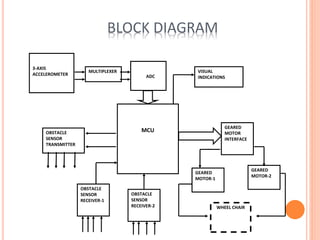
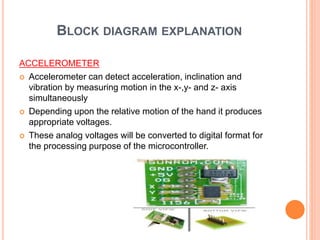
The document describes a hand gesture controlled wheelchair. An accelerometer is used to sense hand movements and control the wheelchair's movement forward, backward, left, and right. An obstacle sensor uses IR transmission and reflection to detect objects behind the wheelchair. The system allows disabled and elderly users to control a wheelchair through simple hand gestures for increased mobility and independence.









































![iotoperatedwheelchair8thsem-170425052323_(1)[1] - Copy.pptx - AutoRecovered...](https://cdn.slidesharecdn.com/ss_thumbnails/iotoperatedwheelchair8thsem-17042505232311-copy-251101122002-e1587880-thumbnail.jpg?width=640&height=640&fit=bounds)
![iotoperatedwheelchair8thsem-170425052323_(1)[1] - Copy.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/iotoperatedwheelchair8thsem-17042505232311-copy-251101122238-dd3b998f-thumbnail.jpg?width=640&height=640&fit=bounds)



























