taki0313
- 43.
42/50
6.4.5 ガウス過程による分類
ベクトルaN+1 い対するガウス過程による事前分布
–p(aN+1) = N(aN+1|0, CN+1)
– 正しいラベルが付いている → CN にはノイズが入ってない
– 正定値保証のためにパラメータν の項を入れる
– C(xn, xm) = k(xn, xm) + νδnm
– カーネルはパラメータθによって決まる
2クラス分類 — p(tN+1 = 1|tN)を予測する
– p(tN+1 = 1|tN) =
∫
p(tN+1 = 1|aN+1)p(aN+1|tN)daN+1
@taki0313
- 44.
43/50
6.4.5 ガウス過程による分類
p(tN+1 =1|tN) =
∫
p(tN+1 = 1|aN+1)p(aN+1|tN)daN+1
解析的に解けない
– 詳細略
– 漸近的にガウス分布に近づく
– どうやってガウス分布として近似するか
∗ 10.1 変分推論法
∗ 10.7 EP法
∗ 6.4.6 ラプラス近似
@taki0313
- 45.
44/50
6.4.6 ラプラス近似
ベイズの定理 &p(tN|aN+1, aN) = p(tN|aN) より
p(aN+1|tN) =
∫
p(aN+1, aN|tN)daN
=
1
p(tN)
∫
p(aN+1, aN)p(tN|aN+1, aN)daN
=
1
p(tN)
∫
p(aN+1|aN)p(aN)p(tN|aN)daN
=
∫
p(aN+1|aN)p(aN|tN)daN
@taki0313
- 46.
45/50
6.4.6 ラプラス近似
条件付き分布 —(6.66), (6.67)
– p(aN+1|aN) = N(aN+1|kT
C−1
N aN, c − kT
C−1
N k)
積分 → ラプラス近似 & ガウス分布の畳み込み
p(aN) — 平均0, 共分散行列CN であるガウス過程による
データについての項(各々独立として…)
– p(tN|aN) =
∏N
n=1 σ(an)tn(1 − σ(an))1−tn =
∏N
n=1 eantnσ(−an)
@taki0313
- 47.
46/50
6.4.6 ラプラス近似
定数項を無視してラプラス近似
– Ψ(aN)= ln p(aN) + ln p(tN|aN)
= −1
2aT
NCNaN − N
2 ln(2π) − 1
2 ln |CN| + tT
NaN −
∑N
n=1 ln(1 + ean)
– ∇Ψ(aN) = tN − σN − C−1
N aN
σN の要素はσ(an)
– ∇∇Ψ(aN) = −WN − C−1
N
Wは対角要素にσ(an)(1 − σ(an))を持つ正定値行列
dσ
da = σ(1 − σ)(4.88)
正定値行列の和も正定値行列 (演習6.24)
@taki0313
- 48.
47/50
6.4.6 ラプラス近似
ヘッセ行列 A= −∇∇Ψ(aN)が正定値 — 事後分布p(aN|tN)の対
数が凸関数
凸関数 — 極小・極大 = 最小・最大
逐次更新で最適解を目指せる — Newton-Raphson medhot (4.92)
– anew
N = CN(I + WNCN)−1
{tN−σN + WnaN}
– a∗
N に収束するまで — モード
– このとき a∗
N = CN(tN−σN)
収束時のヘッセ行列 H = −∇∇Ψ(aN) = WN + C−1
N
@taki0313
- 49.
- 50.
49/50
6.4.6 ラプラス近似
共分散パラメータθの決定
– 尤度最大化,最尤推定
– 尤度関数p(tN|θ) =
∫
p(tN|aN)p(aN|θ)daN
近似
– ln p(tN|θ) = Ψ(a∗
N) − 1
2 ln |WN + C−1
N | + N
2 ln(2π)
Ψ(a∗
N) = ln p(a∗
N) + ln p(tN|a∗
N)
θの微分がCN とaN の二種類の項が表れる(以下略?)
@taki0313
- 51.

![13/50
生成モデル → カーネル
parametric な生成モデル — p(x|θ)
フィッシャーカーネル
– フィッシャースコア — g(θ, x) = ∇θ ln p(x|θ)
– フィッシャー情報量行列 — F = Eθ[g(θ, x)g(θ, x)T
]
近似 — F ∼ 1
N
∑
g(θ, xn)g(θ, xn)T
– フィッシャーカーネル
∗ k(x, x′
) = g(θ, x)T
F−1
g(θ, x′
)
∗ k(x, x′
) = g(θ, x)T
g(θ, x′
)
@taki0313](https://image.slidesharecdn.com/prmlsec6-101022102256-phpapp02/85/Prml-sec6-14-320.jpg)
![17/50
6.3.1 Nadaraya-Watson Model
§3.3.3 — 新しい入力xに対する予測を線形結合の式で行う
– y(x, mN) =
∑
k(x, xn)tn — 等価カーネル
– 和の制約を満たしている
回帰 密度推定
– 訓練集合 {xn, tn} → p(x, t)の推定 — Parzen推定法(§2.5.1)
– p(x, t) = 1
N
∑
f (x − xn, t − tn) — 各要素を中心に持つ
– 条件付き期待値 が良い — y(x) = E[t|x] =
∫ ∞
−∞
tp(t|x)dt
– E[t|x] =
∫
tpdt
∫
pdt
=
∑
n
∫
tf (x − xn, t − tn)dt
∑
m
∫
f (x − xm, t − tm)dt
@taki0313](https://image.slidesharecdn.com/prmlsec6-101022102256-phpapp02/85/Prml-sec6-18-320.jpg)
![18/50
6.3.1 Nadaraya-Watson Model
y(x) = E[t|x] =
∫
tpdt
∫
pdt
=
∑
n
∫
tf (x − xn, t − tn)dt
∑
m
∫
f (x − xm, t − tm)dt
簡単化 — 各要素の平均は0 —
∫
tf (x, t)dt = 0
変数置換 → Nadaraya-Watson Model
– y(x) =
∑
n g(x − xn)tn/
∑
m g(x − xm) =
∑
n k(x, xn)tn
– g(x) =
∫ ∞
−∞
f (x, t)dt
– k(x, xn) = g(x − xn)/
∑
m g(x − xm)
@taki0313](https://image.slidesharecdn.com/prmlsec6-101022102256-phpapp02/85/Prml-sec6-19-320.jpg)
![22/50
6.4.1 線形回帰の復習
線形回帰モデルy(x) = wT
φ(x)
パラメータの事前分布 p(w) = N(w|0, α−1
I)
入力 {x1, x2, · · · , xN}による評価
{y(x1), y(x2), · · · , y(xN)}による評価
→ {yn}, y = (y1, y2, · · · , yN)T
を評価する
– E[y] = ΦE[w] = 0
– Cov[y] = ΦCov[wwT
]ΦT
= 1
αΦΦT
= K
– Knm = k(xn, xm) = 1
α φ(xn)T
φ(xm)
線形回帰はガウス過程の特殊な場合
@taki0313](https://image.slidesharecdn.com/prmlsec6-101022102256-phpapp02/85/Prml-sec6-23-320.jpg)
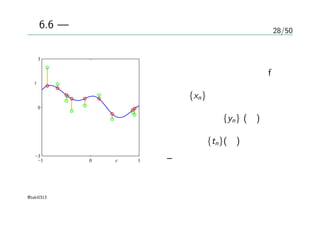
![23/50
ガウス過程
同時分布の性質が平均、共分散で完全に記述される
– 平均(1次モーメント) =0とする = p(w|α)の平均を0
– ガウス過程 ← カーネル関数 — E[y(xn), y(xm)] = k(xn, xm)
−1 −0.5 0 0.5 1
−3
−1.5
0
1.5
3
−1 −0.5 0 0.5 1
−3
−1.5
0
1.5
3
カーネル&ガウス過程から取り出した関数
@taki0313](https://image.slidesharecdn.com/prmlsec6-101022102256-phpapp02/85/Prml-sec6-24-320.jpg)
![48/50
6.4.6 ラプラス近似
収束時の、事後分布p(aN|tN)のガウス分布による近似
– q(aN) = N(aN|a∗
N, H−1
)
2つのガウス分布の畳み込み積分の評価 — 2章
– E[aN+1|tN] = kT
(tN − σN)
– var[aN+1|tN] = c − kT
(W−1
N + CN)−1
k
→ガウス分布の情報が得られたので…
@taki0313](https://image.slidesharecdn.com/prmlsec6-101022102256-phpapp02/85/Prml-sec6-49-320.jpg)