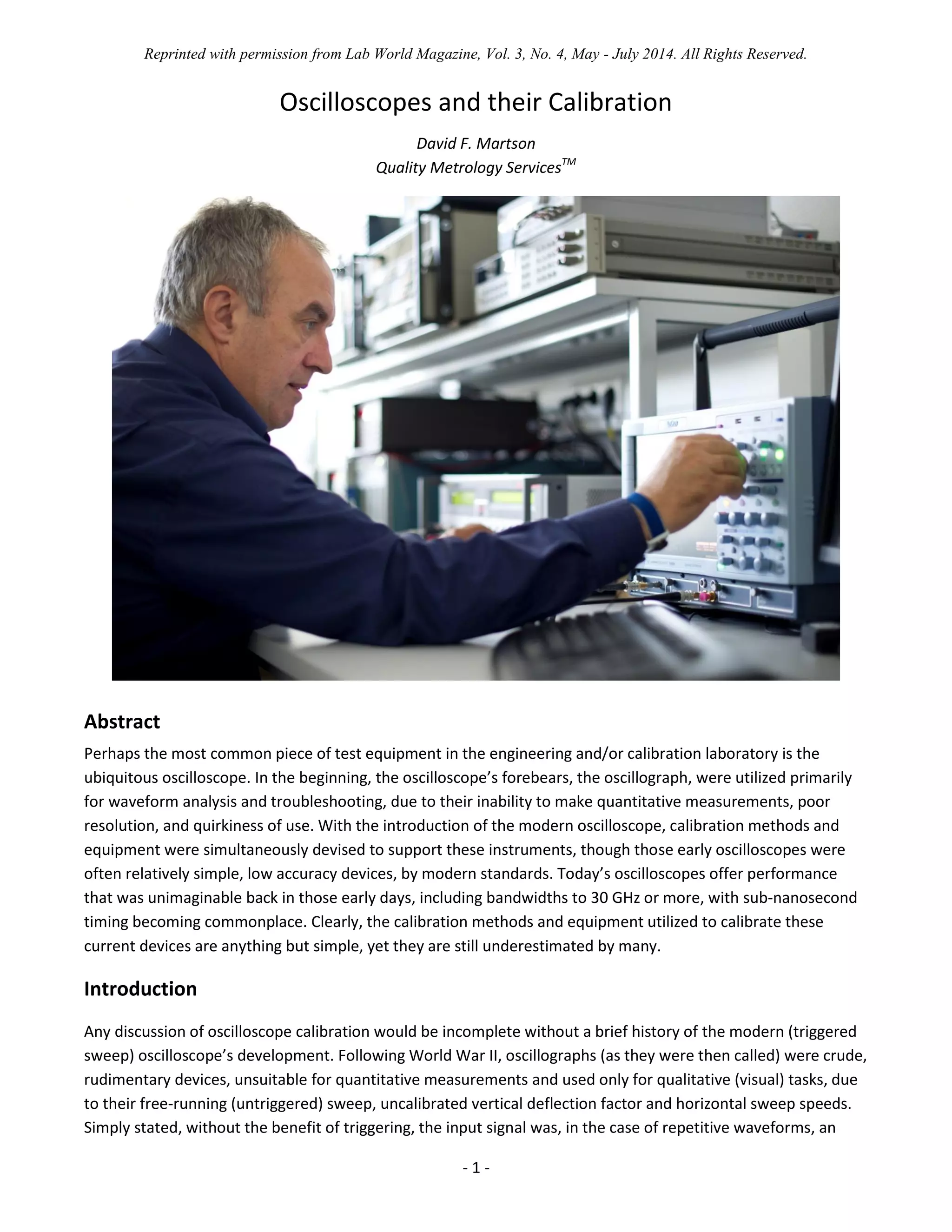
The document provides an overview of oscilloscope calibration, including a brief history of oscilloscope development and the introduction of dedicated calibration equipment. It describes the primary instruments used to calibrate the vertical, triggering, and horizontal subsystems of oscilloscopes. For the vertical subsystem, these include a standard amplitude calibrator, fast-rise pulse generator, high amplitude square wave generator, and constant amplitude signal generator. A constant amplitude signal generator is also used for triggering calibration. Horizontal sweep speeds are calibrated using a time-mark generator.