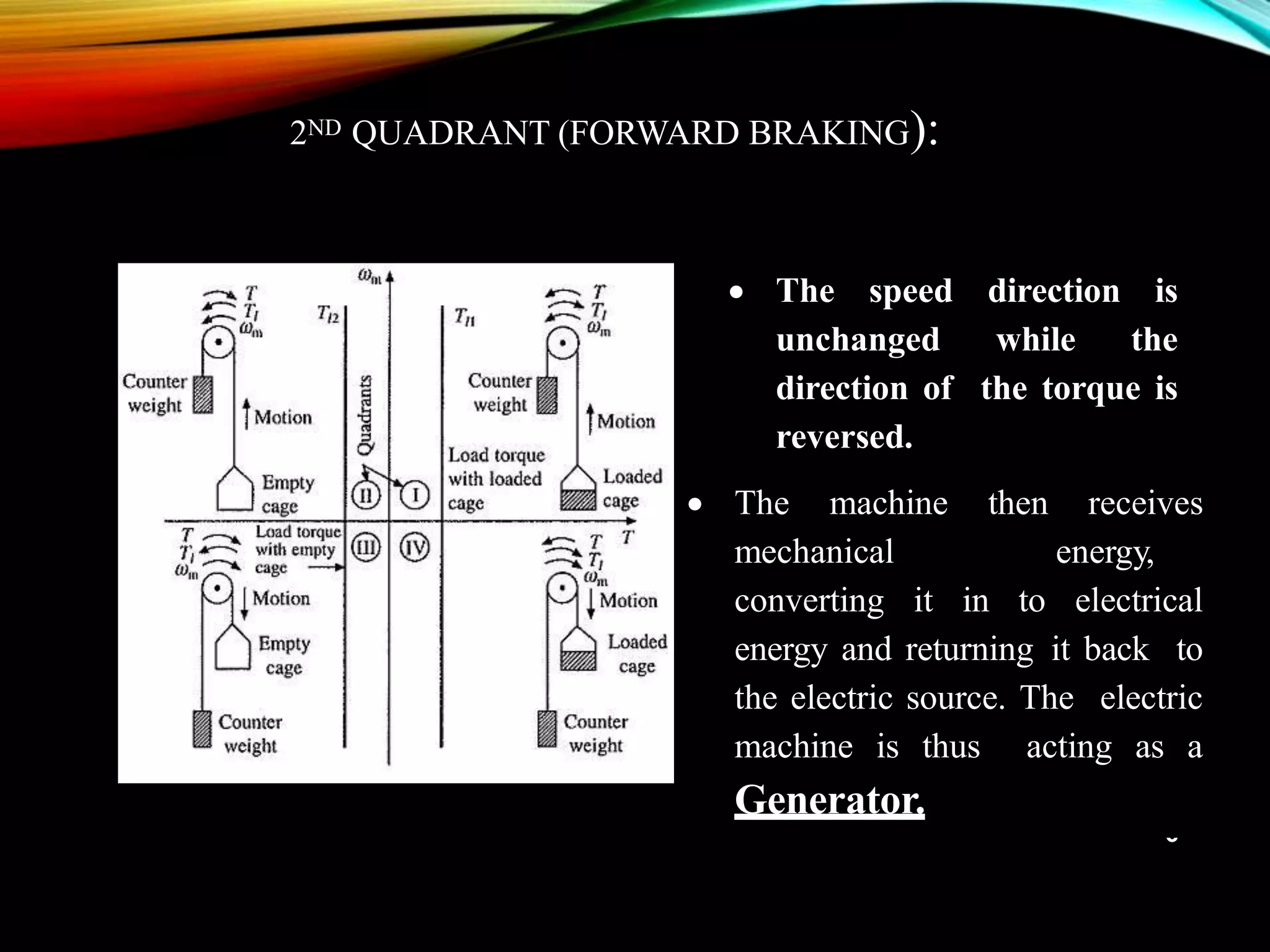
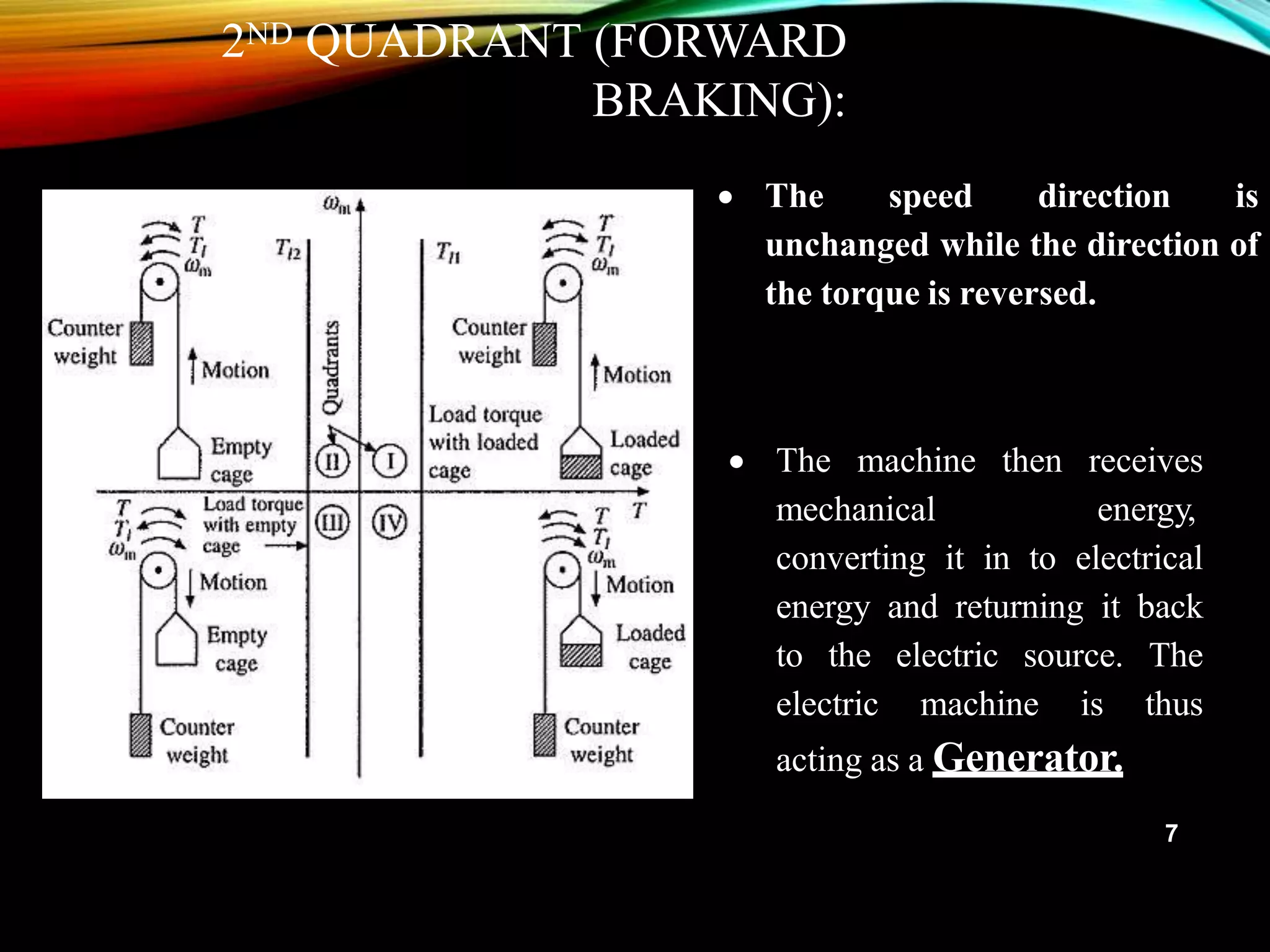
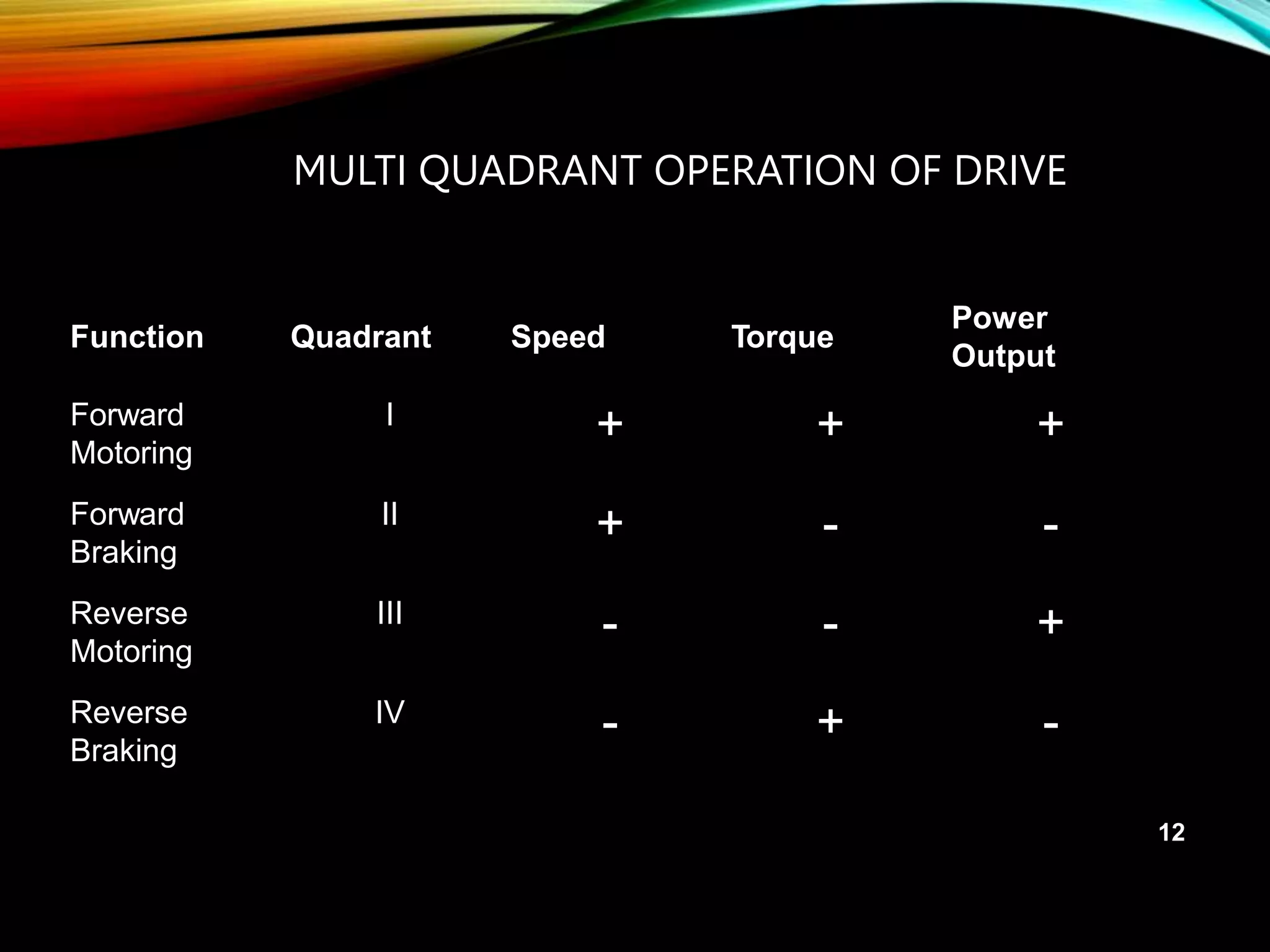
Four quadrant operation refers to a machine that can operate in four operating modes: forward motoring, forward braking, reverse motoring, and reverse braking. This is achieved by controlling both the direction of torque and the direction of speed. The document discusses four quadrant operation of hoist loads specifically, explaining that a hoist requires operation in all four quadrants to lift and lower loads both forwards and backwards. It provides examples of operation in each quadrant, with the first quadrant representing lifting the load forwards and the fourth quadrant lowering the load backwards through reversing the speed direction.