Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Toshiyuki Shimono
143 views
PRML10-draft1002
PRML10章の2回目のゼミの為の資料。 第10.3節まで。もうちょっと10.4節まで含めるかも。
Data & Analytics
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 13
2
/ 13
3
/ 13
4
/ 13
5
/ 13
6
/ 13
7
/ 13
8
/ 13
9
/ 13
10
/ 13
11
/ 13
12
/ 13
13
/ 13
More Related Content
PPTX
«Η Μαρίνα των βράχων» (Οδ. Ελύτης) - Μελκίδου Παναγιώτα, Νανάκου Ελένη, Παντε...
by
Lamprini Magaliou
DOCX
ΑΣΚΗΣΕΙΣ ΣΤΗ ΘΕΩΡΙΑ ΤΗΣ ΠΑΡΑΓΡΑΦΟΥ
by
Eleni Kots
PDF
4η ενότητα, Νεοελληνική Γλώσσα Γ΄ Γυμνασίου, Αναφορικές προτάσεις.
by
Τσατσούρης Χρήστος, Γυμνάσιο Μαγούλας Δυτικής Αττικής
PDF
εκπαιδευση
by
angitan
PDF
μαθημα 27 γεωγραφια β΄γυμνασιου
by
Μαυρουδης Μακης
DOCX
Φύλλο εργασίας-Ιστορία Γ Γυμν- Ενότητα 22
by
mvourtsian
PDF
Android NFCアプリハンズオン
by
Tomoki YAMASHITA
PPT
استراتيجية لعب الأدوار الجزء الثاني
by
Dr. AbdulRahman M. Gadah Al Madinah University, Educational Office of East Makkah
«Η Μαρίνα των βράχων» (Οδ. Ελύτης) - Μελκίδου Παναγιώτα, Νανάκου Ελένη, Παντε...
by
Lamprini Magaliou
ΑΣΚΗΣΕΙΣ ΣΤΗ ΘΕΩΡΙΑ ΤΗΣ ΠΑΡΑΓΡΑΦΟΥ
by
Eleni Kots
4η ενότητα, Νεοελληνική Γλώσσα Γ΄ Γυμνασίου, Αναφορικές προτάσεις.
by
Τσατσούρης Χρήστος, Γυμνάσιο Μαγούλας Δυτικής Αττικής
εκπαιδευση
by
angitan
μαθημα 27 γεωγραφια β΄γυμνασιου
by
Μαυρουδης Μακης
Φύλλο εργασίας-Ιστορία Γ Γυμν- Ενότητα 22
by
mvourtsian
Android NFCアプリハンズオン
by
Tomoki YAMASHITA
استراتيجية لعب الأدوار الجزء الثاني
by
Dr. AbdulRahman M. Gadah Al Madinah University, Educational Office of East Makkah
What's hot
PPT
Ο ΕΡΩΤΑΣ ΣΤΗ ΛΟΓΟΤΕΧΝΙΑ
by
PMANGR
PDF
Διαφήμιση Σχεδιάγραμμα
by
Maria Marselou
DOC
ΣΧΕΔΙΑΓΡΑΜΜΑ 12ης ΕΝΟΤΗΤΑΣ
by
arischatzis
DOCX
ειρηνη πολεμος κειμενο με ασκησεις. ειρηνη πολεμος κειμενο με ασκησεις.docxdocx
by
Simos Skouloudis
PPT
ΚΠΑ Γ' ΓΥΜΝΑΣΙΟΥ 13.2 ΒΑΣΙΚΟΙ ΘΕΣΜΟΙ Ε.Ε.
by
Νίκος Θεοτοκάτος
PPT
TO ΠΟΤΑΜΙ, Α. ΣΑΜΑΡΑΚΗ
by
dimitra sav
DOC
Εθελοντισμός
by
chavalesnick
PPTX
ΔΙΔΑΚΤΙΚΗ ΠΑΡΕΜΒΑΣΗ - Μετανάστευση Πολιτική Παιδεία Α' ΛΥΚΕΙΟΥ
by
Irini Panagiotaki
PPTX
Project Α΄ Λυκείου 2018-2019, Α2, Στερεότυπα
by
paez2012
PPTX
2.1 εννοια και χαρακτηριστικα κοινωνικων ομαδων
by
Ελενη Ζαχου
PDF
3 κοινωνικες ομαδες
by
LYKEIO/GYMNASIO
Ο ΕΡΩΤΑΣ ΣΤΗ ΛΟΓΟΤΕΧΝΙΑ
by
PMANGR
Διαφήμιση Σχεδιάγραμμα
by
Maria Marselou
ΣΧΕΔΙΑΓΡΑΜΜΑ 12ης ΕΝΟΤΗΤΑΣ
by
arischatzis
ειρηνη πολεμος κειμενο με ασκησεις. ειρηνη πολεμος κειμενο με ασκησεις.docxdocx
by
Simos Skouloudis
ΚΠΑ Γ' ΓΥΜΝΑΣΙΟΥ 13.2 ΒΑΣΙΚΟΙ ΘΕΣΜΟΙ Ε.Ε.
by
Νίκος Θεοτοκάτος
TO ΠΟΤΑΜΙ, Α. ΣΑΜΑΡΑΚΗ
by
dimitra sav
Εθελοντισμός
by
chavalesnick
ΔΙΔΑΚΤΙΚΗ ΠΑΡΕΜΒΑΣΗ - Μετανάστευση Πολιτική Παιδεία Α' ΛΥΚΕΙΟΥ
by
Irini Panagiotaki
Project Α΄ Λυκείου 2018-2019, Α2, Στερεότυπα
by
paez2012
2.1 εννοια και χαρακτηριστικα κοινωνικων ομαδων
by
Ελενη Ζαχου
3 κοινωνικες ομαδες
by
LYKEIO/GYMNASIO
Viewers also liked
PDF
PRML輪講用資料10章(パターン認識と機械学習,近似推論法)
by
Toshiyuki Shimono
PDF
PRML 10.3, 10.4 (Pattern Recognition and Machine Learning)
by
Toshiyuki Shimono
PPT
Minka
by
tequenews
PDF
Prml 10 1
by
正志 坪坂
PDF
8.4 グラフィカルモデルによる推論
by
sleepy_yoshi
PPTX
South Carolina Childhood Cancer Research Lab Presentation
by
Going Places, Inc
PDF
Data Visualization Japanの目指すもの
by
Yuichi Yazaki
PDF
混合モデルとEMアルゴリズム(PRML第9章)
by
Takao Yamanaka
PPTX
Agile Creativity - Creativity Day 2014 - Roma, Milano, Reggio Emilia
by
Giulio Roggero
PPTX
IT Management Expert in Social Media
by
Juho Nevalainen
PPTX
Startbucks delivering customer service
by
Agil V Joseph
PPTX
Ppt nutrisi
by
Zakiya Chumaida
PDF
Pautas para elegir un servicio de Telefonía e Internet
by
Juan Ramón Palomino de Frutos
PPTX
The Counter-Reformation
by
Tom Richey
PPTX
Why content curation is a new form of communication
by
Scoop.it
PPTX
SalesConf - Uncovering a Treasure Trove of Sales Opportunities using Customer...
by
Lincoln Murphy
PPTX
Starbucks delivering customer service
by
Monoj Kumar Rabha
PDF
Doug Ford - Says he will reduce LTT
by
Michelle Makos
PDF
How to Invest Well
by
Wealthfront
PPTX
Random Rants About Sales and Social Selling
by
Barbara Giamanco
PRML輪講用資料10章(パターン認識と機械学習,近似推論法)
by
Toshiyuki Shimono
PRML 10.3, 10.4 (Pattern Recognition and Machine Learning)
by
Toshiyuki Shimono
Minka
by
tequenews
Prml 10 1
by
正志 坪坂
8.4 グラフィカルモデルによる推論
by
sleepy_yoshi
South Carolina Childhood Cancer Research Lab Presentation
by
Going Places, Inc
Data Visualization Japanの目指すもの
by
Yuichi Yazaki
混合モデルとEMアルゴリズム(PRML第9章)
by
Takao Yamanaka
Agile Creativity - Creativity Day 2014 - Roma, Milano, Reggio Emilia
by
Giulio Roggero
IT Management Expert in Social Media
by
Juho Nevalainen
Startbucks delivering customer service
by
Agil V Joseph
Ppt nutrisi
by
Zakiya Chumaida
Pautas para elegir un servicio de Telefonía e Internet
by
Juan Ramón Palomino de Frutos
The Counter-Reformation
by
Tom Richey
Why content curation is a new form of communication
by
Scoop.it
SalesConf - Uncovering a Treasure Trove of Sales Opportunities using Customer...
by
Lincoln Murphy
Starbucks delivering customer service
by
Monoj Kumar Rabha
Doug Ford - Says he will reduce LTT
by
Michelle Makos
How to Invest Well
by
Wealthfront
Random Rants About Sales and Social Selling
by
Barbara Giamanco
Similar to PRML10-draft1002
PDF
Draftall
by
Toshiyuki Shimono
PDF
PRML chap.10 latter half
by
Narihira Takuya
PDF
PRML セミナー
by
sakaguchi050403
PDF
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
PDF
PRML_titech 2.3.1 - 2.3.7
by
Takafumi Sakakibara
PDF
PRML輪読#10
by
matsuolab
PDF
PRML10章
by
弘毅 露崎
PDF
PRML 10.4 - 10.6
by
Akira Miyazawa
PDF
PRML復々習レーン#9 6.3-6.3.1
by
sleepy_yoshi
PDF
[PRML] パターン認識と機械学習(第3章:線形回帰モデル)
by
Ryosuke Sasaki
PDF
東京都市大学 データ解析入門 7 回帰分析とモデル選択 2
by
hirokazutanaka
PPTX
PRMLrevenge_3.3
by
Naoya Nakamura
PDF
PRML復々習レーン#3 前回までのあらすじ
by
sleepy_yoshi
PDF
Bishop prml 10.2.2-10.2.5_wk77_100412-0059
by
Wataru Kishimoto
PDF
【Zansa】第12回勉強会 -PRMLからベイズの世界へ
by
Zansa
PDF
[PRML] パターン認識と機械学習(第1章:序論)
by
Ryosuke Sasaki
PDF
Prml3.5 エビデンス近似〜
by
Yuki Matsubara
PDF
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
PDF
Chap12 4 appendix_suhara
by
sleepy_yoshi
Draftall
by
Toshiyuki Shimono
PRML chap.10 latter half
by
Narihira Takuya
PRML セミナー
by
sakaguchi050403
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
PRML_titech 2.3.1 - 2.3.7
by
Takafumi Sakakibara
PRML輪読#10
by
matsuolab
PRML10章
by
弘毅 露崎
PRML 10.4 - 10.6
by
Akira Miyazawa
PRML復々習レーン#9 6.3-6.3.1
by
sleepy_yoshi
[PRML] パターン認識と機械学習(第3章:線形回帰モデル)
by
Ryosuke Sasaki
東京都市大学 データ解析入門 7 回帰分析とモデル選択 2
by
hirokazutanaka
PRMLrevenge_3.3
by
Naoya Nakamura
PRML復々習レーン#3 前回までのあらすじ
by
sleepy_yoshi
Bishop prml 10.2.2-10.2.5_wk77_100412-0059
by
Wataru Kishimoto
【Zansa】第12回勉強会 -PRMLからベイズの世界へ
by
Zansa
[PRML] パターン認識と機械学習(第1章:序論)
by
Ryosuke Sasaki
Prml3.5 エビデンス近似〜
by
Yuki Matsubara
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
by
Shunichi Sekiguchi
Chap12 4 appendix_suhara
by
sleepy_yoshi
More from Toshiyuki Shimono
PDF
大量の表形式データを 有効活用するための方法論 – 70個以上のソフトウェア作成からの知見–
by
Toshiyuki Shimono
PPTX
インターネット等からデータを自動収集するソフトウェアに必要な補助機能とその実装
by
Toshiyuki Shimono
PPTX
extracting only a necessary file from a zip file
by
Toshiyuki Shimono
PPTX
A Hacking Toolset for Big Tabular Files -- JAPAN.PM 2021
by
Toshiyuki Shimono
PDF
新型コロナの感染者数 全国の状況 2021年2月上旬まで
by
Toshiyuki Shimono
PDF
Sqlgen190412.pdf
by
Toshiyuki Shimono
PDF
BigQueryを使ってみた(2018年2月)
by
Toshiyuki Shimono
PPTX
既存分析ソフトへ データを投入する前に 簡便な分析するためのソフトの作り方の提案
by
Toshiyuki Shimono
PPTX
To Make Graphs Such as Scatter Plots Numerically Readable (PacificVis 2018, K...
by
Toshiyuki Shimono
PPTX
To Make Graphs Such as Scatter Plots Numerically Readable (PacificVis 2018, K...
by
Toshiyuki Shimono
PDF
Make Accumulated Data in Companies Eloquent by SQL Statement Constructors (PDF)
by
Toshiyuki Shimono
PPTX
企業等に蓄積されたデータを分析するための処理機能の提案
by
Toshiyuki Shimono
PPTX
新入社員の頃に教えて欲しかったようなことなど
by
Toshiyuki Shimono
PPTX
ページャ lessを使いこなす
by
Toshiyuki Shimono
PPTX
Guiを使わないテキストデータ処理
by
Toshiyuki Shimono
PPTX
データ全貌把握の方法170324
by
Toshiyuki Shimono
PPTX
Macで開発環境を整える170420
by
Toshiyuki Shimono
PPTX
大きなテキストデータを閲覧するには
by
Toshiyuki Shimono
PPTX
A Hacking Toolset for Big Tabular Files (3)
by
Toshiyuki Shimono
PPTX
Washingtondc b20161214 (2/3)
by
Toshiyuki Shimono
大量の表形式データを 有効活用するための方法論 – 70個以上のソフトウェア作成からの知見–
by
Toshiyuki Shimono
インターネット等からデータを自動収集するソフトウェアに必要な補助機能とその実装
by
Toshiyuki Shimono
extracting only a necessary file from a zip file
by
Toshiyuki Shimono
A Hacking Toolset for Big Tabular Files -- JAPAN.PM 2021
by
Toshiyuki Shimono
新型コロナの感染者数 全国の状況 2021年2月上旬まで
by
Toshiyuki Shimono
Sqlgen190412.pdf
by
Toshiyuki Shimono
BigQueryを使ってみた(2018年2月)
by
Toshiyuki Shimono
既存分析ソフトへ データを投入する前に 簡便な分析するためのソフトの作り方の提案
by
Toshiyuki Shimono
To Make Graphs Such as Scatter Plots Numerically Readable (PacificVis 2018, K...
by
Toshiyuki Shimono
To Make Graphs Such as Scatter Plots Numerically Readable (PacificVis 2018, K...
by
Toshiyuki Shimono
Make Accumulated Data in Companies Eloquent by SQL Statement Constructors (PDF)
by
Toshiyuki Shimono
企業等に蓄積されたデータを分析するための処理機能の提案
by
Toshiyuki Shimono
新入社員の頃に教えて欲しかったようなことなど
by
Toshiyuki Shimono
ページャ lessを使いこなす
by
Toshiyuki Shimono
Guiを使わないテキストデータ処理
by
Toshiyuki Shimono
データ全貌把握の方法170324
by
Toshiyuki Shimono
Macで開発環境を整える170420
by
Toshiyuki Shimono
大きなテキストデータを閲覧するには
by
Toshiyuki Shimono
A Hacking Toolset for Big Tabular Files (3)
by
Toshiyuki Shimono
Washingtondc b20161214 (2/3)
by
Toshiyuki Shimono
PRML10-draft1002
1.
記号の使い方に関して1 議論展開に用いる記号 記号仮名称詳細
⇐,⇔,⇒ 論理記号純粋に論理的関係/論理的帰結を表す。(従来の数学的用法を踏襲。) ⇒! 不可逆帰結⇒であるが、⇔ではないことを示す。 ·⇒ 通常帰結例外除去的な条件を課すと⇒と置換できるニュアンスを示す。 ⇒: 前提付加左側のような前提条件を取り決めた上で、右側の命題を主張する。● :⇐ 条件付加右側のような条件を追加的に取り決めた上で、左側の命題を主張する。● :⇔: 等価定義等価な条件式を並べて、どれかの条件式で取り決めをすることを示す。 未定義 代入可能時主張右辺の代入可能な全ての値について、左辺の条件が成り立つことを表す。 「· · ·」カギ括弧真偽の不明な命題、もしくは文字通りに解釈できない便宜上の数式を表す。 イコールに似た操作記号 記号仮名称詳細 = 通常等号少なくとも、純粋に論理的に両辺が等しい値を持つことを示す。 ニュアンス明確化の必要がある場合には、出来るだけこの他の記号に置換。 :=: 等式展開計算すれば等式関係が判明可能であることを表す。● := (遅延) 代入左辺の未定義の変数について、右辺の内容で定義する。(ただし遅延評価。) 左辺が単純な1 つの変数で無い場合には、未定義なのはどれであるか要注意。● ← 即時代入左辺に右辺を即時に代入する。:= よりも意味が明確化する。○ (数式群からのアルゴリズムの構成に有用な場合がある。) == 等式制約等しいという条件を新たに加える操作を表す。● :== 定義確認既に定義したことを確認する意図で使う記号。○ 未定義 定義可能主張定義可能であることを主張し、かつ、それを定義として用いる。 未定義 定義可能時定義定義可能な場合に限定して、それを定義として用いる。 + 近似記号近似関係 :+ 近似意図右辺を近似する意図で、左辺に何かの定義操作を加える。 データを扱うための記号(大体において数学の教科書に使われているような方法を踏襲する) 記号参照名詳細 R 実数全体 RD 直積D 次元のベクトル全体 ↔ 縦/横ベクトルそれぞれN 次元縦ベクトルとM 次元横ベクトル RN l / RM N ×M 行列行列の次元の順序縦N 次元で横M 次元の行列であること RN l ↔ N ×M 行列全体 M IM 単位行列対角要素は1、非対角要素は0 の縦横M 次元の正方行列 : RD → RM 定義域と値域写像 の定義域と値域を→で結んで表示している。 u · v 内積同じ長さのベクトル2 個の内積を意味している。 (xi)N i=1 数列数列を表す。 1前回のゼミとも異なるので注意。 1
2.
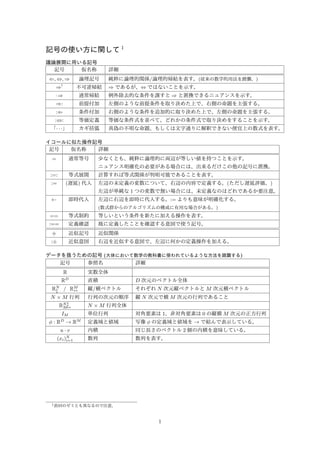
変数、特に確率変数に関する記号 X 確率変数
[x] 既知化(観測) ⇋ 未知化(由来参照) X⋆ 値 x P[x] 確率分布 P(x) 確率参照 表記仮名称詳細 X 大文字化変数x の「未知化」。分布を考慮することができるようになる。● x⋆ 意図達成数式/変数の意図(最適化/新たなデータの代入など) 達成を⋆ で示す。 x∀ 任意化変数の由来を残したまま、値を一般的に考慮する任意化の操作を表す。 [x] 一般化括弧変数x の「由来参照」/「未知化」/「任意化」のいずれかを示す。● X⋆ 観測未知変数に⋆ がついた場合は、特に「観測」を表すこととする。○ 引数x の値だけでなく引数がどの確率変数に由来するか関知して P(x) 確率参照確率参照記号P は異なる働きをするものとする。● (従来の統計学の用法を踏襲。) 補助的に、Q, p, q も用いる。 P[x] 分布参照未知化変数を引数に持つ確率参照は、分布を表す。P([x]) の略記。● • 無名変数数式表記簡潔化/変数(の由来と意図) の考慮阻止の目的で用いる。 ∝ 比例記号未知化変数/無名変数のみを動かしたときの比例、と意味を限定する。 const. 定数記号未知化変数/無名変数のみに対して定数関数、と意味を限定する。 P′ 普遍的総和不都合の無い限り、総和及び積分をこの記号で表示する。 E[確率変数| 条件k 分布の指定] またはE分布[確率変数| 条件] 相加平均を表す。 G[確率変数| 条件k 分布の指定] またはG分布[確率変数| 条件] 相乗平均を表す。● 上記の記号体系の作成意図に関して - 概念の本質の理解にかかわる冗漫さを最小化するため。 - 後日の参照の際に、作成した数式を含むノートを容易に理解できるようにするため。 - 誤読の回避/入力と推敲の容易性/読解の手間の低減により、上記の目的の達成を目指している。 - おそらく上記は、コルモゴロフによる確率論の公理論的展開で問題無く正当化が可能と考えられる。 2
3.
■ 用語集(索引に未記載のものなど) 変分ベイズ法「変分推論法」と同じ。
モデルエビデンスパラメータを周辺化した尤度 モデルエビデンス最大化パラメータを周辺化した尤度関数を最大にするパラメータを決定すること 非特異連続な分布を持つ確率変数が、丁度ある値を持つ確率が0 で無いこと(ポイントマスを持つ こと)。 積分消去観測対象となりうる値の予測分布を求めるために、パラメータの変数に対して積分をする ことで、そのパラメータを消去する操作。 解析的に加減乗除およびべき乗の操作で式が表示できることを表す。 閉形式積分の操作をした後の結果が「解析的」になった時g の結果について表す。 モデル平均p187 複数のモデルをパラメータで指定するようにして、そのパラメータ上の分布が求まっ たときに、それを使った平均値を使うことと考えられる。(?) ■ 参考になりそうな他の文献: 1. 情報幾何学の新展開甘利俊一サイエンス社(SGC-110) ごく最近(2014 年8 月25 日) に出版された本で、EM alg. 等の理論的な話、最良検定など(私 が個人的に気になる話)、産業連関表への言及などあまり見たことの無い話、甘利氏のさまざ まな個人的な研究にまつわる話が記載されており、興味深い。 2. 持橋さんのホームページ(所在未参照) この章は長くて複雑なので、この章を補完する重要情報がインターネット上のどこかにあると聞 いた。http://ibisforest.org/index.php?PRML によると、10 章を担当したのは持橋氏である。 ■ 理解が難しいところなど • § 10.1(p177) 「十分に柔軟な分布を使っても、過学習の問題は起きない」 → 理論的根拠はあるのか/経験則なのか? • § 10.1.2(p183) 図10.3「最もよく近似する一変数ガウス」→ 2 変数ガウスではないか? • § 10.1.4(p187) 隠れ変数Z がモデルm により「構造」が異なるということを反映した数学的 に自然な表記は何だろうか? 1
4.
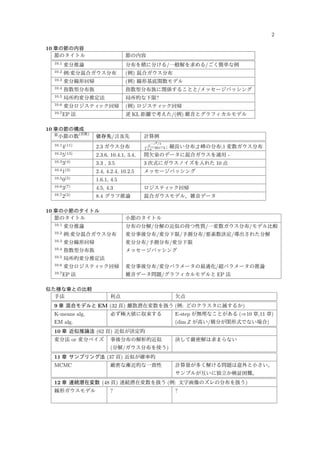
1 第10 章の全般的な内容と構成に関して
上下巻全般からの10 章についての言及のされかた 場所(ページ) 言及のされ方言及対象/解釈 1.2.3ベイズ確率(23) 最近1999 年以降? の非常に能率的な決定論的近似法変分ベイズ法/EP 法 1.2.4ガウス分布(28) 分散パラメータがベイズアプローチでも得られる§ 10.1.3 (§ 10.3.1?) 4.4ラプラス近似 (213)(215) 解析的な近似/局所的でない全体的アプローチ分解と変分近似 6.4.5ガウス過程 からの分類3 個考えられるガウス分布近似(1 個は§ 6.4.6) 変分推論法/EP 法 9混合モデル とEM (139) エレガントなベイズ的扱いKL 距離を使ったこと? 余分な計算がほとんど不要? データから自動的に要素数を決定§ 10.2 9.2.1混合ガウス 最尤推定(150) 特異性による最尤推定の深刻な過学習を回避EM alg. では未解決 EMアルゴリズムの一般化が変分推論法の枠組みlog px = Lpq + KLp(z|x) q 10.2変分線形回帰 (188) →「長く複雑なので· · · 後回しにして良い」§ 10.2 全体について 手法紹介の年代に関して(教科書に記載されたもの全部とは限らない) 変分推論(18 世紀、オイラーとラグランジュ)/汎関数微分(Feynmann et.al, 1964) 有限要素法(Kapur,1989)/最大エントロピー法(Schwarz,1988) 分布の分解の仮定(Jordan et al.,1999; Jaakkola, 2001)/平均場近似(Parisi, 1988) 条件q⋆( (zj) ) = G[ P(x,Z) ||Zj = zj ] による反復解の収束の保証(Boyd and Vandenberghe, 2004) ダイバージェンス(Ali and Silvey, 1966; Amari, 1985; Minka, 2005) 一変数ガウス分布を平均と分散で分解した近似の例(MacKay, 2003) ガウス分布のベイズ推論の完全な取り扱い(Minka 1998) 「変分混合ガウス分布」(ベイズ的でエレガント) (Attias, 1999b) 更新が最適化になっているのか徹底的なテスト(195)(Svens´en and Bishop, 2004) をパラメータと見なしてL を最大化し、点推定する(Corduneanu and Bishop, 2001) 変分ベイズ法の推論を行う汎用ソフトウェアの構成(207)(Bishop et al., 2003) 更新式は局所的なメッセージパッシングアルゴリズム(Winn and Bishop, 2005) 凸双対性の枠組み(Rockafellar, 1972; Jordan et al., 1999) ガウス分布の関数形式でシグモイド関数の下限を作る(Jaakkola and Jordan, 2000) EP 法(期待値伝搬法) (Minka, 2001a, Minka, 2001b) /雑音データ問題(Minka, 2001b) 仮定密度フィルタリング(ADF)/モーメント一致法 (Maybeck, 1982; Lauritzen, 1992; Boyen and Koller, 1998; Opper and Winther,1999) ロジスティックの形のモデルの場合は、EP 法が局所的変分法/ラプラス近似より勝ることが多い (Kuss and Rasmussen, 2006) 再重み付け木メッセージパッシング(Wainwright et al., 2005) 部分的確率伝搬(Wiegerinck and Heskes, 2003) Power EP 法(Minka, 2004)
5.
2 10 章の節の内容
節のタイトル節の内容 10.1 変分推論分布を積に分ける/一般解を求める/ごく簡単な例 10.2 例:変分混合ガウス分布(例) 混合ガウス分布 10.3 変分線形回帰(例) 線形基底関数モデル 10.4 指数型分布族指数型分布族に関係することと/メッセージパッシング 10.5 局所的変分推定法局所的な下限? 10.6 変分ロジスティック回帰(例) ロジスティック回帰 10.7EP 法逆KL 距離で考えた/(例) 雑音とグラフィカルモデル 10 章の節の構成 節小節の数(頁数) 依存先/言及先計算例 10.14(11) 2.3 ガウス分布e−z2/2 1+e−20z−4 ; 細長い分布,2 峰の分布;1 変数ガウス分布 10.25(13) 2.3.6, 10.4.1, 3.4, 間欠泉のデータに混合ガウスを適用- 10.33(4) 3.3 , 3.5 3 次式にガウスノイズを入れた10 点 10.41(3) 2.4, 4.2.4, 10.2.5 メッセージパッシング 10.50(5) 1.6.1, 4.5 10.63(7) 4.5, 4.3 ロジスティック回帰 10.72(2) 8.4 グラフ推論混合ガウスモデル、雑音データ 10 章の小節のタイトル 節のタイトル小節のタイトル 10.1 変分推論分布の分解/分解の近似の持つ性質/一変数ガウス分布/モデル比較 10.2 例:変分混合ガウス分布変分事後分布/変分下限/予測分布/要素数決定/導出された分解 10.3 変分線形回帰変分分布/予測分布/変分下限 10.4 指数型分布族メッセージパッシング 10.5 局所的変分推定法 10.6 変分ロジスティック回帰変分事後分布/変分パラメータの最適化/超パラメータの推論 10.7EP 法雑音データ問題/グラフィカルモデルとEP 法 似た様な章との比較 手法利点欠点 9 章混合モデルとEM (32 頁) 離散潜在変数を扱う(例: どのクラスタに属するか) K-means alg. 必ず極大値に収束するE-step が無理なことがある()10 章,11 章) EM alg. (dim Z が高い/積分が閉形式でない場合) 10 章近似推論法(62 頁) 近似が決定的 変分法or 変分ベイズ事後分布の解析的近似決して厳密解は求まらない (分解/ガウス分布を使う) 11 章サンプリング法(37 頁) 近似が確率的 MCMC 厳密な漸近的な一致性計算量が多く解ける問題は意外と小さい。 サンプルが互いに独立か検証困難。 12 章連続潜在変数(48 頁) 連続潜在変数を扱う(例: 文字画像のズレの分布を扱う) 線形ガウスモデル? ?
6.
第10.1.2 節分解による近似のもつ性質下巻180 頁
この小節では3 例に、直前の小節で示した方法の“分解” を適用し、その結果を観察する。 1. 2 次元ガウス分布をq( (z1, z2) ) := q1(z1) q2(z2) (z1, z2 2 R) で“変分近似” する。 2. 比較のため、別の方法を適用する。KL 距離KL( q || P ) の極小化をする代わりに、引数を逆転 させたKL( P || q ) を極小化する。 3. 2 峰性の分布に対して適用し、局所解が複数存在することを調べる。 また、 ダイバージェンスを紹介する。(KL 距離、Hellinger 距離の一般化になっている。) P の分布(↓) KL(q||P) を極小化した場合KL(P||q) を極小化した場合 斜めに細長い分布 分布を小さく 近似する傾向がある 周辺分布が一致する (少なくとも1 or 2 次元ガウスの場合) 2 峰性の分布 局所解が複数存在する「予測性能の悪化をもたらす」 P(z) がきわめて0 に近い場所でq(z) の値が大きいと” 損失” が大きいので q の“分布域” は小さくまとまる。 q(z) がきわめて0 に近い場所でP(z) の値が大きいと” 損失” が大きいので q はP の“分布域” を覆うように広がる。 • 考えると面白そうなこと: – 分布のP とq が上記のようなケースだけではなくて、fat-tail な場合や特異の場合も考察して、何が起こるか 考える。 1
7.
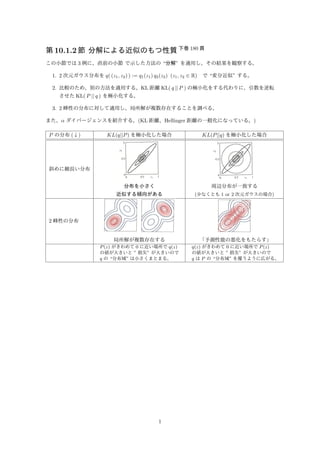
第10.1.3 節例: 一変数ガウス分布下巻184
頁 ガウス分布からN 個の点を観測した状況を考えている。 尤度関数P(D = x|μ, ) = τ 2π N/2 exp n −τ 2 PN n=1(xn − μ)2 o (10.21) 事前分布: p[μ|] N(μ|μ0, (0)−1), p[] Gam(|a0, b0) を採用すると共役分布になる§ 2.3.6 ガウス-ガンマ分布 演習2.44 。 “分解” としてはq[μ, ] = q[μ] × q[] (10.24) とすることで、q[μ] はガウス分布、q[] はガンマ分布となる。 (1) 初期値(2) μ で最適化 (3) で最適化(4) 収束解 分解q[μ]q[] := q[μ, ] (10.24) 共役事前分布p([μ]|) N(μ0, 1 λ0 ) (10.22) 〃p([]) Gamma(a0, b0) (10.23) 0μ0 + Nx ¯最適解q⋆[μ] :=: N(μN, N) := N 0 + N , (0 + N)Eq⋆[τ]() (10.25 − 27) 〃q⋆[] :=: Gam(aN, bN) := Gam(a0 + N + 1 2 , b0 + 1 2 Eq⋆[μ] XN (xn − μ)2 + 0(μ − μ0) n=1 # (10.28 − 30) (a0, b0, μ0, 0) (0, 0, 0, 0) =) Eq⋆[μ][μ] = ¯x, Eq⋆[μ][μ2] = ¯x2 + 1 NEq⋆[τ][] (10.32) PN Eq⋆[τ][] = (x¯2 − ¯x2)−1 = ( n=1(xn − ¯x)2/N)−1 (10.33) , 補足: 最尤推定と比較した優位性についての議論を含む、ガウス分布のベイズ推論の完全な扱いは、 Minka 1998(“Inferring a Gaussian distribution”. Media Lab note, MIT) を参照。 http://research.microsoft.com/˜minka 2
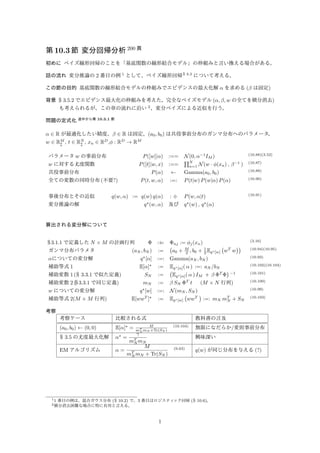
8.
第3 章線形回帰モデル上巻135 頁
この第3 章のメモについての作成意図: 第10.3 節でよく参照されるため。 第10.3 節で必要と考えられる仮定と定義について(主に第3 章) 太字は主に節のタイトル下線でよく使う用語の定義●はx, t, ,,
9.
, の定義○は§
10.3.1 から参照 節(小節数)頁数節のタイトル10 章で必要と考えられる仮定/定義事項 1.2.4 4 ガウス分布精度とは分散の逆数であり1/2 に等しい。 2.3.6 5 ガウス分布に対するベイズ推論精度パラメータに対する共役事前分布はガンマ分布。 3. 42 線形回帰モデル● N 個の観測値(xn 2 RD) と「目標値」(tn 2 R) 3.1 (5) 10 線形基底関数モデル線形モデル= 線形基底関数モデル∋ 線形回帰モデル ○● (j=0,...,1) : 基底関数(ただしx) := 1 とするj M−) P 0(線形モデルy(x,w) := j=0..M−1 wjj (x) :=: w · (x) 3.1.1 2 最尤推定と最小二乗法●計画行列 :( nj := j(xn) (3.16) ●
10.
: 観測値へのノイズの分散の逆数P(t|x,w,
11.
) = N(t|y(x,w),
12.
−1) 3.2 5
バイアス-バリアンス分解 3.3 (3) 9 ベイズ線形回帰 3.3.1 4 パラメータの分布● : パラメータw の各要素の精度p(w|) = N(w|0, −1IM) ○ 事前分布P([w]) := N(0, −1), 観測ノイズP([t]|x,w,
13.
) := N(w
· (x),
Download

![変数、特に確率変数に関する記号
X
確率変数
[x]
既知化(観測)
⇋
未知化(由来参照)
X⋆
値
x
P[x]
確率分布
P(x)
確率参照
表記仮名称詳細
X 大文字化変数x の「未知化」。分布を考慮することができるようになる。●
x⋆ 意図達成数式/変数の意図(最適化/新たなデータの代入など) 達成を⋆ で示す。
x∀ 任意化変数の由来を残したまま、値を一般的に考慮する任意化の操作を表す。
[x] 一般化括弧変数x の「由来参照」/「未知化」/「任意化」のいずれかを示す。●
X⋆ 観測未知変数に⋆ がついた場合は、特に「観測」を表すこととする。○
引数x の値だけでなく引数がどの確率変数に由来するか関知して
P(x) 確率参照確率参照記号P は異なる働きをするものとする。●
(従来の統計学の用法を踏襲。) 補助的に、Q, p, q も用いる。
P[x] 分布参照未知化変数を引数に持つ確率参照は、分布を表す。P([x]) の略記。●
• 無名変数数式表記簡潔化/変数(の由来と意図) の考慮阻止の目的で用いる。
∝ 比例記号未知化変数/無名変数のみを動かしたときの比例、と意味を限定する。
const. 定数記号未知化変数/無名変数のみに対して定数関数、と意味を限定する。
P′ 普遍的総和不都合の無い限り、総和及び積分をこの記号で表示する。
E[確率変数| 条件k 分布の指定] またはE分布[確率変数| 条件] 相加平均を表す。
G[確率変数| 条件k 分布の指定] またはG分布[確率変数| 条件] 相乗平均を表す。●
上記の記号体系の作成意図に関して
- 概念の本質の理解にかかわる冗漫さを最小化するため。
- 後日の参照の際に、作成した数式を含むノートを容易に理解できるようにするため。
- 誤読の回避/入力と推敲の容易性/読解の手間の低減により、上記の目的の達成を目指している。
- おそらく上記は、コルモゴロフによる確率論の公理論的展開で問題無く正当化が可能と考えられる。
2](https://image.slidesharecdn.com/draft1002-141002090614-phpapp02/85/PRML10-draft1002-2-320.jpg)

![1
第10 章の全般的な内容と構成に関して
上下巻全般からの10 章についての言及のされかた
場所(ページ) 言及のされ方言及対象/解釈
1.2.3ベイズ確率(23) 最近1999 年以降? の非常に能率的な決定論的近似法変分ベイズ法/EP 法
1.2.4ガウス分布(28) 分散パラメータがベイズアプローチでも得られる§ 10.1.3 (§ 10.3.1?)
4.4ラプラス近似
(213)(215) 解析的な近似/局所的でない全体的アプローチ分解と変分近似
6.4.5ガウス過程
からの分類3 個考えられるガウス分布近似(1 個は§ 6.4.6) 変分推論法/EP 法
9混合モデル
とEM (139) エレガントなベイズ的扱いKL 距離を使ったこと?
余分な計算がほとんど不要?
データから自動的に要素数を決定§ 10.2
9.2.1混合ガウス
最尤推定(150) 特異性による最尤推定の深刻な過学習を回避EM alg. では未解決
EMアルゴリズムの一般化が変分推論法の枠組みlog px = Lpq
+ KLp(z|x)
q
10.2変分線形回帰
(188) →「長く複雑なので· · · 後回しにして良い」§ 10.2 全体について
手法紹介の年代に関して(教科書に記載されたもの全部とは限らない)
変分推論(18 世紀、オイラーとラグランジュ)/汎関数微分(Feynmann et.al, 1964)
有限要素法(Kapur,1989)/最大エントロピー法(Schwarz,1988)
分布の分解の仮定(Jordan et al.,1999; Jaakkola, 2001)/平均場近似(Parisi, 1988)
条件q⋆( (zj) ) = G[ P(x,Z) ||Zj = zj ] による反復解の収束の保証(Boyd and Vandenberghe, 2004)
ダイバージェンス(Ali and Silvey, 1966; Amari, 1985; Minka, 2005)
一変数ガウス分布を平均と分散で分解した近似の例(MacKay, 2003)
ガウス分布のベイズ推論の完全な取り扱い(Minka 1998)
「変分混合ガウス分布」(ベイズ的でエレガント) (Attias, 1999b)
更新が最適化になっているのか徹底的なテスト(195)(Svens´en and Bishop, 2004)
をパラメータと見なしてL を最大化し、点推定する(Corduneanu and Bishop, 2001)
変分ベイズ法の推論を行う汎用ソフトウェアの構成(207)(Bishop et al., 2003)
更新式は局所的なメッセージパッシングアルゴリズム(Winn and Bishop, 2005)
凸双対性の枠組み(Rockafellar, 1972; Jordan et al., 1999)
ガウス分布の関数形式でシグモイド関数の下限を作る(Jaakkola and Jordan, 2000)
EP 法(期待値伝搬法) (Minka, 2001a, Minka, 2001b) /雑音データ問題(Minka, 2001b)
仮定密度フィルタリング(ADF)/モーメント一致法
(Maybeck, 1982; Lauritzen, 1992; Boyen and Koller, 1998; Opper and Winther,1999)
ロジスティックの形のモデルの場合は、EP 法が局所的変分法/ラプラス近似より勝ることが多い
(Kuss and Rasmussen, 2006)
再重み付け木メッセージパッシング(Wainwright et al., 2005)
部分的確率伝搬(Wiegerinck and Heskes, 2003)
Power EP 法(Minka, 2004)](https://image.slidesharecdn.com/draft1002-141002090614-phpapp02/85/PRML10-draft1002-4-320.jpg)
![第10.1.3 節例: 一変数ガウス分布下巻184 頁
ガウス分布からN 個の点を観測した状況を考えている。
尤度関数P(D = x|μ, ) =
τ
2π
N/2
exp
n
−τ
2
PN
n=1(xn − μ)2
o
(10.21)
事前分布: p[μ|] N(μ|μ0, (0)−1), p[] Gam(|a0, b0) を採用すると共役分布になる§ 2.3.6 ガウス-ガンマ分布
演習2.44 。
“分解” としてはq[μ, ] = q[μ] × q[] (10.24) とすることで、q[μ] はガウス分布、q[] はガンマ分布となる。
(1) 初期値(2) μ で最適化
(3) で最適化(4) 収束解
分解q[μ]q[] := q[μ, ] (10.24)
共役事前分布p([μ]|) N(μ0, 1
λ0
) (10.22)
〃p([]) Gamma(a0, b0)
(10.23)
0μ0 + Nx
¯最適解q⋆[μ] :=: N(μN, N) := N
0 + N
, (0 + N)Eq⋆[τ]()
(10.25 − 27)
〃q⋆[] :=: Gam(aN, bN) := Gam(a0 +
N + 1
2
, b0 +
1
2
Eq⋆[μ]
XN
(xn − μ)2 + 0(μ − μ0)
n=1
#
(10.28 − 30)
(a0, b0, μ0, 0) (0, 0, 0, 0) =) Eq⋆[μ][μ] = ¯x, Eq⋆[μ][μ2] = ¯x2 +
1
NEq⋆[τ][]
(10.32)
PN
Eq⋆[τ][] = (x¯2 − ¯x2)−1 = (
n=1(xn − ¯x)2/N)−1 (10.33)
,
補足: 最尤推定と比較した優位性についての議論を含む、ガウス分布のベイズ推論の完全な扱いは、
Minka 1998(“Inferring a Gaussian distribution”. Media Lab note, MIT) を参照。
http://research.microsoft.com/˜minka
2](https://image.slidesharecdn.com/draft1002-141002090614-phpapp02/85/PRML10-draft1002-7-320.jpg)


![−1)
3.2 5 バイアス-バリアンス分解
3.3 (3) 9 ベイズ線形回帰
3.3.1 4 パラメータの分布● : パラメータw の各要素の精度p(w|) = N(w|0, −1IM)
○ 事前分布P([w]) := N(0, −1), 観測ノイズP([t]|x,w,](https://image.slidesharecdn.com/draft1002-141002090614-phpapp02/85/PRML10-draft1002-12-320.jpg)

















































![[PRML] パターン認識と機械学習(第3章:線形回帰モデル)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter3-171003081954-thumbnail.jpg?width=640&height=640&fit=bounds)





![[PRML] パターン認識と機械学習(第1章:序論)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter1-170903070406-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)





















