Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
CI
Uploaded by
Chika Inoshita
5,116 views
第8章 ガウス過程回帰による異常検知
機械学習プロフェッショナルシリーズ 異常検知と変化検知 第8章 ガウス過程回帰による異常検知
Data & Analytics
◦
Read more
12
Save
Share
Embed
Embed presentation
Download
Downloaded 74 times
1
/ 40
2
/ 40
Most read
3
/ 40
4
/ 40
5
/ 40
6
/ 40
7
/ 40
8
/ 40
9
/ 40
10
/ 40
11
/ 40
12
/ 40
13
/ 40
14
/ 40
15
/ 40
16
/ 40
17
/ 40
18
/ 40
19
/ 40
20
/ 40
21
/ 40
22
/ 40
23
/ 40
24
/ 40
25
/ 40
26
/ 40
27
/ 40
28
/ 40
29
/ 40
30
/ 40
31
/ 40
32
/ 40
Most read
33
/ 40
34
/ 40
35
/ 40
Most read
36
/ 40
37
/ 40
38
/ 40
39
/ 40
40
/ 40
More Related Content
PDF
混合モデルとEMアルゴリズム(PRML第9章)
by
Takao Yamanaka
PDF
ELBO型VAEのダメなところ
by
KCS Keio Computer Society
PDF
SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向
by
SSII
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
PDF
グラフニューラルネットワーク入門
by
ryosuke-kojima
PDF
非ガウス性を利用した 因果構造探索
by
Shiga University, RIKEN
PDF
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
PDF
Disentanglement Survey:Can You Explain How Much Are Generative models Disenta...
by
Hideki Tsunashima
混合モデルとEMアルゴリズム(PRML第9章)
by
Takao Yamanaka
ELBO型VAEのダメなところ
by
KCS Keio Computer Society
SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向
by
SSII
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
グラフニューラルネットワーク入門
by
ryosuke-kojima
非ガウス性を利用した 因果構造探索
by
Shiga University, RIKEN
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
Disentanglement Survey:Can You Explain How Much Are Generative models Disenta...
by
Hideki Tsunashima
What's hot
PDF
機械学習モデルの列挙
by
Satoshi Hara
PDF
サポートベクターマシン(SVM)の数学をみんなに説明したいだけの会
by
Kenyu Uehara
PDF
パターン認識と機械学習 13章 系列データ
by
emonosuke
PDF
「内積が見えると統計学も見える」第5回 プログラマのための数学勉強会 発表資料
by
Ken'ichi Matsui
PPTX
劣微分
by
ShintaUrakami
PPTX
ベイズ統計学の概論的紹介
by
Naoki Hayashi
PDF
因果探索: 基本から最近の発展までを概説
by
Shiga University, RIKEN
PDF
基礎からのベイズ統計学 輪読会資料 第4章 メトロポリス・ヘイスティングス法
by
Ken'ichi Matsui
PDF
アンサンブル木モデル解釈のためのモデル簡略化法
by
Satoshi Hara
PDF
Prml4.4 ラプラス近似~ベイズロジスティック回帰
by
Yuki Matsubara
PDF
Control as Inference (強化学習とベイズ統計)
by
Shohei Taniguchi
PDF
構造方程式モデルによる因果推論: 因果構造探索に関する最近の発展
by
Shiga University, RIKEN
PDF
PRML 8.2 条件付き独立性
by
sleepy_yoshi
PDF
数式を綺麗にプログラミングするコツ #spro2013
by
Shuyo Nakatani
PDF
スパースモデリング入門
by
Hideo Terada
PDF
PRML 第4章
by
Akira Miyazawa
PDF
最適化超入門
by
Takami Sato
PPTX
【解説】 一般逆行列
by
Kenjiro Sugimoto
PDF
グラフィカル Lasso を用いた異常検知
by
Yuya Takashina
PDF
最適輸送入門
by
joisino
機械学習モデルの列挙
by
Satoshi Hara
サポートベクターマシン(SVM)の数学をみんなに説明したいだけの会
by
Kenyu Uehara
パターン認識と機械学習 13章 系列データ
by
emonosuke
「内積が見えると統計学も見える」第5回 プログラマのための数学勉強会 発表資料
by
Ken'ichi Matsui
劣微分
by
ShintaUrakami
ベイズ統計学の概論的紹介
by
Naoki Hayashi
因果探索: 基本から最近の発展までを概説
by
Shiga University, RIKEN
基礎からのベイズ統計学 輪読会資料 第4章 メトロポリス・ヘイスティングス法
by
Ken'ichi Matsui
アンサンブル木モデル解釈のためのモデル簡略化法
by
Satoshi Hara
Prml4.4 ラプラス近似~ベイズロジスティック回帰
by
Yuki Matsubara
Control as Inference (強化学習とベイズ統計)
by
Shohei Taniguchi
構造方程式モデルによる因果推論: 因果構造探索に関する最近の発展
by
Shiga University, RIKEN
PRML 8.2 条件付き独立性
by
sleepy_yoshi
数式を綺麗にプログラミングするコツ #spro2013
by
Shuyo Nakatani
スパースモデリング入門
by
Hideo Terada
PRML 第4章
by
Akira Miyazawa
最適化超入門
by
Takami Sato
【解説】 一般逆行列
by
Kenjiro Sugimoto
グラフィカル Lasso を用いた異常検知
by
Yuya Takashina
最適輸送入門
by
joisino
Similar to 第8章 ガウス過程回帰による異常検知
PDF
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
PPT
050 確率と確率分布
by
t2tarumi
PDF
Bishop prml 9.3_wk77_100408-1504
by
Wataru Kishimoto
PDF
Prml2.1 2.2,2.4-2.5
by
Takuto Kimura
PPTX
異常検知と変化検知の1~3章をまとめてみた
by
Takahiro Yoshizawa
PDF
PRML2.1 2.2
by
Takuto Kimura
PDF
統計的因果推論 勉強用 isseing333
by
Issei Kurahashi
PDF
PRML セミナー
by
sakaguchi050403
PDF
Infomation geometry(overview)
by
Yoshitake Misaki
PDF
PRML_titech 2.3.1 - 2.3.7
by
Takafumi Sakakibara
PDF
自由エネルギー原理入門: 正規分布を仮定した場合
by
Masatoshi Yoshida
PPTX
Prml 1.3~1.6 ver3
by
Toshihiko Iio
PDF
確率解析計算
by
Yusuke Matsushita
PDF
Draftall
by
Toshiyuki Shimono
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
PDF
Oshasta em
by
Naotaka Yamada
PDF
PRML10-draft1002
by
Toshiyuki Shimono
PPTX
GEE(一般化推定方程式)の理論
by
Koichiro Gibo
PDF
Bishop prml 10.2.2-10.2.5_wk77_100412-0059
by
Wataru Kishimoto
PDF
PRML chap.10 latter half
by
Narihira Takuya
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
050 確率と確率分布
by
t2tarumi
Bishop prml 9.3_wk77_100408-1504
by
Wataru Kishimoto
Prml2.1 2.2,2.4-2.5
by
Takuto Kimura
異常検知と変化検知の1~3章をまとめてみた
by
Takahiro Yoshizawa
PRML2.1 2.2
by
Takuto Kimura
統計的因果推論 勉強用 isseing333
by
Issei Kurahashi
PRML セミナー
by
sakaguchi050403
Infomation geometry(overview)
by
Yoshitake Misaki
PRML_titech 2.3.1 - 2.3.7
by
Takafumi Sakakibara
自由エネルギー原理入門: 正規分布を仮定した場合
by
Masatoshi Yoshida
Prml 1.3~1.6 ver3
by
Toshihiko Iio
確率解析計算
by
Yusuke Matsushita
Draftall
by
Toshiyuki Shimono
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
Oshasta em
by
Naotaka Yamada
PRML10-draft1002
by
Toshiyuki Shimono
GEE(一般化推定方程式)の理論
by
Koichiro Gibo
Bishop prml 10.2.2-10.2.5_wk77_100412-0059
by
Wataru Kishimoto
PRML chap.10 latter half
by
Narihira Takuya
第8章 ガウス過程回帰による異常検知
1.
異異常検知と変化検知 第8章 ガウス過程回帰による異異常検知 @progranate
2.
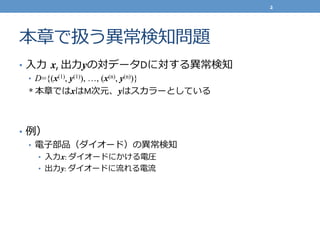
本章で扱う異異常検知問題 • ⼊入⼒力力 x,
出⼒力力yの対データDに対する異異常検知 • D={(x(1), y(1)), …, (x(n), y(n))} * 本章ではxはM次元、yはスカラーとしている • 例例) • 電⼦子部品(ダイオード)の異異常検知 • ⼊入⼒力力x: ダイオードにかける電圧 • 出⼒力力y: ダイオードに流流れる電流流 2
3.
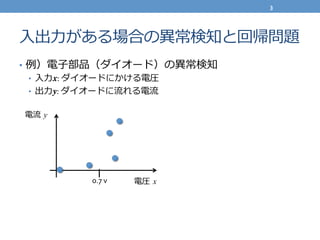
⼊入出⼒力力がある場合の異異常検知と回帰問題 • 例例)電⼦子部品(ダイオード)の異異常検知 •
⼊入⼒力力x: ダイオードにかける電圧 • 出⼒力力y: ダイオードに流流れる電流流 電圧 x 電流流 y 0.7 v 3
4.
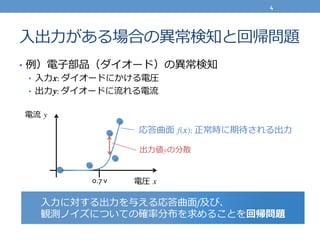
⼊入出⼒力力がある場合の異異常検知と回帰問題 • 例例)電⼦子部品(ダイオード)の異異常検知 •
⼊入⼒力力x: ダイオードにかける電圧 • 出⼒力力y: ダイオードに流流れる電流流 電圧 x 電流流 y 0.7 v 応答曲⾯面 f(x): 正常時に期待される出⼒力力 出⼒力力値yの分散 ⼊入⼒力力に対する出⼒力力を与える応答曲⾯面f及び、 観測ノイズについての確率率率分布を求めることを回帰問題 4
5.
ガウス過程回帰とは 5
6.
ガウス過程回帰 • 特徴 •
汎⽤用性の⾼高い⾮非線形回帰⼿手法 • 応答曲⾯面f(x)を確率率率モデルp(f(x)|D)の形で構築 • ガウス過程回帰のモデルが持つ2つの要素 1. 観測時のノイズを表す確率率率モデル p(y|x,σ2) 2. 応答曲⾯面f(x)の滑滑らかさを表現する事前分布 p(fN) 6
7.
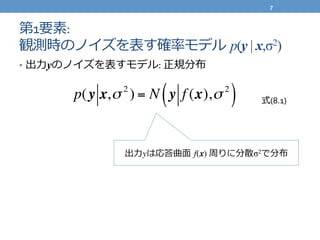
第1要素: 観測時のノイズを表す確率率率モデル p(y
| x,σ2) • 出⼒力力yのノイズを表すモデル: 正規分布 出⼒力力yは応答曲⾯面 f(x) 周りに分散σ2で分布 p(y x,σ 2 ) = N y f (x),σ 2 ( ) 式(8.1) 7
8.
第2要素: 応答曲⾯面 f(x)
の滑滑らかさを表現する事前分布 p(fN) (1/2) • ⼊入⼒力力がx, x’の2つの場合 • 任意の⼊入⼒力力x, x’における応答曲⾯面の値をf(x), f(x’)とする時、 f(x)とf(x’)は次のような確率率率分布に従う p f (x) f (x') ! " # # $ % & & = N 0, K(x, x) K(x, x') K(x', x) K(x', x') ' ( ) ) * + , , ! " # # $ % & & K(x, x’): カーネル関数 xとx’が近い値のとき⼩小さい値を取る →⼊入⼒力力値が近いと出⼒力力値も近いよねという制約 式(8.3) 8
9.
第2要素: 応答曲⾯面 f(x)
の滑滑らかさを表現する事前分布 p(fN) (2/2) • ⼊入⼒力力がx(1), …, x(N)のN個の場合 • 任意の⼊入⼒力力x(1), …, x(N)における応答曲⾯面の値をf(x(1)), …, f(x(N))とする時、fNは次のような確率率率分布に従う p( fN ) = N( fN | 0,K) fN = ( f (x(1) ),…, f (x(N ) ))T K: (i, j)成分がK(x(i), x(j))で与えられる⾏行行列列 * 無限個の⼊入⼒力力点を考えると無限次元の正規分布となる 式(8.5) 式(8.4) 9
10.
事前分布N(fN | 0,K)から抽出したf(x)の様⼦子 •
図8.2 • xは⼀一次元、N=50で[-5, 5]の範囲を区分してf(x)を抽出 fNは離離散値であるが、 事前分布により連続の関数値のように⾒見見える 10
11.
ガウス過程の問題設定と式の導出 11
12.
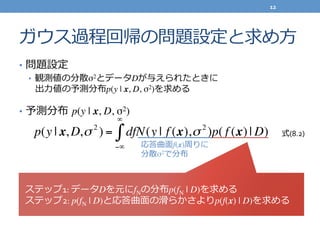
ガウス過程回帰の問題設定と求め⽅方 • 問題設定 •
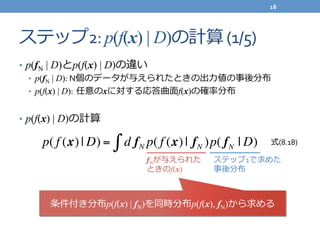
観測値の分散σ2とデータDが与えられたときに 出⼒力力値の予測分布p(y | x, D, σ2)を求める • 予測分布 p(y | x, D, σ2) p(y | x, D,σ 2 ) = dfN(y | f (x),σ 2 ) −∞ ∞ ∫ p( f (x)| D) 応答曲⾯面f(x)周りに 分散σ2で分布 ステップ1: データDを元にfNの分布p(fN | D)を求める ステップ2: p(fN | D)と応答曲⾯面の滑滑らかさよりp(f(x) | D)を求める 式(8.2) 12
13.
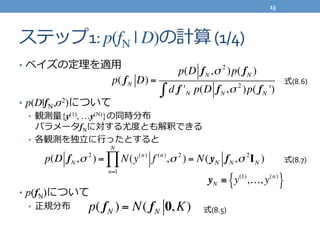
ステップ1: p(fN |
D)の計算 (1/4) • ベイズの定理理を適⽤用 • p(D|fN,σ2)について • 観測量量{y(1), …y(N)}の同時分布 パラメータfNに対する尤度度とも解釈できる • 各観測を独⽴立立に⾏行行ったとすると • p(fN)について • 正規分布 p( fN D) = p(D fN,σ 2 )p( fN ) d f 'N p(D fN,σ 2 )p( fN ')∫ p(D fN,σ 2 ) = N(y(n) f (n) ,σ 2 ) = N(yN fN,σ 2 IN ) n=1 N ∏ p( fN ) = N( fN 0,K) yN ≡ y(1) ,…, y(n) { } 式(8.6) 式(8.7) 式(8.5) 13
14.
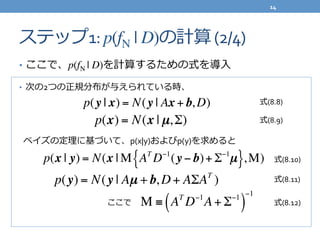
ステップ1: p(fN |
D)の計算 (2/4) • ここで、p(fN | D)を計算するための式を導⼊入 • 次の2つの正規分布が与えられている時、 ベイズの定理理に基づいて、p(x|y)およびp(y)を求めると p(y | x) = N(y | Ax + b, D) p(x) = N(x | µ,Σ) p(x | y) = N(x | M AT D−1 (y − b)+ Σ−1 µ{ },M) p(y) = N(y | Aµ +b, D + AΣAT ) M ≡ AT D−1 A+ Σ−1 ( ) −1 ここで 式(8.8) 式(8.9) 式(8.10) 式(8.11) 式(8.12) 14
15.
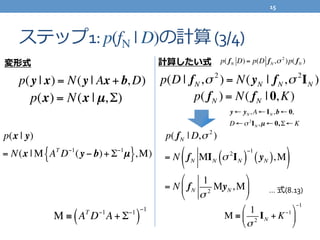
ステップ1: p(fN |
D)の計算 (3/4) p(y | x) = N(y | Ax + b, D) p(x) = N(x | µ,Σ) p(x | y) = N(x | M AT D−1 (y − b)+ Σ−1 µ{ },M) M ≡ AT D−1 A+ Σ−1 ( ) −1 p(D | fN,σ 2 ) = N(yN | fN,σ 2 IN ) p( fN ) = N( fN | 0,K) p( fN | D,σ 2 ) = N fN MIN σ 2 IN( ) −1 yN( ),M( ) = N fN 1 σ 2 MyN,M " # $ % & ' M ≡ 1 σ 2 IN + K−1# $ % & ' ( −1 変形式 計算したい式 y ← yN, A ← IN,b ← 0, D ←σ 2 IN,µ ← 0, Σ ← K p( fN D) = p(D fN,σ 2 )p( fN ) … 式(8.13) 15
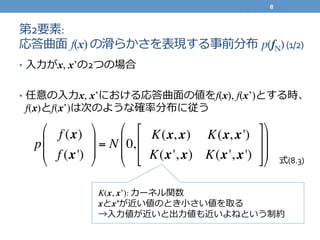
16.
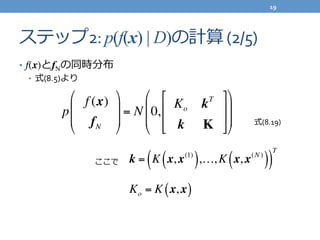
ステップ1: p(fN |
D)の計算 (4/4) • Mの変形 M ≡ 1 σ 2 IN + K−1# $ % & ' ( −1 ウッドベリー⾏行行列列恒等式 A+ BDC[ ] −1 = A−1 − A−1 B D−1 +CA−1 B!" #$ −1 CA−1 式(8.14) M ≡ 1 σ 2 IN ! " # $ % & −1 − 1 σ 2 IN ! " # $ % & −1 IN K + IN 1 σ 2 IN ! " # $ % & −1 IN ! " ## $ % &&IN 1 σ 2 IN ! " # $ % & −1 =σ 2 IN −σ 2 K +σ 2 IN( ) −1 ( ) 式(8.16) 式(8.17)M ≡σ 2 K K +σ 2 IN( ) −1 両辺に(K+σ2IN)をかける 16
17.
ステップ1で求めたfNの事後分布p(fN | D) •
σ2が⼩小さければfNはyNに張り付く • 事前分布p(fN)のみでは、様々な関数をとることができたが、 データD=(yN)により、関数に制限をかける p( fN | D,σ 2 ) = N fN 1 σ 2 MyN,M ! " # $ % & M ≡σ 2 K K +σ 2 IN( ) −1 ただし 式(8.13) 式(8.17) 17
18.
ステップ2: p(f(x) |
D)の計算 (1/5) • p(fN | D)とp(f(x) | D)の違い • p(fN | D): N個のデータが与えられたときの出⼒力力値の事後分布 • p(f(x) | D): 任意のxに対する応答曲⾯面f(x)の確率率率分布 • p(f(x) | D)の計算 p( f (x)| D) = d fN p( f (x)| fN )p( fN | D)∫ fNが与えられた ときのf(x) ステップ1で求めた 事後分布 式(8.18) 条件付き分布p(f(x) | fN)を同時分布p(f(x), fN)から求める 18
19.
ステップ2: p(f(x) |
D)の計算 (2/5) • f(x)とfNの同時分布 • 式(8.5)より p f (x) fN ! " # # $ % & & = N 0, Ko kT k K ' ( ) ) * + , , ! " # # $ % & & 式(8.19) ここで k = K x, x(1) ( ),…,K x, x(N ) ( )( ) T Ko = K x, x( ) 19
20.
ステップ2: p(f(x) |
D)の計算 (3/5) • 正規分布の分割公式 • 確率率率変数xを • 合わせて平均µ,共分散⾏行行列列∑を以下のように分割 • ここでxが正規分布N(x| µ, ∑)に従うとき、 xbを与えた時のxaの条件付き分布N(xa|µa|b, ∑a|b)の平均、分散は x = xa xb ! " # # $ % & & µ = µa µb ! " # # $ % & & Σ = Σaa Σab Σba Σbb " # $ $ % & ' ' µa|b = µa + ΣabΣbb −1 xb − µb( ) 式(8.20) Σa|b = Σaa − ΣabΣbb −1 Σba 式(8.21) 式(8.23) 20
21.
ステップ2: p(f(x) |
D)の計算 (4/5) • 分割公式にfNとf(x)の同時分布を当てはめ • 式(8.21)と(8.23)より • よって x = xa xb ! " # # $ % & & µ = µa µb ! " # # $ % & & Σ = Σaa Σab Σba Σbb " # $ $ % & ' ' f = f (x) fN ! " # # $ % & & µ = 0 0 ! " # $ % & Σ = Ko kT k K " # $ $ % & ' ' µa|b = kT K−1 ( fN − 0) = kT K−1 fN Σa|b = Ko − kT K−1 k p f (x) fN( )= N f (x) kT K−1 fN,Ko − kT K−1 k( ) 式(8.27) 21
22.
ステップ2: p(f(x) |
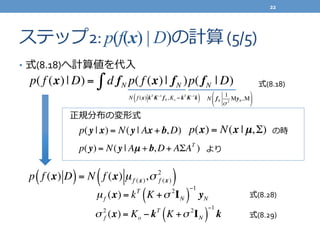
D)の計算 (5/5) • 式(8.18)へ計算値を代⼊入 p( f (x)| D) = d fN p( f (x)| fN )p( fN | D)∫ 式(8.18) N f (x) kT K−1 fN,Ko − kT K−1 k( ) N fN 1 σ 2 MyN,M ! " # $ % & p f (x) D( )= N f (x) µf (x),σ 2 f (x)( ) µf (x) = kT K +σ 2 IN( ) −1 yN σ 2 f (x) = Ko − kT K +σ 2 IN( ) −1 k 式(8.28) 式(8.29) p(y | x) = N(y | Ax + b, D) p(x) = N(x | µ,Σ) p(y) = N(y | Aµ +b, D + AΣAT ) 正規分布の変形式 の時 より 22
23.
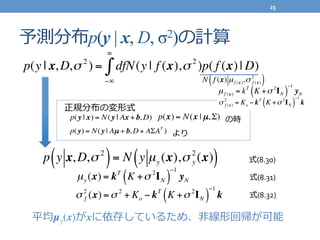
p(y | x)
= N(y | Ax + b, D) p(x) = N(x | µ, Σ) p(y) = N(y | Aµ +b, D + AΣAT ) 正規分布の変形式 の時 より 予測分布p(y | x, D, σ2)の計算 p(y | x, D,σ 2 ) = dfN(y | f (x),σ 2 ) −∞ ∞ ∫ p( f (x)| D) N f (x) µf (x),σ 2 f (x)( ) µf (x) = kT K +σ 2 IN( ) −1 yN σ 2 f (x) = Ko − kT K +σ 2 IN( ) −1 k p y x, D,σ 2 ( )= N y µy (x),σ 2 y (x)( ) µy (x) = kT K +σ 2 IN( ) −1 yN σ 2 f (x) =σ 2 + Ko − kT K +σ 2 IN( ) −1 k 式(8.31) 式(8.32) 式(8.30) 平均μy(x)がxに依存しているため、⾮非線形回帰が可能 23
24.
異異常度度の定義 24
25.
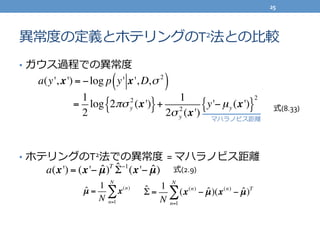
異異常度度の定義とホテリングのT2法との⽐比較 • ガウス過程での異異常度度 •
ホテリングのT2法での異異常度度 = マハラノビス距離離 a(x') = (x'− ˆµ)T ˆΣ−1 (x'− ˆµ) ˆµ = 1 N x(n) n=1 N ∑ 式(2.9) ˆΣ = 1 N (x(n) − ˆµ)(x(n) − ˆµ)T n=1 N ∑ a(y', x') = −log p y' x', D,σ 2 ( ) = 1 2 log 2πσy 2 (x'){ }+ 1 2σy 2 (x') y'−µy (x'){ } 2 式(8.33) マハラノビス距離離 25
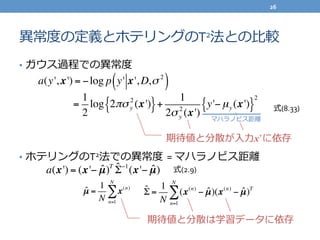
26.
異異常度度の定義とホテリングのT2法との⽐比較 • ガウス過程での異異常度度 •
ホテリングのT2法での異異常度度 = マハラノビス距離離 a(y', x') = −log p y' x', D,σ 2 ( ) = 1 2 log 2πσy 2 (x'){ }+ 1 2σy 2 (x') y'−µy (x'){ } 2 a(x') = (x'− ˆµ)T ˆΣ−1 (x'− ˆµ) ˆµ = 1 N x(n) n=1 N ∑ 式(8.33) 式(2.9) ˆΣ = 1 N (x(n) − ˆµ)(x(n) − ˆµ)T n=1 N ∑ 期待値と分散が⼊入⼒力力x’に依存 期待値と分散は学習データに依存 マハラノビス距離離 26
27.
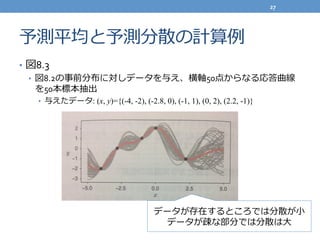
予測平均と予測分散の計算例例 • 図8.3 •
図8.2の事前分布に対しデータを与え、横軸50点からなる応答曲線 を50本標本抽出 • 与えたデータ: (x, y)={(-4, -2), (-2.8, 0), (-1, 1), (0, 2), (2.2, -1)} データが存在するところでは分散が⼩小 データが疎な部分では分散は⼤大 27
28.
パラメータの決定⼿手法 28
29.
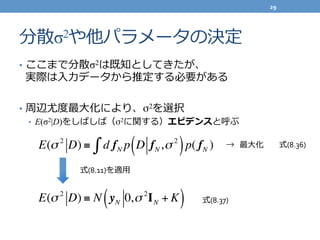
分散σ2や他パラメータの決定 • ここまで分散σ2は既知としてきたが、 実際は⼊入⼒力力データから推定する必要がある
• 周辺尤度度最⼤大化により、σ2を選択 • E(σ2|D)をしばしば(σ2に関する)エビデンスと呼ぶ E(σ 2 D) ≡ d fN p D fN,σ 2 ( )p( fN )∫ → 最⼤大化 式(8.11)を適⽤用 E(σ 2 D) ≡ N yN 0,σ 2 IN + K( ) 式(8.36) 式(8.37) 29
30.
分散σ2や他パラメータの決定 • カーネル⾏行行列列からσ2の抜き出し • 対数エビデンス •
σ-2で微分し、整理理すると K =σ 2 !K logE(σ 2 D) ≡ − N 2 log(2πσ 2 )− 1 2 log IN + !K − σ −2 2 yN T IN + !K( ) −1 yN ˆσ 2 ≡ 1 N yN T IN + !K( ) −1 yN Kのカーネルのパラメータも同様に 周辺尤度度最⼤大化で求める(詳細はp103にて) 式(8.38) 式(8.39) 30
31.
実験計画法への応⽤用 31
32.
実験計画法への応⽤用 • 実験計画法 •
効率率率良良い実験⽅方法を設計し、結果を適切切に解析する(wikipediaより) • 例例) • ⾃自動⾞車車の衝突シミュレーション 設計パラメータ:x、 評価値: y 過去N回のシミュレーション結果 を活⽤用して、 次にシミュレーションするべき最適なxは何か?を決定 D = (x(1) , y(1) ),…,(x(N ) , y(N ) ){ } 32
33.
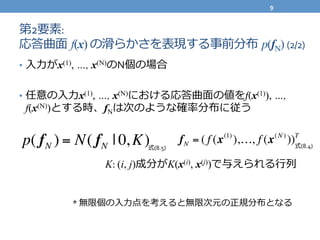
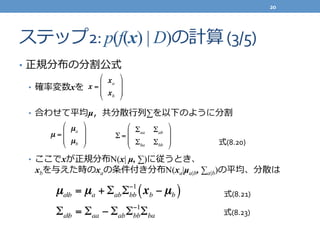
最適性の定義: 期待改善量量 • 評価値yは⼩小さければ⼩小さいほど良良いという仮定
• ymin: Dに含まれるN個の評価値の中での最⼩小値(最善値) • []+は正なら何もせず、負なら0に置き換え J(x) = dyp(y | x, D,σ 2 ) −∞ ∞ ∫ ymin − y[ ]+ 式(8.42) 33
34.
期待改善量量の計算 J(x) = dyN(y
| µy (x),σy 2 (x)) −∞ ymin ∫ (ymin − y) = duN(u | 0,1)(ymin −uσy (x)−µy (x)) −∞ ymin−µy σy ∫ =σy (x) zΦ(z)+ N(z | 0,1)[ ] z = ymin −µy (x) σy (x) Φ(v) = du −∞ u ∫ N(u | 0,1) − d du N(u | 0,1) = uN(u | 0,1) J(x) = dyp(y | x, D,σ 2 ) −∞ ∞ ∫ ymin − y[ ]+ 式(8.43) 式(8.44) 予測分布の式と より 34
35.
期待改善量量の解釈 • ここでzがある程度度⼤大きいとき[]内はzに⽐比例例
• σyはDにおける疎な領領域で⼤大きくなる(図8.3より)ため 期待改善量量を最⼤大にするxは、 「これまであまり試していない領領域でzが⼤大きくなる値」 J(x) =σy (x) zΦ(z)+ N(z | 0,1)[ ] J(x) ≈ σy (x)× z(x)[ ]+ 式(8.43) 式(8.45) 35
36.
リッジ回帰との関係 36
37.
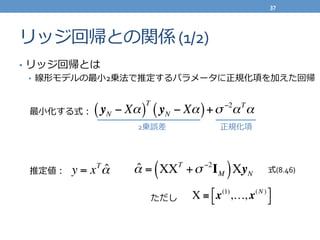
リッジ回帰との関係 (1/2) • リッジ回帰とは
• 線形モデルの最⼩小2乗法で推定するパラメータに正規化項を加えた回帰 y = xT ˆα ˆα = XXT +σ −2 IM( )XyN X ≡ x(1) ,…, x(N )"# $% yN − Xα( ) T yN − Xα( )+σ −2 αT α最⼩小化する式: 2乗誤差 正規化項 推定値: ただし 式(8.46) 37
38.
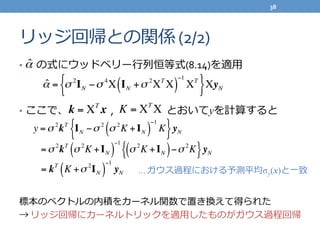
リッジ回帰との関係 (2/2) • の式にウッドベリー⾏行行列列恒等式(8.14)を適⽤用
• ここで、 , とおいてyを計算すると 標本のベクトルの内積をカーネル関数で置き換えて得られた → リッジ回帰にカーネルトリックを適⽤用したものがガウス過程回帰 ˆα = σ 2 IN −σ 4 X IN +σ 2 XT X( ) −1 XT { }XyN ˆα k = XT x K = XT X y =σ 2 kT IN −σ 2 σ 2 K + IN( ) −1 K{ }yN =σ 2 kT σ 2 K +IN( ) −1 σ 2 K +IN( )−σ 22 K{ }yN = kT K +σ 2 IN( ) −1 yN … ガウス過程における予測平均σy(x)と⼀一致 38
39.
8章のまとめ 39
40.
まとめ • ガウス過程回帰 •
予測分布 • N個の⼊入⼒力力データに対し出⼒力力値を⽣生成する確率率率モデル • 異異常度度 p y x, D,σ 2 ( )= N y µy (x),σ 2 y (x)( ) µy (x) = kT K +σ 2 IN( ) −1 yN σ 2 f (x) =σ 2 + Ko − kT K +σ 2 IN( ) −1 k a(y', x') = −log p y' x', D,σ 2 ( ) = 1 2 log 2πσy 2 (x'){ }+ 1 2σy 2 (x') y'−µy (x'){ } 2 40
Download
![事前分布N(fN | 0,K)から抽出したf(x)の様⼦子
• 図8.2
• xは⼀一次元、N=50で[-5, 5]の範囲を区分してf(x)を抽出
fNは離離散値であるが、
事前分布により連続の関数値のように⾒見見える
10](https://image.slidesharecdn.com/random-160919114854/85/8-10-320.jpg)
![ステップ1:
p(fN | D)の計算
(4/4)
• Mの変形
M ≡
1
σ 2
IN + K−1#
$
%
&
'
(
−1
ウッドベリー⾏行行列列恒等式
A+ BDC[ ]
−1
= A−1
− A−1
B D−1
+CA−1
B!" #$
−1
CA−1
式(8.14)
M ≡
1
σ 2
IN
!
"
#
$
%
&
−1
−
1
σ 2
IN
!
"
#
$
%
&
−1
IN K + IN
1
σ 2
IN
!
"
#
$
%
&
−1
IN
!
"
##
$
%
&&IN
1
σ 2
IN
!
"
#
$
%
&
−1
=σ 2
IN −σ 2
K +σ 2
IN( )
−1
( ) 式(8.16)
式(8.17)M ≡σ 2
K K +σ 2
IN( )
−1
両辺に(K+σ2IN)をかける
16](https://image.slidesharecdn.com/random-160919114854/85/8-16-320.jpg)

![最適性の定義: 期待改善量量
• 評価値yは⼩小さければ⼩小さいほど良良いという仮定
• ymin:
Dに含まれるN個の評価値の中での最⼩小値(最善値)
• []+は正なら何もせず、負なら0に置き換え
J(x) = dyp(y | x, D,σ 2
)
−∞
∞
∫ ymin − y[ ]+
式(8.42)
33](https://image.slidesharecdn.com/random-160919114854/85/8-33-320.jpg)
![期待改善量量の計算
J(x) = dyN(y | µy (x),σy
2
(x))
−∞
ymin
∫ (ymin − y)
= duN(u | 0,1)(ymin −uσy (x)−µy (x))
−∞
ymin−µy
σy
∫
=σy (x) zΦ(z)+ N(z | 0,1)[ ]
z =
ymin −µy (x)
σy (x)
Φ(v) = du
−∞
u
∫ N(u | 0,1)
−
d
du
N(u | 0,1) = uN(u | 0,1)
J(x) = dyp(y | x, D,σ 2
)
−∞
∞
∫ ymin − y[ ]+
式(8.43)
式(8.44)
予測分布の式と より
34](https://image.slidesharecdn.com/random-160919114854/85/8-34-320.jpg)
![期待改善量量の解釈
• ここでzがある程度度⼤大きいとき[]内はzに⽐比例例
• σyはDにおける疎な領領域で⼤大きくなる(図8.3より)ため
期待改善量量を最⼤大にするxは、
「これまであまり試していない領領域でzが⼤大きくなる値」
J(x) =σy (x) zΦ(z)+ N(z | 0,1)[ ]
J(x) ≈ σy (x)× z(x)[ ]+
式(8.43)
式(8.45)
35](https://image.slidesharecdn.com/random-160919114854/85/8-35-320.jpg)



![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)