指数型分布族
最尤推定Ⅰ
関数 𝑔(η) が分布を正規化するための係数と解釈でき
𝑔η ℎ x exp η 𝑇 𝒖 x 𝑑x = 1
η について微分をすると,
𝛻𝑔 η ℎ x exp η 𝑇 𝒖 x 𝑑x + 𝑔 η ℎ x exp η 𝑇 𝒖 x 𝒖 x 𝑑x = 0
整理すると, −
𝛻𝑔 η
𝑔 η = 𝑔 η ℎ x exp η 𝑇
𝒖 x 𝒖 x 𝑑x = E[𝒖 x ]
−𝛻ln𝑔 η = E[𝒖 x ]
𝒖 x の期待値は 𝑔(η) で表現可能,共分散も同様
41
指数型分布族の一般形 𝑝 x η = ℎ x 𝑔 η)exp{η 𝑇 𝒖 x の
パラメータベクトル η の推定








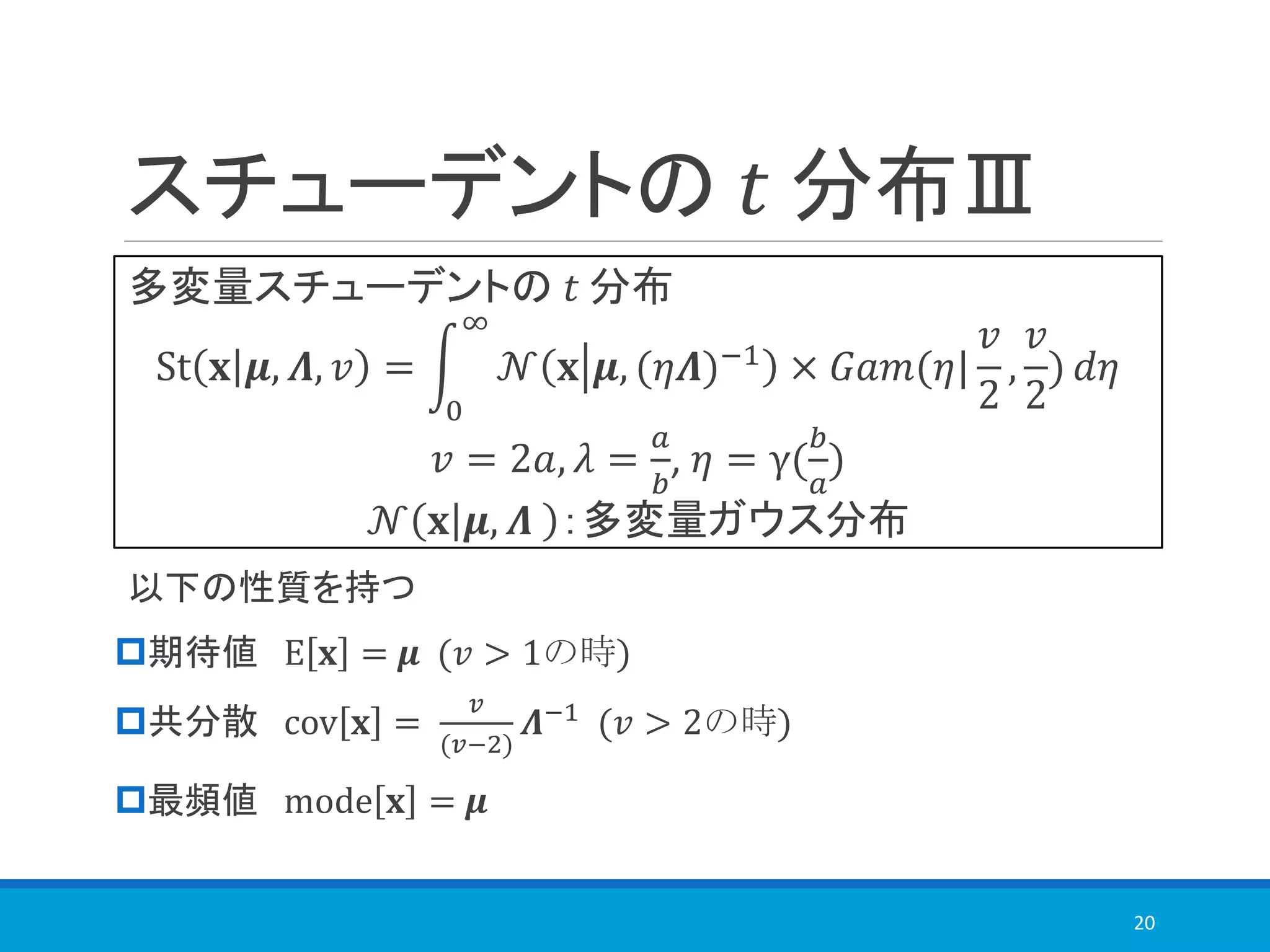
![周期変数Ⅲ
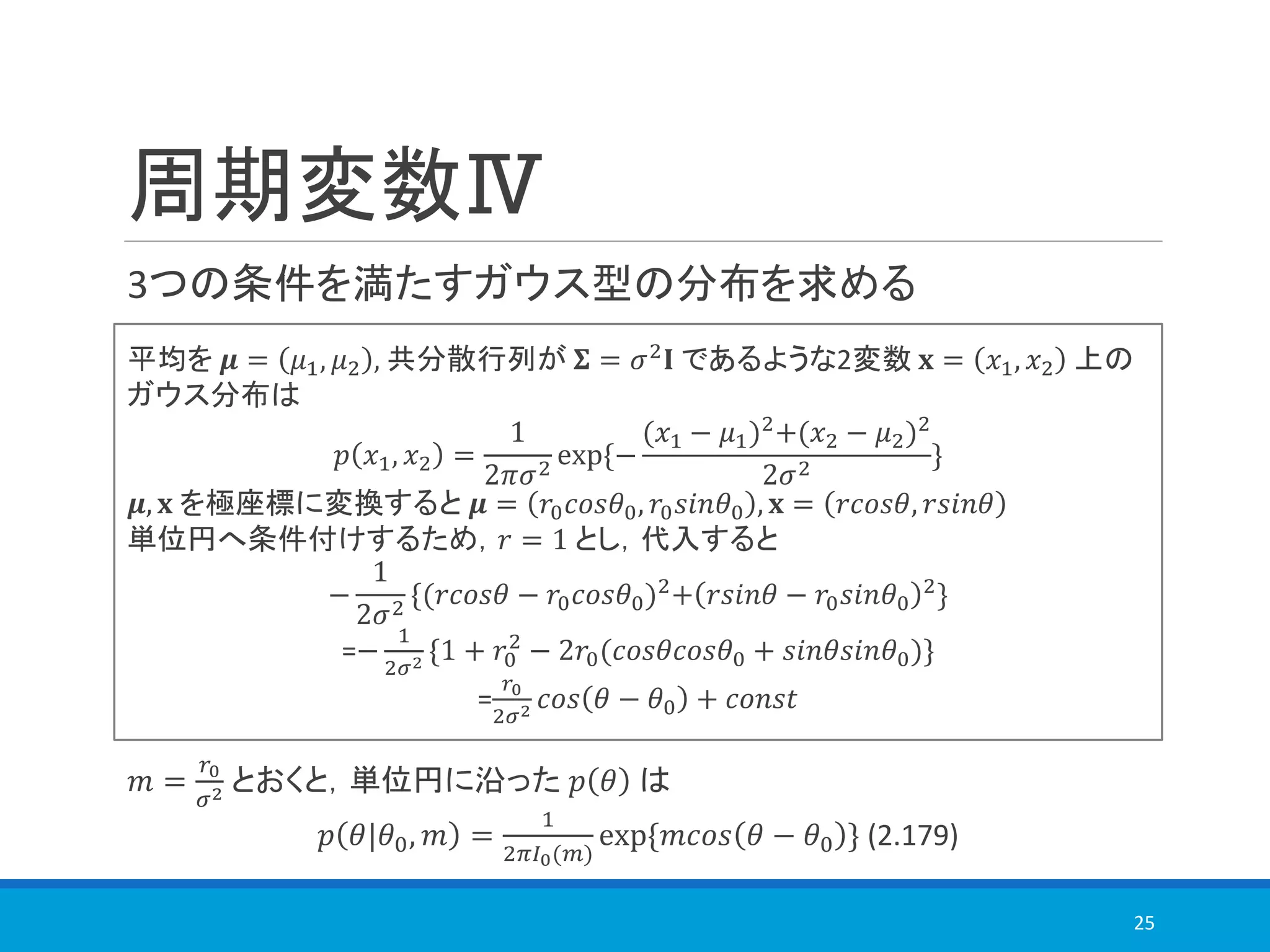
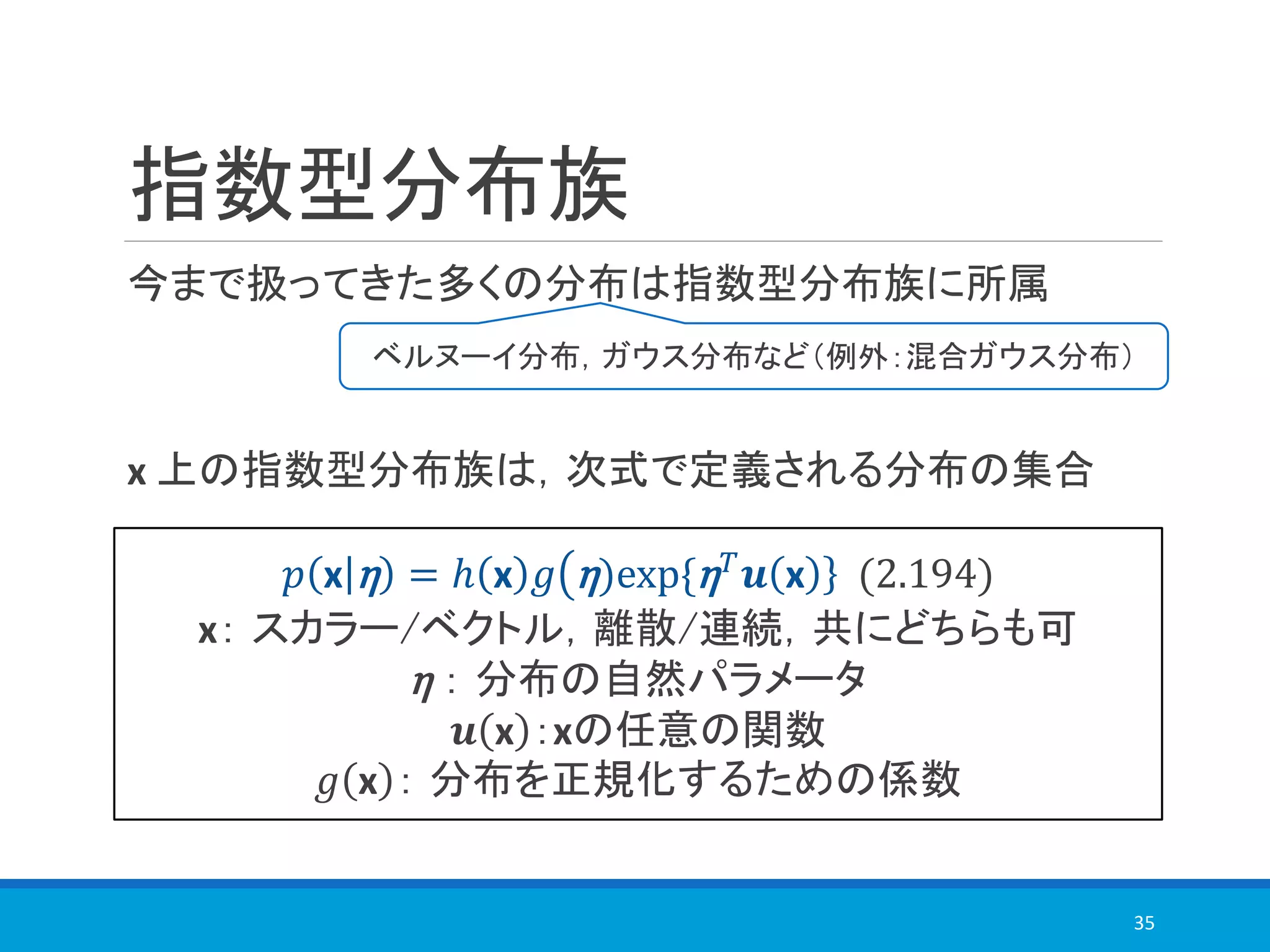
周期2𝜋の分布 𝑝(𝜃) について,1変数の場合満たすべき条件は以下の3つ
𝑝 𝜃 ≥ 0
0
2𝜋
𝑝 𝜃 𝑑𝜃 = 1
𝑝 𝜃 + 2𝜋 = 𝑝 𝜃
24
ガウス分布の周期変数への一般化(フォン・ミーゼス分布)
[1]https://ja.wikipedia.org/wiki/フォン・ミーゼス分布
フォン・ミーゼス分布は青の密度等高線を
持つような2次元ガウス分布に対して
赤の単位円で条件付けし導出(右下図)
3次元化](https://image.slidesharecdn.com/prml2-181113044458/75/PRML-2-3-6-2-5-2-24-2048.jpg)











![指数型分布族
最尤推定Ⅰ
関数 𝑔(η) が分布を正規化するための係数と解釈でき
𝑔 η ℎ x exp η 𝑇 𝒖 x 𝑑x = 1
η について微分をすると,
𝛻𝑔 η ℎ x exp η 𝑇 𝒖 x 𝑑x + 𝑔 η ℎ x exp η 𝑇 𝒖 x 𝒖 x 𝑑x = 0
整理すると, −
𝛻𝑔 η
𝑔 η = 𝑔 η ℎ x exp η 𝑇
𝒖 x 𝒖 x 𝑑x = E[𝒖 x ]
−𝛻ln𝑔 η = E[𝒖 x ]
𝒖 x の期待値は 𝑔(η) で表現可能,共分散も同様
41
指数型分布族の一般形 𝑝 x η = ℎ x 𝑔 η)exp{η 𝑇 𝒖 x の
パラメータベクトル η の推定](https://image.slidesharecdn.com/prml2-181113044458/75/PRML-2-3-6-2-5-2-41-2048.jpg)


















































![[PRML] パターン認識と機械学習(第2章:確率分布)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter2-171002030018-thumbnail.jpg?width=640&height=640&fit=bounds)

![[PRML] パターン認識と機械学習(第1章:序論)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter1-170903070406-thumbnail.jpg?width=640&height=640&fit=bounds)