Download as PDF, PPTX

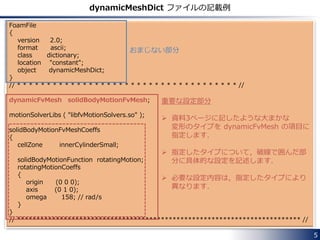
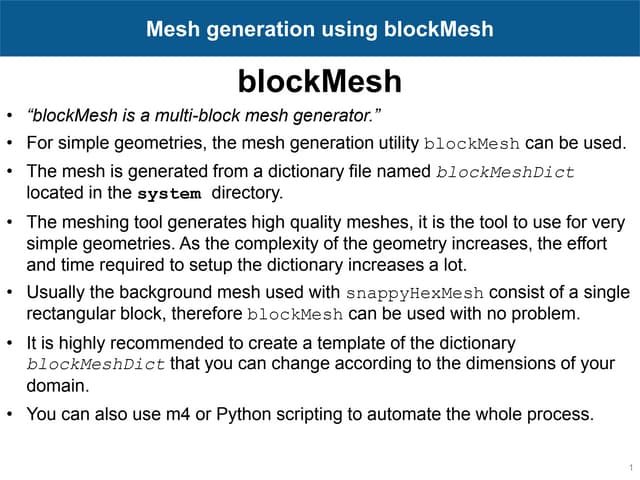
![Available types of solid motions
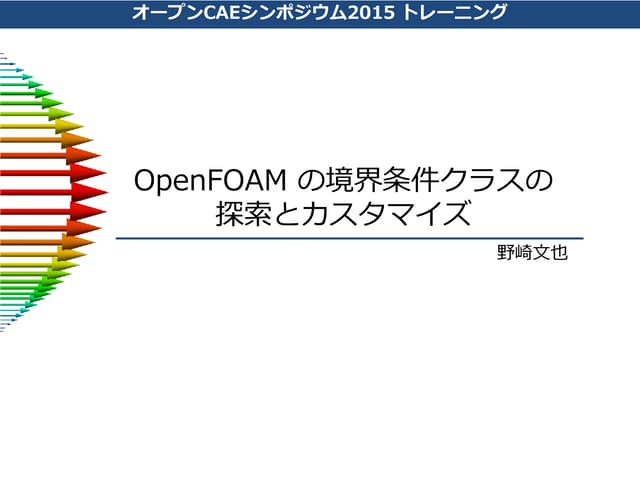
Translational motions
• linearMotion : Uniform linear motion with constant velocity
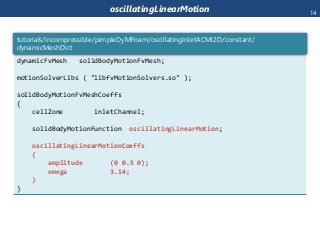
• oscillatingLinearMotion : Oscillating linear motion
Rotational motions
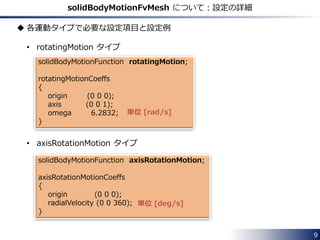
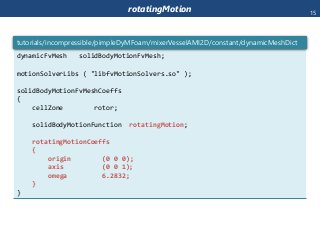
• rotatingMotion : Uniform circular motion
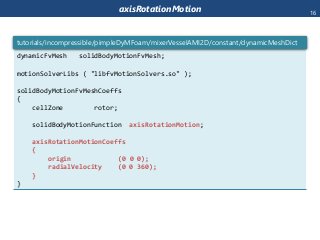
• axisRotationMotion : Uniform circular motion
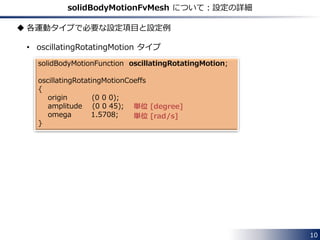
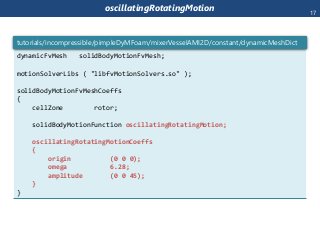
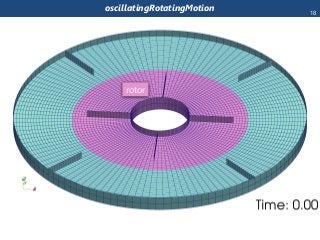
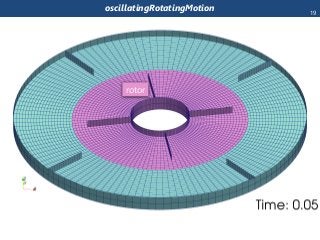
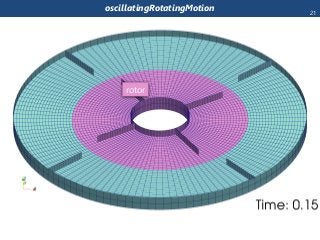
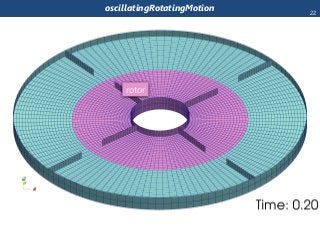
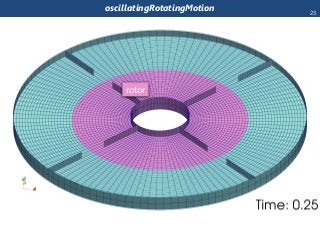
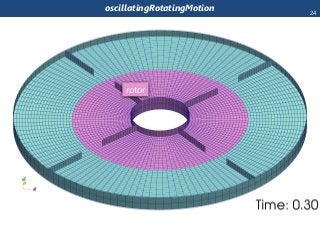
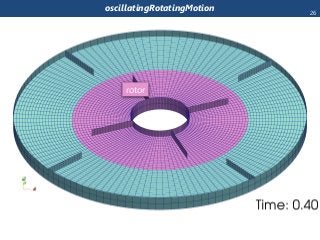
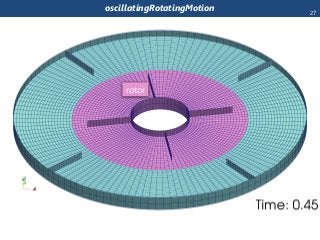
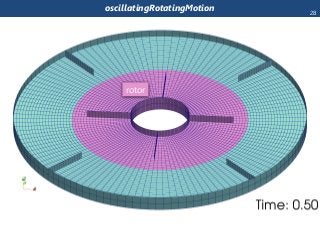
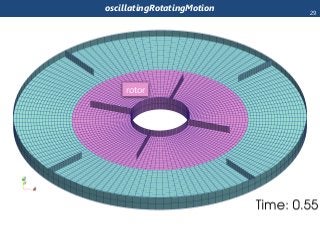
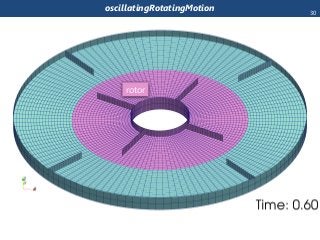
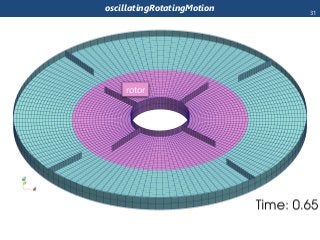
• oscillatingRotatingMotion : Oscillating rotation motion
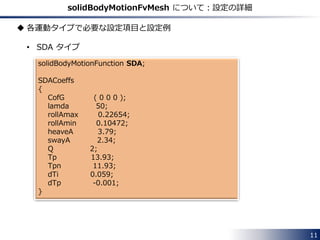
Ship Design Analysis [1]
• SDA
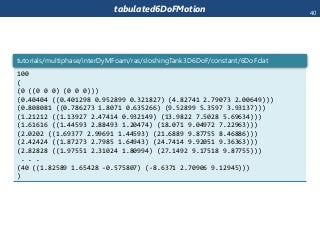
Tabulated data
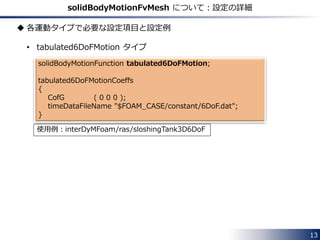
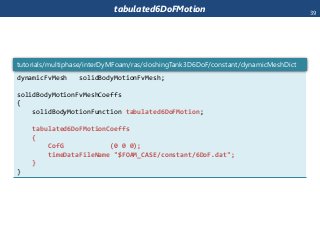
• tabulated6DoFMotion
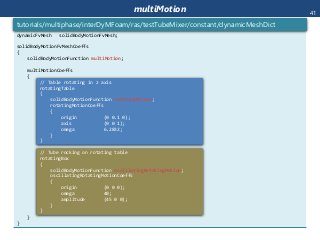
Combination of above types
• multiMotion
12](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-12-320.jpg)



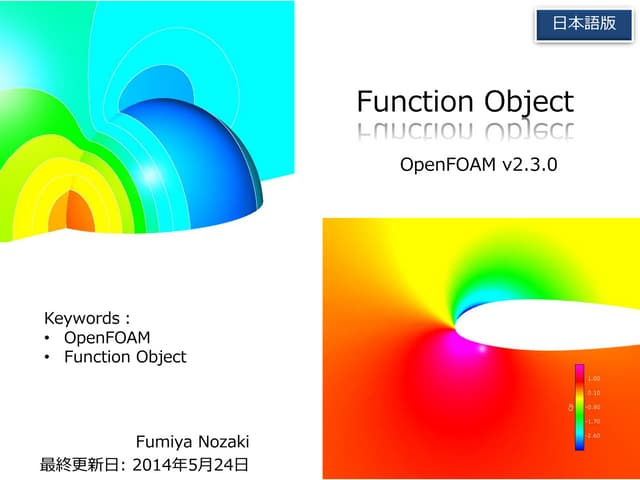
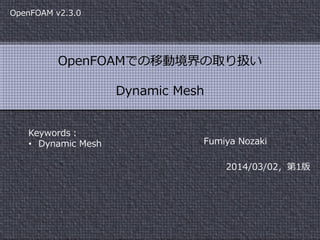
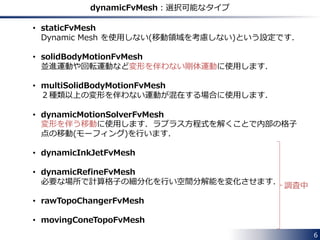
![Brief description of dynamicMotionSolverFvMesh
Solve a Laplace’s equation for the motion displacement 𝑑 𝑚 [𝑚] or motion
velocity 𝑢 𝑚 [ 𝑚 𝑠]:
𝛻 ∙ 𝛾𝛻𝑑 𝑚 = 0
or
𝛻 ∙ 𝛾𝛻𝑢 𝑚 = 0
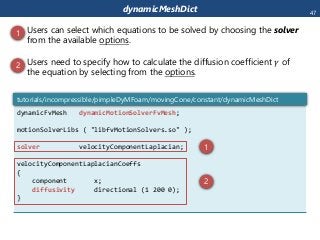
Users can select which equations to be solved.
Users need to specify how to calculate the diffusion coefficient 𝛾 of the
equation.
46](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-46-320.jpg)
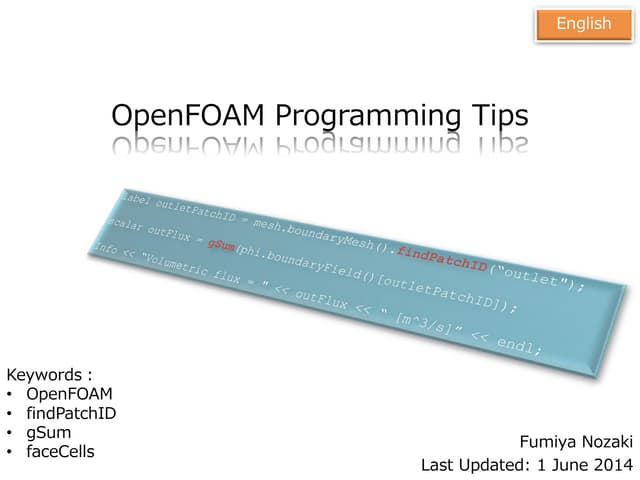
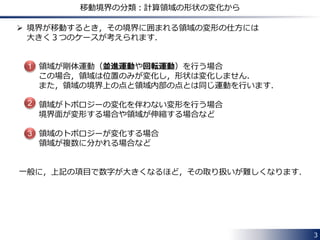
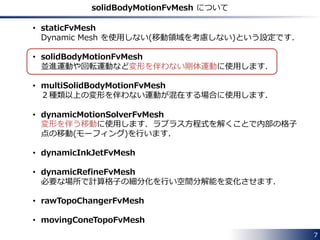
![Available types of solver
Solving for cellDisplacement (unit: [𝑚])
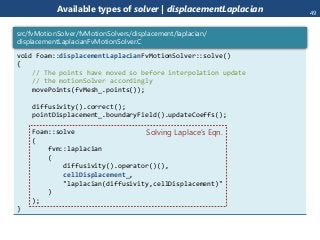
• displacementLaplacian
• displacementComponentLaplacian
• displacementInterpolation
• displacementLayeredMotion
• displacementSBRStress
Solving for cellMotionU (unit: [ 𝑚 𝑠])
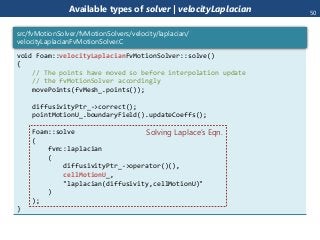
• velocityLaplacian
• velocityComponentLaplacian
48](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-48-320.jpg)






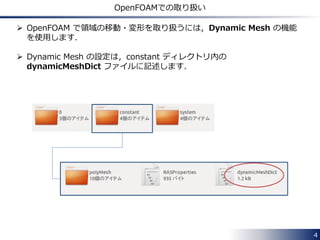
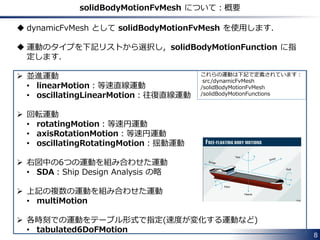
![curLeft_ = average
(
faceZones()
[
faceZones().findZoneID("leftExtrusionFaces")
]().localPoints()
).x() - SMALL;
curRight_ = average
(
faceZones()
[
faceZones().findZoneID("rightExtrusionFaces")
]().localPoints()
).x() + SMALL;
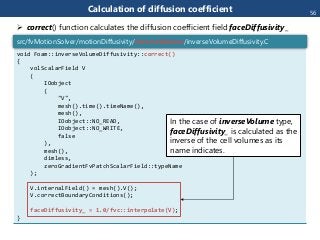
motionMask_ = vertexMarkup
(
points(),
curLeft_,
curRight_
);
}
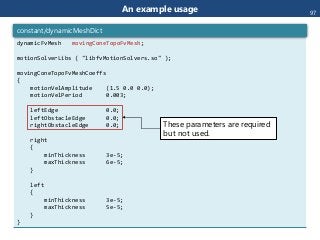
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
Constructors (cont’d) 100
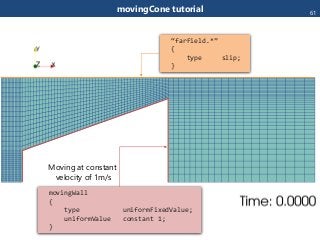
The initial x-coordinates of left and
right sides of the moving obstacle
(curLeft_ and curRight_) are calculated
using the faceZones.](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-100-320.jpg)
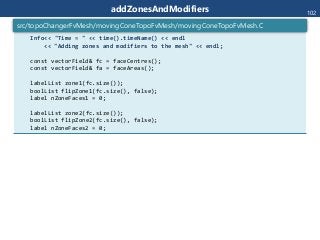
![addZonesAndModifiers
forAll(fc, faceI)
{
if
(
fc[faceI].x() > -0.003501
&& fc[faceI].x() < -0.003499
)
{
if ((fa[faceI] & vector(1, 0, 0)) < 0)
{
flipZone1[nZoneFaces1] = true;
}
zone1[nZoneFaces1] = faceI;
Info<< "face " << faceI << " for zone 1. Flip: "
<< flipZone1[nZoneFaces1] << endl;
nZoneFaces1++;
}
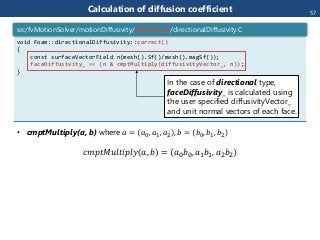
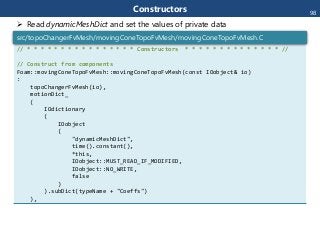
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
103
The faces whose center x-coordinates are
greater than -0.003501 and less than -0.003499
are added to the labelList zone1.
These hard-coded values are designed for movingCone tutorial.
For
movingCone
tutorial](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-103-320.jpg)
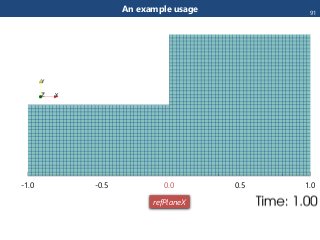
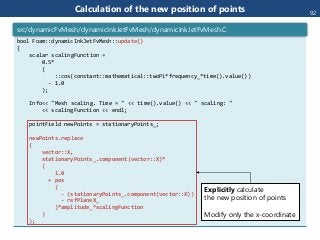
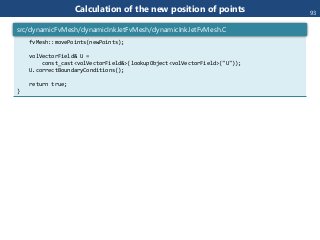
![addZonesAndModifiers
else if
(
fc[faceI].x() > -0.00701
&& fc[faceI].x() < -0.00699
)
{
if ((fa[faceI] & vector(1, 0, 0)) > 0)
{
flipZone2[nZoneFaces2] = true;
}
zone2[nZoneFaces2] = faceI;
Info<< "face " << faceI << " for zone 2. Flip: "
<< flipZone2[nZoneFaces2] << endl;
nZoneFaces2++;
}
}
zone1.setSize(nZoneFaces1);
flipZone1.setSize(nZoneFaces1);
zone2.setSize(nZoneFaces2);
flipZone2.setSize(nZoneFaces2);
Info<< "zone: " << zone1 << endl;
Info<< "zone: " << zone2 << endl;
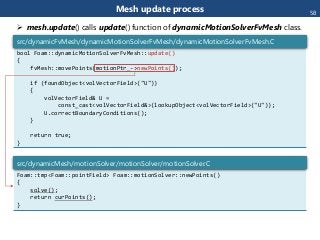
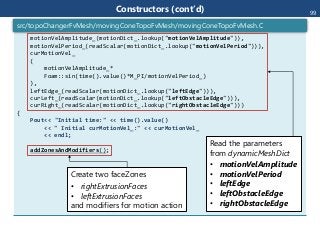
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
104
The faces whose center x-coordinates are
greater than -0.00701 and less than -0.00699
are added to the labelList zone2.
Reset the size of four lists.
For
movingCone
tutorial](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-104-320.jpg)
![addZonesAndModifiers
List<pointZone*> pz(0);
List<faceZone*> fz(2);
List<cellZone*> cz(0);
label nFz = 0;
fz[nFz] =
new faceZone
(
"rightExtrusionFaces",
zone1,
flipZone1,
nFz,
faceZones()
);
nFz++;
fz[nFz] =
new faceZone
(
"leftExtrusionFaces",
zone2,
flipZone2,
nFz,
faceZones()
);
nFz++;
fz.setSize(nFz);
Info<< "Adding mesh zones." << endl;
addZones(pz, fz, cz);
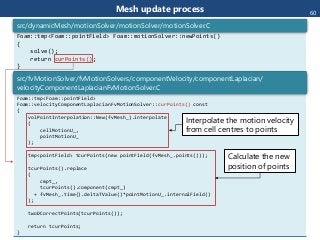
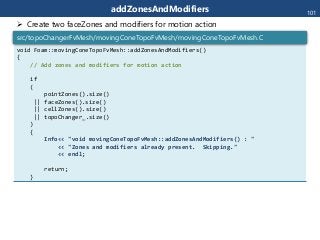
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
105
Create two faceZones
• rightExtrusionFaces
from zone1 and flipZone1
• leftExtrusionFaces
from zone2 and flipZone2](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-105-320.jpg)
![addZonesAndModifiers
// Add layer addition/removal interfaces
List<polyMeshModifier*> tm(2);
label nMods = 0;
tm[nMods] =
new layerAdditionRemoval
(
"right",
nMods,
topoChanger_,
"rightExtrusionFaces",
readScalar
(
motionDict_.subDict("right").lookup("minThickness")
),
readScalar
(
motionDict_.subDict("right").lookup("maxThickness")
)
);
nMods++;
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
106](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-106-320.jpg)
![addZonesAndModifiers
tm[nMods] = new layerAdditionRemoval
(
"left",
nMods,
topoChanger_,
"leftExtrusionFaces",
readScalar
(
motionDict_.subDict("left").lookup("minThickness")
),
readScalar
(
motionDict_.subDict("left").lookup("maxThickness")
)
);
nMods++;
tm.setSize(nMods);
Info<< "Adding " << nMods << " mesh modifiers" << endl;
topoChanger_.addTopologyModifiers(tm);
write();
}
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
107](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-107-320.jpg)
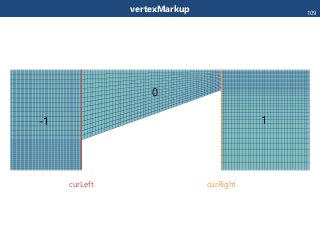
![vertexMarkup
Foam::tmp<Foam::scalarField> Foam::movingConeTopoFvMesh::vertexMarkup
(
const pointField& p,
const scalar curLeft,
const scalar curRight
) const
{
Info<< "Updating vertex markup. curLeft: "
<< curLeft << " curRight: " << curRight << endl;
tmp<scalarField> tvertexMarkup(new scalarField(p.size()));
scalarField& vertexMarkup = tvertexMarkup();
forAll(p, pI)
{
if (p[pI].x() < curLeft - SMALL)
{
vertexMarkup[pI] = -1;
}
else if (p[pI].x() > curRight + SMALL)
{
vertexMarkup[pI] = 1;
}
else
{
vertexMarkup[pI] = 0;
}
}
return tvertexMarkup;
}
src/topoChangerFvMesh/movingConeTopoFvMesh/movingConeTopoFvMesh.C
108
Classify the points by their positions](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-108-320.jpg)
![References
[1] Roll Motion of a Box and Interaction with Free-Surface
http://www.tfd.chalmers.se/~hani/kurser/OS_CFD_2009/ArashEslamdoost/RollMotionofaBoxandInteracti
onwithFreeSurface.pdf
[2] A tutorial on how to use Dynamic Mesh solver IcoDyMFOAM
http://www.tfd.chalmers.se/~hani/kurser/OS_CFD_2007/PiroozMoradnia/OpenFOAM-rapport.pdf
[3] Mesh motion alternatives
http://www.tfd.chalmers.se/~hani/kurser/OS_CFD_2009/AndreuOliverGonzalez/PresentationFINAL_Mesh
MotionAlternatives.pdf
[4] OpenFOAM project: A modification of the movingConeTopoFvMesh library
http://www.tfd.chalmers.se/~hani/kurser/OS_CFD_2008/ErikBjerklund/OpenFoamBjerklundE3.pdf
[5] Dynamic mesh in OpenFOAM
https://ilyasivkov.wordpress.com/2015/04/23/dynamic-mesh-in-openfoam/
110](https://image.slidesharecdn.com/openfoamdynamicmesh20140302-140302022414-phpapp01/85/Dynamic-Mesh-in-OpenFOAM-110-320.jpg)

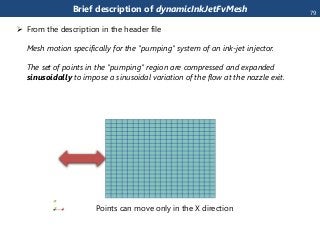
The document discusses dynamic mesh functionality in OpenFOAM. It describes how OpenFOAM handles mesh motions and topology changes using the Dynamic Mesh functionality. Settings for Dynamic Mesh are specified in the dynamicMeshDict file located in the constant directory. Solvers that can handle mesh changes have names containing "DyM", standing for Dynamic Mesh. Examples include pimpleDyMFoam and interDyMFoam. Various types of dynamic meshes are described, including those handling only motion and those enabling topological changes.