Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
matsuolab
6,745 views
PRML輪読#6
東京大学松尾研究室におけるPRML輪読資料です。
Education
◦
Read more
14
Save
Share
Embed
Embed presentation
Download
Downloaded 330 times
1
/ 27
2
/ 27
3
/ 27
4
/ 27
Most read
5
/ 27
Most read
6
/ 27
7
/ 27
8
/ 27
9
/ 27
10
/ 27
11
/ 27
12
/ 27
13
/ 27
14
/ 27
15
/ 27
16
/ 27
17
/ 27
18
/ 27
19
/ 27
20
/ 27
Most read
21
/ 27
22
/ 27
23
/ 27
24
/ 27
25
/ 27
26
/ 27
27
/ 27
More Related Content
PDF
PRML輪読#14
by
matsuolab
PDF
PRML輪読#2
by
matsuolab
PDF
PRML輪読#5
by
matsuolab
PDF
PRML輪読#9
by
matsuolab
PDF
PRML輪読#7
by
matsuolab
PDF
PRML輪読#4
by
matsuolab
PDF
PRML輪読#12
by
matsuolab
PDF
PRML輪読#3
by
matsuolab
PRML輪読#14
by
matsuolab
PRML輪読#2
by
matsuolab
PRML輪読#5
by
matsuolab
PRML輪読#9
by
matsuolab
PRML輪読#7
by
matsuolab
PRML輪読#4
by
matsuolab
PRML輪読#12
by
matsuolab
PRML輪読#3
by
matsuolab
What's hot
PPTX
PRML第6章「カーネル法」
by
Keisuke Sugawara
PDF
PRML 6.1章 カーネル法と双対表現
by
hagino 3000
PDF
PRML上巻勉強会 at 東京大学 資料 第1章後半
by
Ohsawa Goodfellow
PDF
PRML輪読#1
by
matsuolab
PDF
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PDF
PRML上巻勉強会 at 東京大学 資料 第1章前半
by
Ohsawa Goodfellow
PDF
PRML第3章@京大PRML輪講
by
Sotetsu KOYAMADA(小山田創哲)
PPTX
深層学習の数理
by
Taiji Suzuki
PDF
Prml4.4 ラプラス近似~ベイズロジスティック回帰
by
Yuki Matsubara
PDF
[DL輪読会]近年のエネルギーベースモデルの進展
by
Deep Learning JP
PDF
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
PDF
PRML11章
by
Takashi Tamura
PDF
「統計的学習理論」第1章
by
Kota Matsui
PDF
変分推論法(変分ベイズ法)(PRML第10章)
by
Takao Yamanaka
PPTX
PRML6.4
by
hiroki yamaoka
PPTX
ノンパラメトリックベイズを用いた逆強化学習
by
Shota Ishikawa
PDF
PRML 1.5-1.5.5 決定理論
by
Akihiro Nitta
PDF
パターン認識と機械学習6章(カーネル法)
by
Yukara Ikemiya
PDF
クラシックな機械学習入門:付録:よく使う線形代数の公式
by
Hiroshi Nakagawa
PDF
PRML 8.2 条件付き独立性
by
sleepy_yoshi
PRML第6章「カーネル法」
by
Keisuke Sugawara
PRML 6.1章 カーネル法と双対表現
by
hagino 3000
PRML上巻勉強会 at 東京大学 資料 第1章後半
by
Ohsawa Goodfellow
PRML輪読#1
by
matsuolab
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PRML上巻勉強会 at 東京大学 資料 第1章前半
by
Ohsawa Goodfellow
PRML第3章@京大PRML輪講
by
Sotetsu KOYAMADA(小山田創哲)
深層学習の数理
by
Taiji Suzuki
Prml4.4 ラプラス近似~ベイズロジスティック回帰
by
Yuki Matsubara
[DL輪読会]近年のエネルギーベースモデルの進展
by
Deep Learning JP
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
PRML11章
by
Takashi Tamura
「統計的学習理論」第1章
by
Kota Matsui
変分推論法(変分ベイズ法)(PRML第10章)
by
Takao Yamanaka
PRML6.4
by
hiroki yamaoka
ノンパラメトリックベイズを用いた逆強化学習
by
Shota Ishikawa
PRML 1.5-1.5.5 決定理論
by
Akihiro Nitta
パターン認識と機械学習6章(カーネル法)
by
Yukara Ikemiya
クラシックな機械学習入門:付録:よく使う線形代数の公式
by
Hiroshi Nakagawa
PRML 8.2 条件付き独立性
by
sleepy_yoshi
Similar to PRML輪読#6
PDF
Prml sec6
by
Keisuke OTAKI
PDF
Stanでガウス過程
by
Hiroshi Shimizu
PDF
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
PDF
ガウス過程回帰の導出 ( GPR : Gaussian Process Regression )
by
Kenji Urai
PDF
PRML_titech 2.3.1 - 2.3.7
by
Takafumi Sakakibara
PDF
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
PDF
20190721 gaussian process
by
Yoichi Tokita
PDF
PRML復々習レーン#9 6.3-6.3.1
by
sleepy_yoshi
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
PDF
Prml6
by
Arata Honda
PDF
Chapter6.4
by
Takuya Minagawa
PDF
[PRML] パターン認識と機械学習(第3章:線形回帰モデル)
by
Ryosuke Sasaki
PDF
PRML セミナー
by
sakaguchi050403
PDF
PRML 3.3.3-3.4 ベイズ線形回帰とモデル選択 / Baysian Linear Regression and Model Comparison)
by
Akihiro Nitta
PDF
PRML10-draft1002
by
Toshiyuki Shimono
PDF
PRML2.3.8~2.5 Slides in charge
by
Junpei Matsuda
PDF
PRML 6.4-6.5
by
正志 坪坂
PDF
[PRML] パターン認識と機械学習(第2章:確率分布)
by
Ryosuke Sasaki
PDF
PRML 10.4 - 10.6
by
Akira Miyazawa
PDF
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
Prml sec6
by
Keisuke OTAKI
Stanでガウス過程
by
Hiroshi Shimizu
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
ガウス過程回帰の導出 ( GPR : Gaussian Process Regression )
by
Kenji Urai
PRML_titech 2.3.1 - 2.3.7
by
Takafumi Sakakibara
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
20190721 gaussian process
by
Yoichi Tokita
PRML復々習レーン#9 6.3-6.3.1
by
sleepy_yoshi
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
Prml6
by
Arata Honda
Chapter6.4
by
Takuya Minagawa
[PRML] パターン認識と機械学習(第3章:線形回帰モデル)
by
Ryosuke Sasaki
PRML セミナー
by
sakaguchi050403
PRML 3.3.3-3.4 ベイズ線形回帰とモデル選択 / Baysian Linear Regression and Model Comparison)
by
Akihiro Nitta
PRML10-draft1002
by
Toshiyuki Shimono
PRML2.3.8~2.5 Slides in charge
by
Junpei Matsuda
PRML 6.4-6.5
by
正志 坪坂
[PRML] パターン認識と機械学習(第2章:確率分布)
by
Ryosuke Sasaki
PRML 10.4 - 10.6
by
Akira Miyazawa
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
PRML輪読#6
1.
PRML輪読会 2017 第6章 カーネル法 東京⼤学⼯学部システム創成学科 B4
⻄村弘平
2.
構成 6.1 双対表現 6.2 カーネル関数の構成 6.3
RBFネットワーク 6.4 ガウス過程 2
3.
概要 • 3章~5章では線形・⾮線形なパラメトリックなモデルによる予測 – 𝑦
𝑋, 𝑊 = 𝑊&Φ 𝑋 , • 訓練データは𝑤を学習したら捨てる. • 予測時にも訓練データ点の全部あるいは⼀部を利⽤するパターン認識法を考える. – ex. 最近傍法(2.5.2節参照) • 新しいテスト点は訓練データの中で最も近いサンプルと同じラベルが割り当てられる. – メモリベース法 • ⼊⼒空間における任意の2つのベクトルの類似度を測る指標が必要になる. • カーネル関数 – 𝑘 𝑋, 𝑋* = 𝜙 𝑋 & 𝜙(𝑋*) • 𝜙(𝑋): 特徴空間への⾮線形写像 • 元の次元から特徴空間次元に移して内積をとる関数 – 2つのベクトルの類似度を定めるようなもの • 特徴空間次元に移すメリット – 線形分離可能になる – パラメトリックな線形モデルはカーネル関数の線形和で表現可能 • 𝜙(𝑥)を直接扱わなくて良くなる. 3
4.
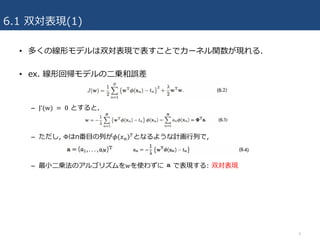
6.1 双対表現(1) • 多くの線形モデルは双対表現で表すことでカーネル関数が現れる. •
ex. 線形回帰モデルの⼆乗和誤差 – J‘(w) = 0 とすると, – ただし, Φはn番⽬の列が𝜙 𝑥4 &となるような計画⾏列で, – 最⼩⼆乗法のアルゴリズムを𝑤を使わずに で表現する: 双対表現 4
5.
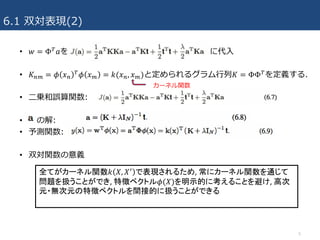
6.1 双対表現(2) • 𝑤
= Φ& 𝑎を に代⼊ • 𝐾47 = 𝜙 𝑥4 & 𝜙 𝑥7 = 𝑘(𝑥4, 𝑥7)と定められるグラム⾏列𝐾 = ΦΦ& を定義する. • ⼆乗和誤算関数: • の解: • 予測関数: • 双対関数の意義 5 カーネル関数 全てがカーネル関数𝑘 𝑋, 𝑋* で表現されるため, 常にカーネル関数を通じて 問題を扱うことができ, 特徴ベクトル𝜙(𝑋)を明示的に考えることを避け, 高次 元・無次元の特徴ベクトルを間接的に扱うことができる
6.
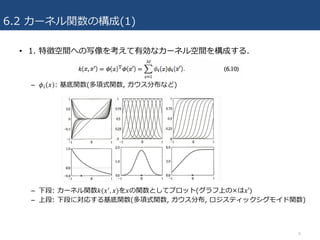
6.2 カーネル関数の構成(1) • 1.
特徴空間への写像を考えて有効なカーネル空間を構成する. – 𝜙8 𝑥 : 基底関数(多項式関数, ガウス分布など) – 下段: カーネル関数𝑘(𝑥*, 𝑥)を𝑥の関数としてプロット(グラフ上の×は𝑥′) – 上段: 下段に対応する基底関数(多項式関数, ガウス分布, ロジスティックシグモイド関数) 6
7.
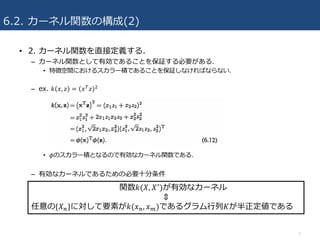
6.2. カーネル関数の構成(2) • 2.
カーネル関数を直接定義する. – カーネル関数として有効であることを保証する必要がある. • 特徴空間におけるスカラー積であることを保証しなければならない. – ex. 𝑘 𝑥, 𝑧 = 𝑥& 𝑧 ; • 𝜙のスカラー積となるので有効なカーネル関数である. – 有効なカーネルであるための必要⼗分条件 7 関数𝑘(𝑋, 𝑋* )が有効なカーネル ⇕ 任意の{𝑋4}に対して要素が𝑘(𝑥4, 𝑥7)であるグラム⾏列𝐾が半正定値である
8.
6.2 カーネル関数の構成(3) • ⾊々なカーネル関数 –
⼀般化された多項式カーネル – ガウスカーネル • 無限次元への写像と等価 – ⽣成モデルから構成されるカーネル • 2つの⼊⼒𝑋と𝑋′の確率がともに⼤きいときに2つの⼊⼒が似ているとされる. – シグモイドカーネル • グラム⾏列が必ずしも半正定値にならない. • サポートベクターマシンとニューラルネットワークが表層的に類似したものとなるため よく使われる. 8 𝑘 𝑋, 𝑋* = 𝑋& 𝑋* + 𝑐 A (𝑐 > 0) 𝑘 𝑋, 𝑋* = exp (− 𝑋 − 𝑋* ; / 2𝜎; ) 𝑘 𝑋, 𝑋* = 𝑝 𝑋 𝑝(𝑋* ) 𝑘 𝑋, 𝑋* = 𝑋& 𝑋* + 𝑐 A (𝑐 > 0)
9.
6.3 RBFネットワーク • 線形回帰モデル(3章) •
基底関数の選び⽅ – ⼀般的にRBF(動径基底関数) – RBFはその中⼼𝜇Lからの動径のみに依存している. • RBFを導⼊する動機 – 正確に⽬標変数の値を再現する関数補間 • ⽬的変数のノイズによって過学習する可能性あり – ⼊⼒変数にノイズが含まれる場合の補間 • Nadaraya-Watsonモデル 9
10.
6.3 RBFネットワーク(2) • ⼊⼒変数に確率分布𝑣(𝜉)に従う確率変数𝜉で表されるノイズが含まれるとき, ⼆乗和誤算関数は •
変分法により – ℎ(𝑥 − 𝑥4)は正規化されている. 10
11.
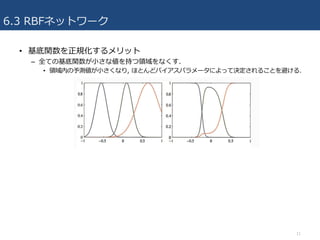
6.3 RBFネットワーク • 基底関数を正規化するメリット –
全ての基底関数が⼩さな値を持つ領域をなくす. • 領域内の予測値が⼩さくなり, ほとんどバイアスパラメータによって決定されることを避ける. 11
12.
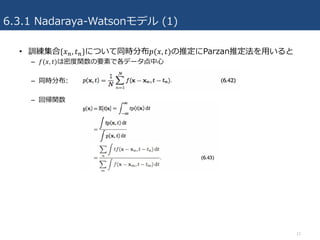
6.3.1 Nadaraya-Watsonモデル (1) •
訓練集合{𝑥4, 𝑡4}について同時分布𝑝(𝑥, 𝑡)の推定にParzan推定法を⽤いると – 𝑓(𝑥, 𝑡)は密度関数の要素で各データ点中⼼ – 同時分布: – 回帰関数 12
13.
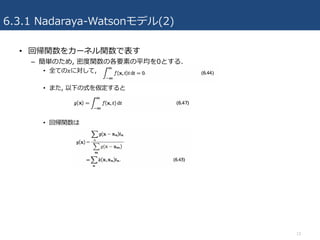
6.3.1 Nadaraya-Watsonモデル(2) • 回帰関数をカーネル関数で表す –
簡単のため, 密度関数の各要素の平均を0とする. • 全ての𝑥に対して, • また, 以下の式を仮定すると • 回帰関数は 13
14.
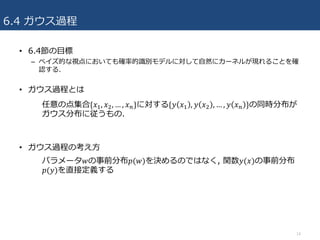
6.4 ガウス過程 • 6.4節の⽬標 –
ベイズ的な視点においても確率的識別モデルに対して⾃然にカーネルが現れることを確 認する. • ガウス過程とは • ガウス過程の考え⽅ 14 任意の点集合{𝑥R, 𝑥;, … , 𝑥4}に対する{𝑦 𝑥R , 𝑦 𝑥; , … , 𝑦 𝑥4 }の同時分布が ガウス分布に従うもの. パラメータ𝑤の事前分布𝑝(𝑤)を決めるのではなく, 関数𝑦(𝑥)の事前分布 𝑝(𝑦)を直接定義する
15.
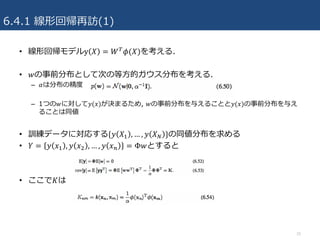
6.4.1 線形回帰再訪(1) • 線形回帰モデルy
𝑋 = 𝑊& 𝜙(𝑋)を考える. • 𝑤の事前分布として次の等⽅的ガウス分布を考える. – 𝛼は分布の精度 – 1つの𝑤に対して𝑦(𝑥)が決まるため, 𝑤の事前分布を与えることと𝑦(𝑥)の事前分布を与え ることは同値 • 訓練データに対応する{𝑦 𝑋R , … , 𝑦 𝑋V }の同値分布を求める • 𝑌 = 𝑦 𝑥R , 𝑦 𝑥; , … , 𝑦 𝑥4 = Φ𝑤とすると • ここで𝐾は 15
16.
6.4.1 線形回帰再訪(2) • 𝑤はガウス分布に従う変数集合 –
その線形結合である𝑦⾃⾝もガウス分布に従う. – 平均と分散を求めれば, 𝑦の分布も定まる. • ガウス過程の重要な点 – 同時分布が平均や共分散といった2次までの統計量で記述される. – 𝑦(𝑋)の平均は0とされることが多いのでガウス過程はカーネル関数として与えられる. 16
17.
6.4.2 ガウス過程による回帰(1) • ⽬標変数にノイズが含まれることを考慮 –
各観測値に対してノイズは独⽴に決定する. – ノイズはガウス分布に従う. – ⽬標値の同時分布は等⽅的なガウス分布に従う. – ガウス過程の定義より, • 周辺分布𝑝(𝑦)は平均が0で共分散がグラム⾏列𝐾であるガウス分布になるので – 周辺分布𝑝(𝑡)は, • 𝑝 𝑡 = ∫ 𝑝 𝑡 𝑦 𝑝 𝑦 𝑑𝑦 = 𝑁(𝑡|0, 𝐶) • ここで共分散⾏列𝐶は – 𝐶 𝑋4, 𝑋7 = 𝑘 𝑋4, 𝑋7 + 𝛽^R 𝛿47 17 誤差(ノイズ)⽬標値
18.
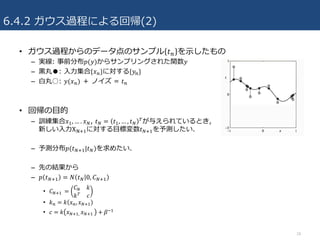
6.4.2 ガウス過程による回帰(2) • ガウス過程からのデータ点のサンプル
𝑡4 を⽰したもの – 実線: 事前分布𝑝(𝑦)からサンプリングされた関数𝑦 – ⿊丸●: ⼊⼒集合{𝑥4}に対する{𝑦4} – ⽩丸○: 𝑦(𝑥4) + ノイズ = 𝑡4 • 回帰の⽬的 – 訓練集合𝑥R, … . 𝑥V, 𝑡V = 𝑡R, … , 𝑡V &が与えられているとき, 新しい⼊⼒XbcRに対する⽬標変数𝑡VcRを予測したい. – 予測分布𝑝(𝑡VcR|𝑡V)を求めたい. – 先の結果から – 𝑝 𝑡VcR = 𝑁 𝑡V 0, 𝐶VcR • 𝐶VcR = 𝐶V 𝑘 𝑘& 𝑐 • 𝑘4 = 𝑘 𝑥4, 𝑥VcR • 𝑐 = 𝑘 𝑥VcR, 𝑥VcR + 𝛽^R 18
19.
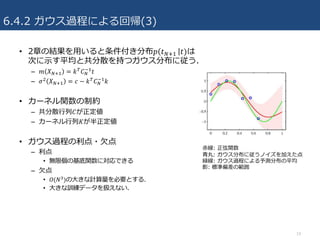
6.4.2 ガウス過程による回帰(3) • 2章の結果を⽤いると条件付き分布𝑝
𝑡VcR 𝑡)は 次に⽰す平均と共分散を持つガウス分布に従う. – 𝑚 𝑋VcR = 𝑘& 𝐶V ^R 𝑡 – 𝜎; 𝑋VcR = 𝑐 − 𝑘& 𝐶V ^R 𝑘 • カーネル関数の制約 – 共分散⾏列𝐶が正定値 – カーネル⾏列𝐾が半正定値 • ガウス過程の利点・⽋点 – 利点 • 無限個の基底関数に対応できる – ⽋点 • 𝑂(𝑁f)の⼤きな計算量を必要とする. • ⼤きな訓練データを扱えない. 19 ⾚線: 正弦関数 ⻘丸: ガウス分布に従うノイズを加えた点 緑線: ガウス過程による予測分布の平均 影: 標準偏差の範囲
20.
6.4.3 超パラメータの学習 • ガウス過程による予測は共分散関数の選択に依存 –
パラメトリックな関数族を考えて, そのパラメータ𝜃をデータから推定 • 超パラメータの学習⽅法 – 尤度関数𝑝(𝑡|𝜃)を評価する. – 簡単には, 対数尤度関数を最⼤化する𝜃の点推定を⾏う. • 共役勾配法などの効率的な最適化アルゴリズムが⽤いられる. 20
21.
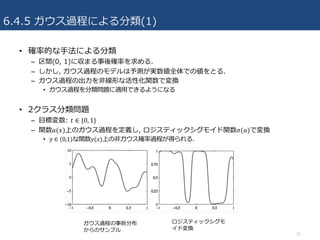
6.4.5 ガウス過程による分類(1) • 確率的な⼿法による分類 –
区間(0, 1)に収まる事後確率を求める. – しかし, ガウス過程のモデルは予測が実数値全体での値をとる. – ガウス過程の出⼒を⾮線形な活性化関数で変換 • ガウス過程を分類問題に適⽤できるようになる • 2クラス分類問題 – ⽬標変数: 𝑡 ∈ {0, 1} – 関数𝑎(𝑥)上のガウス過程を定義し, ロジスティックシグモイド関数𝜎(𝑎)で変換 • 𝑦 ∈ (0,1)な関数𝑦(𝑥)上の⾮ガウス確率過程が得られる. 21 ガウス過程の事前分布 からのサンプル ロジスティックシグモ イド変換
22.
6.4.5 ガウス過程による分類(2) • ⽬標変数𝑡の確率分布はベルヌーイ分布になる. –
𝑝 𝑡 𝑎 = 𝜎 𝑎 j 1 − 𝜎 𝑎 R^j • ガウス過程の分類の⽬標 – 予測分布𝑝 𝑡VcR 𝑡)の決定 22
23.
6.4.5 ガウス過程による分類(3) • 導出の流れ –
𝑎VcR = {𝑎 𝑋R , … , 𝑎 𝑋V }のガウス過程事前分布を考える. – 𝑡VcRに対する⾮ガウス事前分布が導かれる. – 𝑡Vが与えられた下での予測分布が与えられる. • 𝑎VcRに対するガウス過程事前分布は – 𝑝 𝑎VcR = 𝑁 𝑎VcR 0, 𝐶VcR ) – 回帰問題と異なり, 共分散⾏列にノイズが含まれない. • ⾏列の正定値性を保証するためノイズのような項を⼊れる. 23
24.
6.4.5 ガウス過程による分類(4) • 2クラス分類問題なので𝑝
𝑡VcR 𝑡V)を求めれば良い. – この積分を解析的に解くのは不可能 – サンプリング, またはガウス分布による近似 • ガウス分布による近似 – ラプラス近似を⽤いた⽅法(次節) – 変分推論法に基づく⽅法(10章) – EP法を⽤いる⽅法(10章) 24 𝜎(𝑎VcR)
25.
6.4.6 ラプラス近似 • 𝑝
𝑎VcR 𝑡V)のラプラス近似 • 以下の4章の近似式を⽤いて解ける 25
26.
ガウス過程のまとめ • ガウス過程のモデルは共分散がカーネル関数になる – ハイパーパラメーターが平均と分散になる. •
ガウス過程での回帰・分類問題 – 予測分布𝑝 𝑡VcR 𝑡V)を求める • ガウス過程の利点・⽋点 – 利点:無限個の基底関数に対応できる – ⽋点:𝑂(𝑁f)の⼤きな計算量を必要とする • 訓練データ数N – 基底関数の数Mがデータ数Nより⼤きい時に有効 26
27.
参照 • パターン認識と機械学習 下 –
C.M. ビショップ (著), 元⽥ 浩 (監訳), 栗⽥ 多喜夫 (監訳), 樋⼝ 知之 (監訳), 松本 裕治 (監訳), 村⽥ 昇 (監訳) • Pattern Recognition and Machine Learning – Kernel Methods , 池宮由楽 – https://www.slideshare.net/yukaraikemiya/6-15415589 • PRML勉強会 第6章 カーネル法 – 岩橋研究室 ⽊村⼤輝 – https://speakerdeck.com/muzun/prml-6zhang-kanerufa-at-chang-gang • ガウス過程の基礎と教師なし学習 – 統計数理研究所 持橋⼤地 – https://deepx-company.slack.com/archives/G46AJEKRC/p1490759266651275 27
Download



















![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)















![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)





![[PRML] パターン認識と機械学習(第3章:線形回帰モデル)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter3-171003081954-thumbnail.jpg?width=640&height=640&fit=bounds)





![[PRML] パターン認識と機械学習(第2章:確率分布)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter2-171002030018-thumbnail.jpg?width=640&height=640&fit=bounds)

