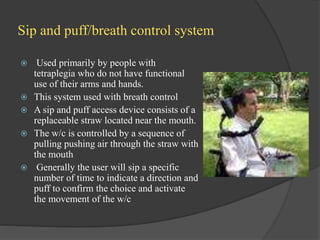
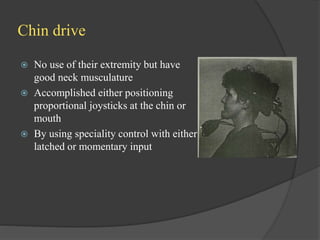
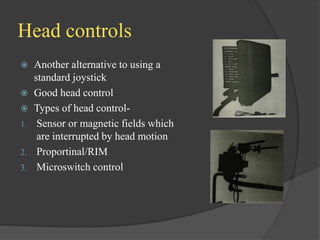
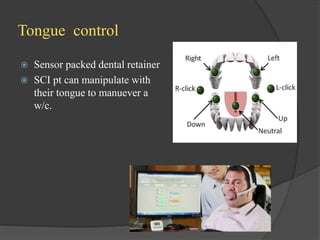
The document outlines advancements in powered wheelchair technology, beginning with early models that utilized automobile components for limited mobility and evolving through the incorporation of microprocessors for improved control and stability. It describes various seating systems, control mechanisms, and input methods, including options for users with varying physical abilities, such as joystick and sip-puff systems. The text also highlights innovative features like power stand up, stair climbing capabilities, and hybrid power sources that enhance accessibility and user experience.