Downloaded 225 times

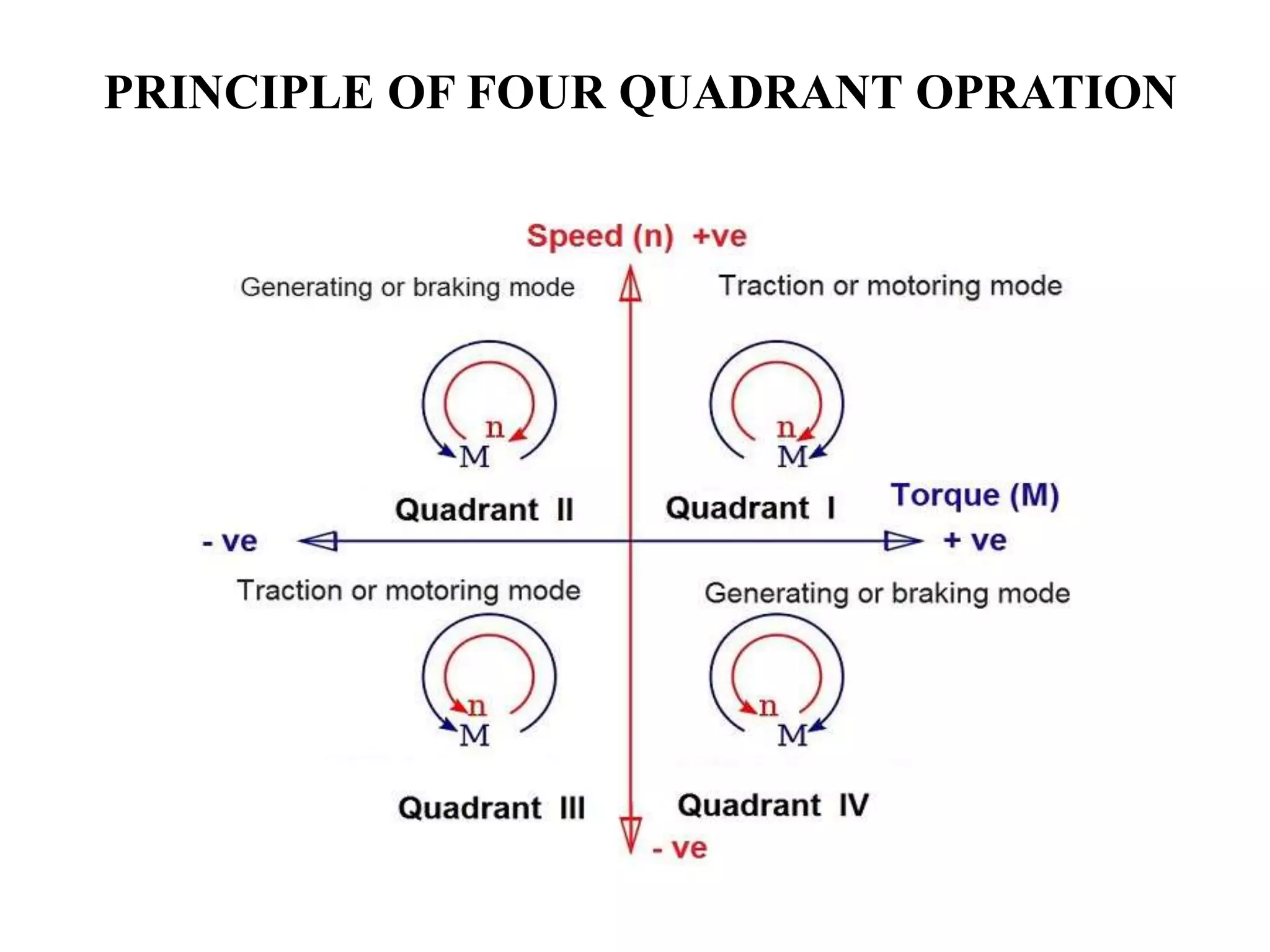
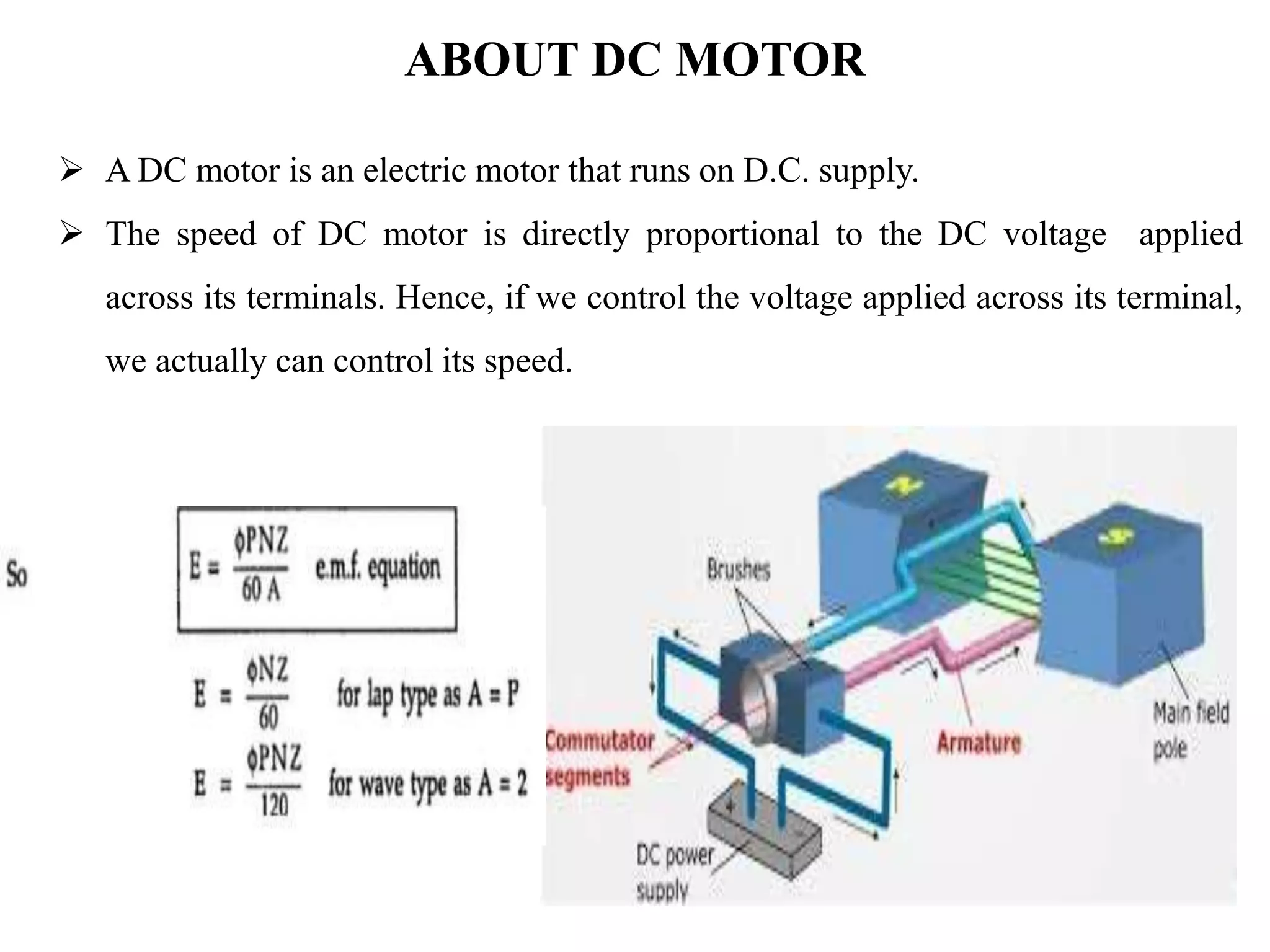
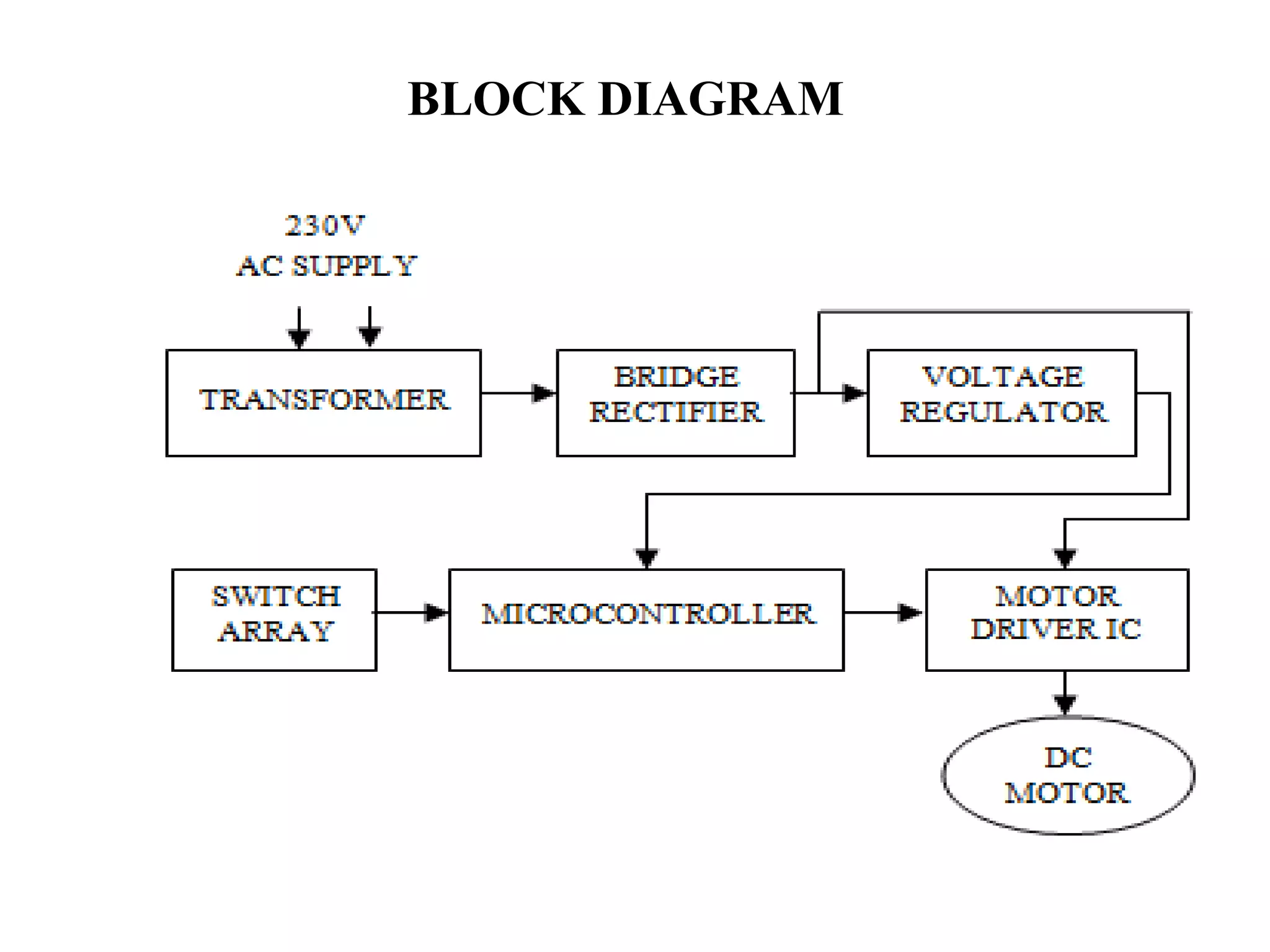
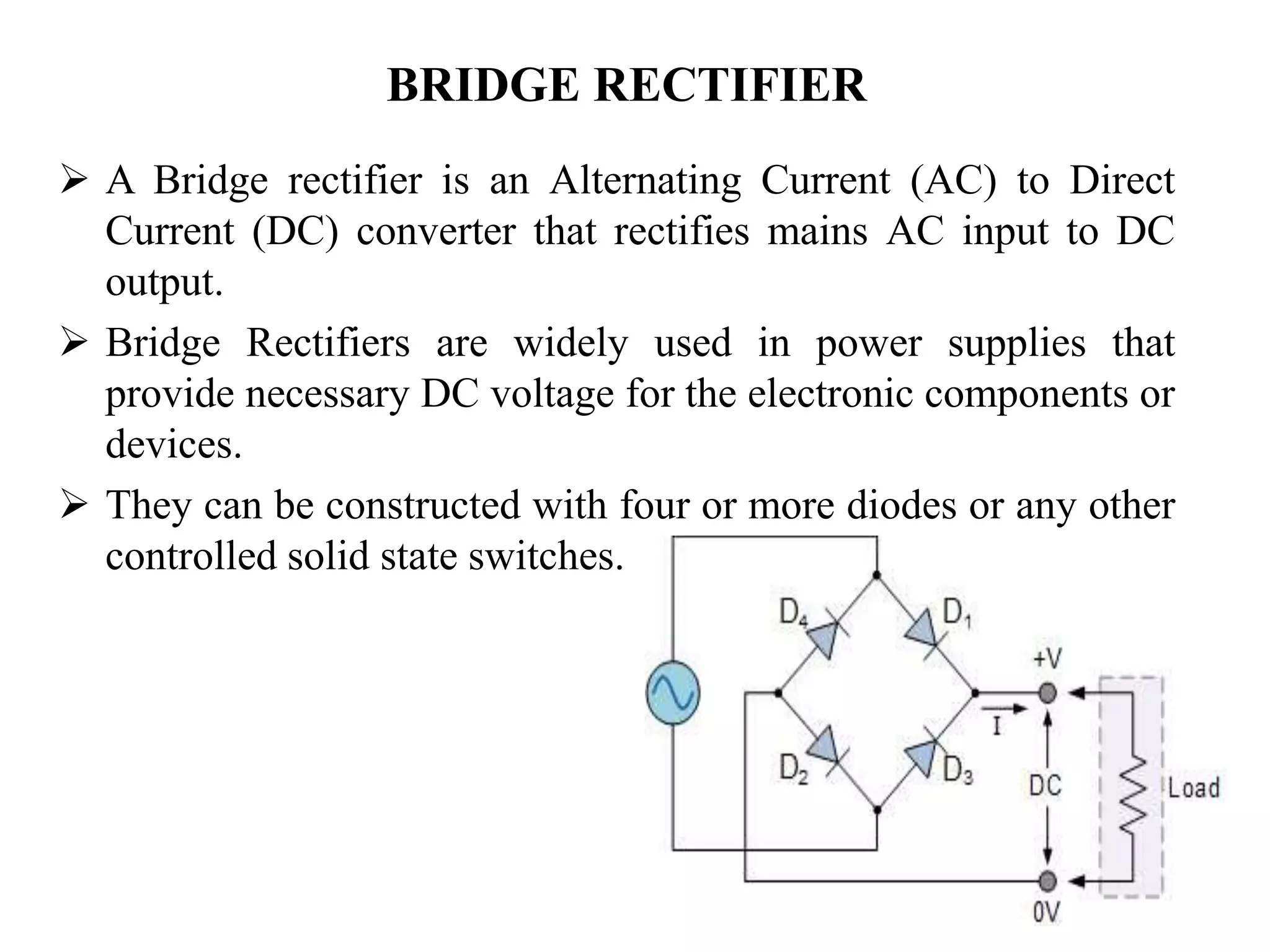
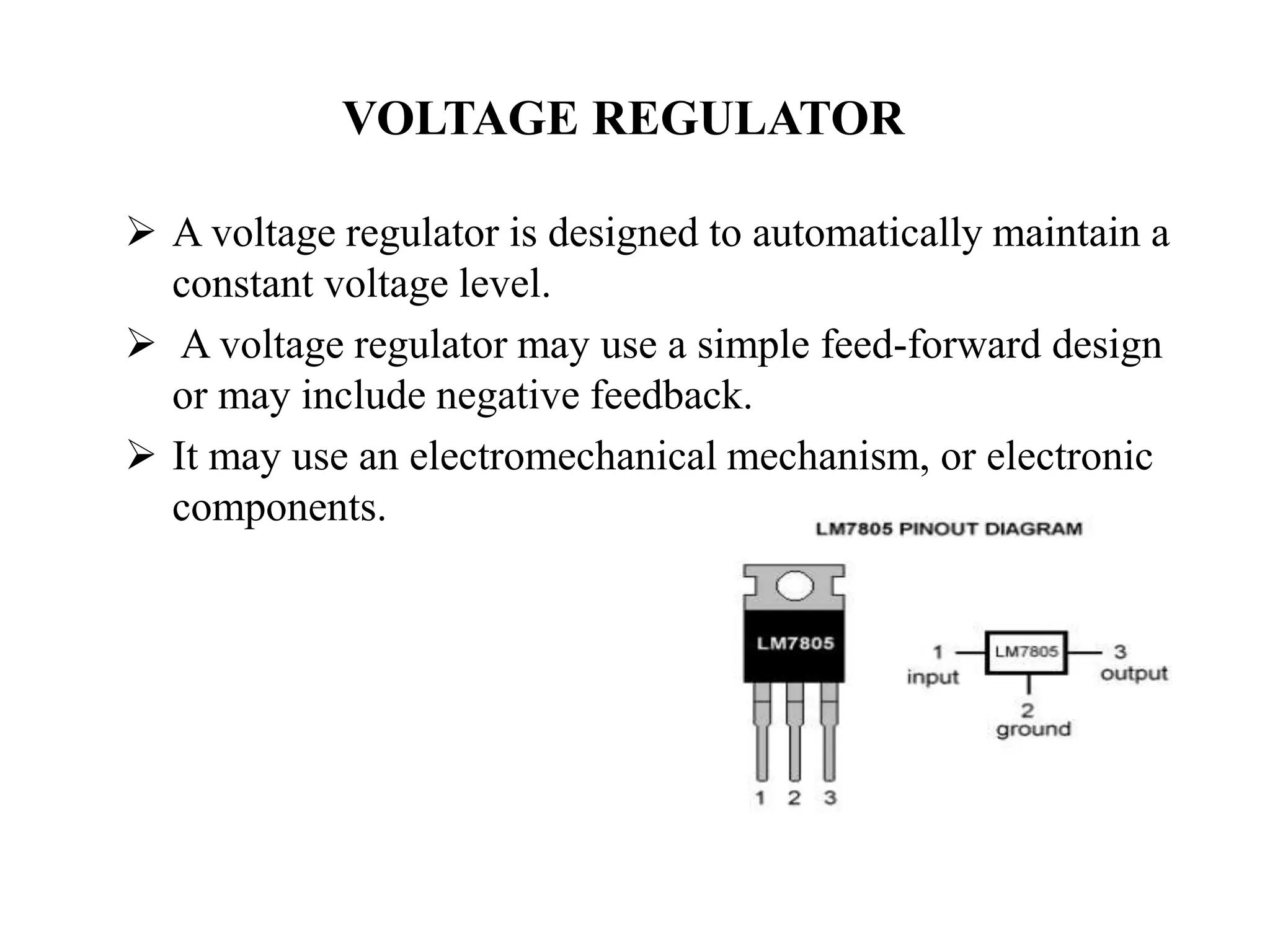
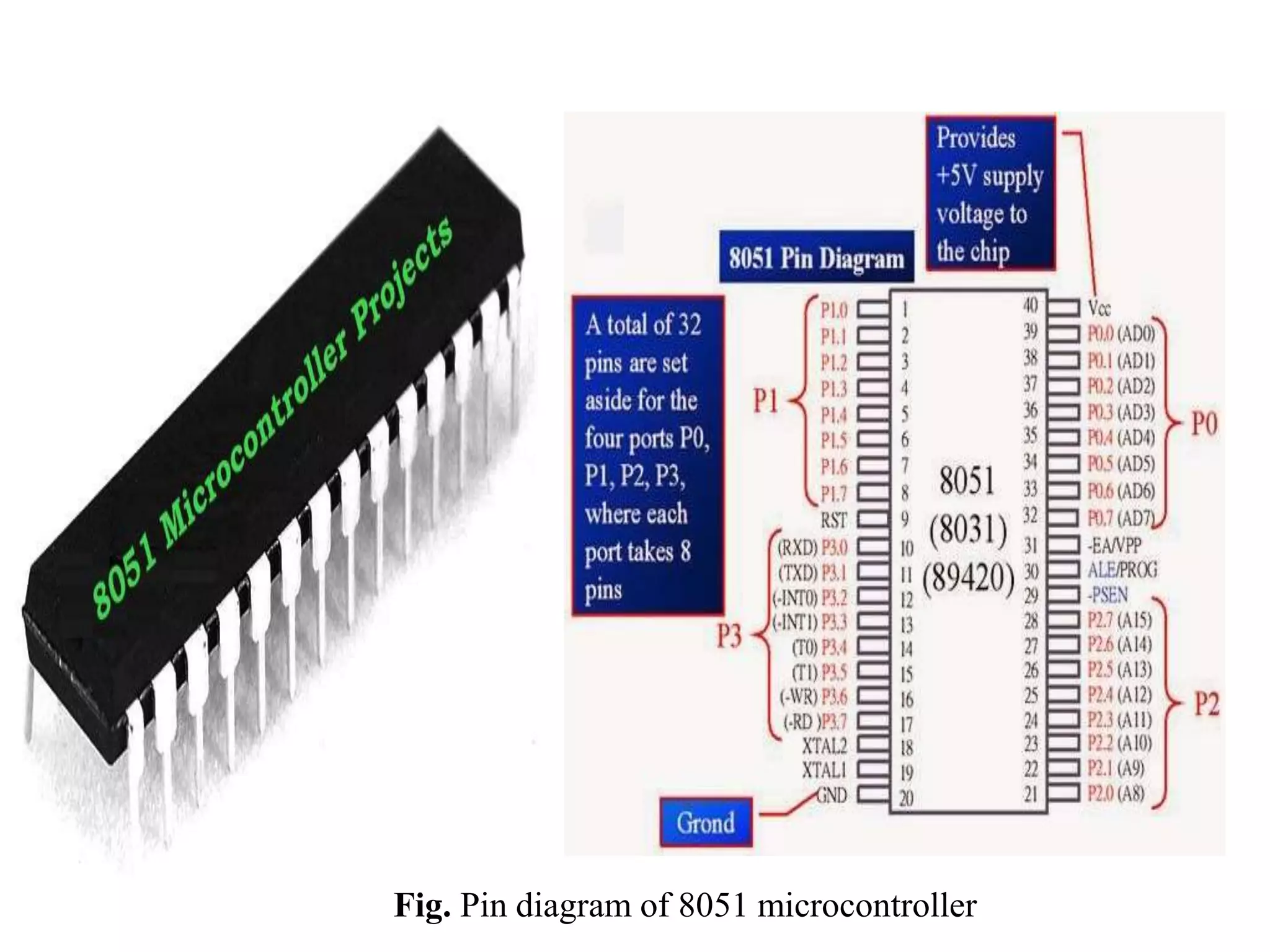
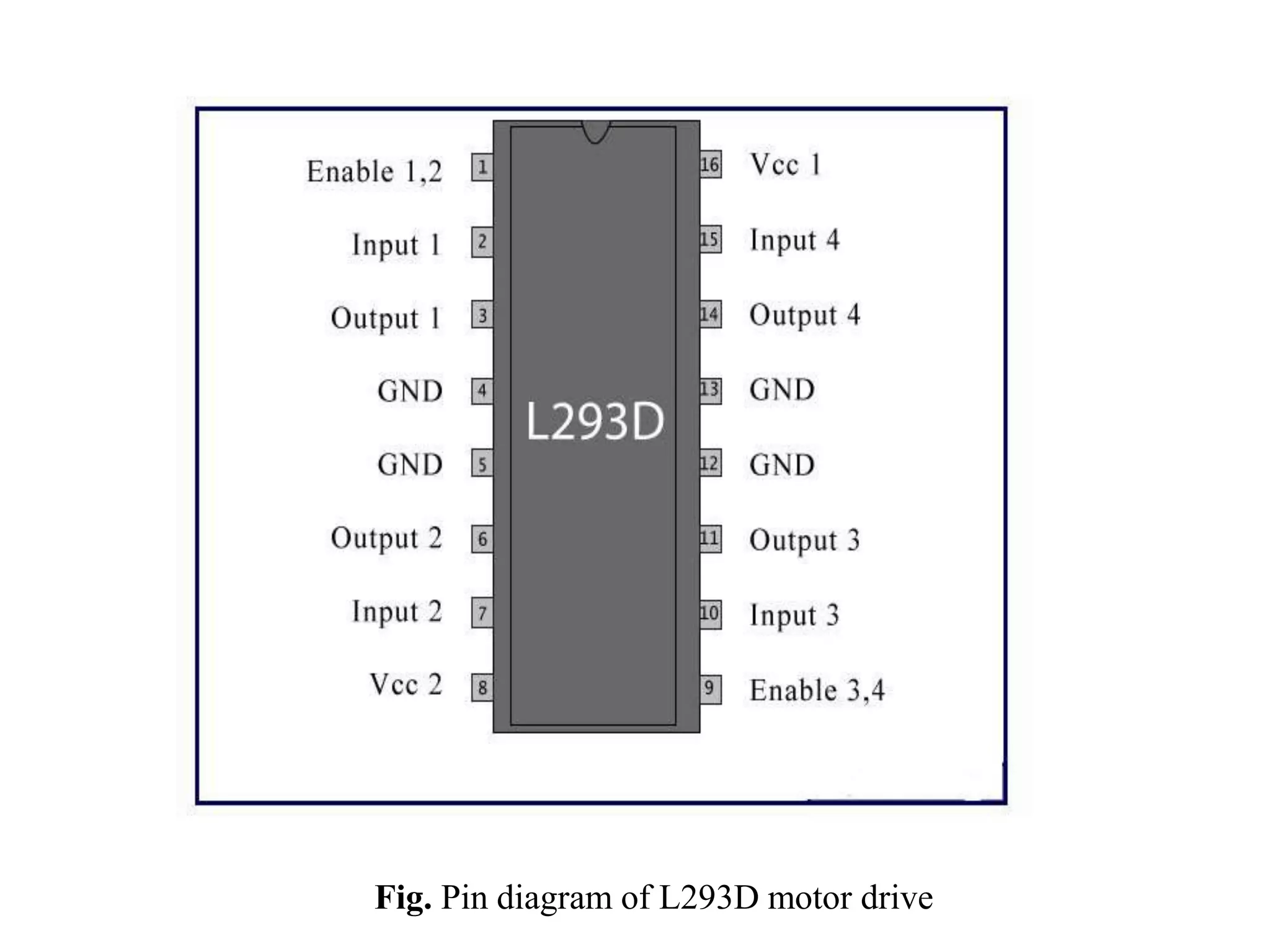
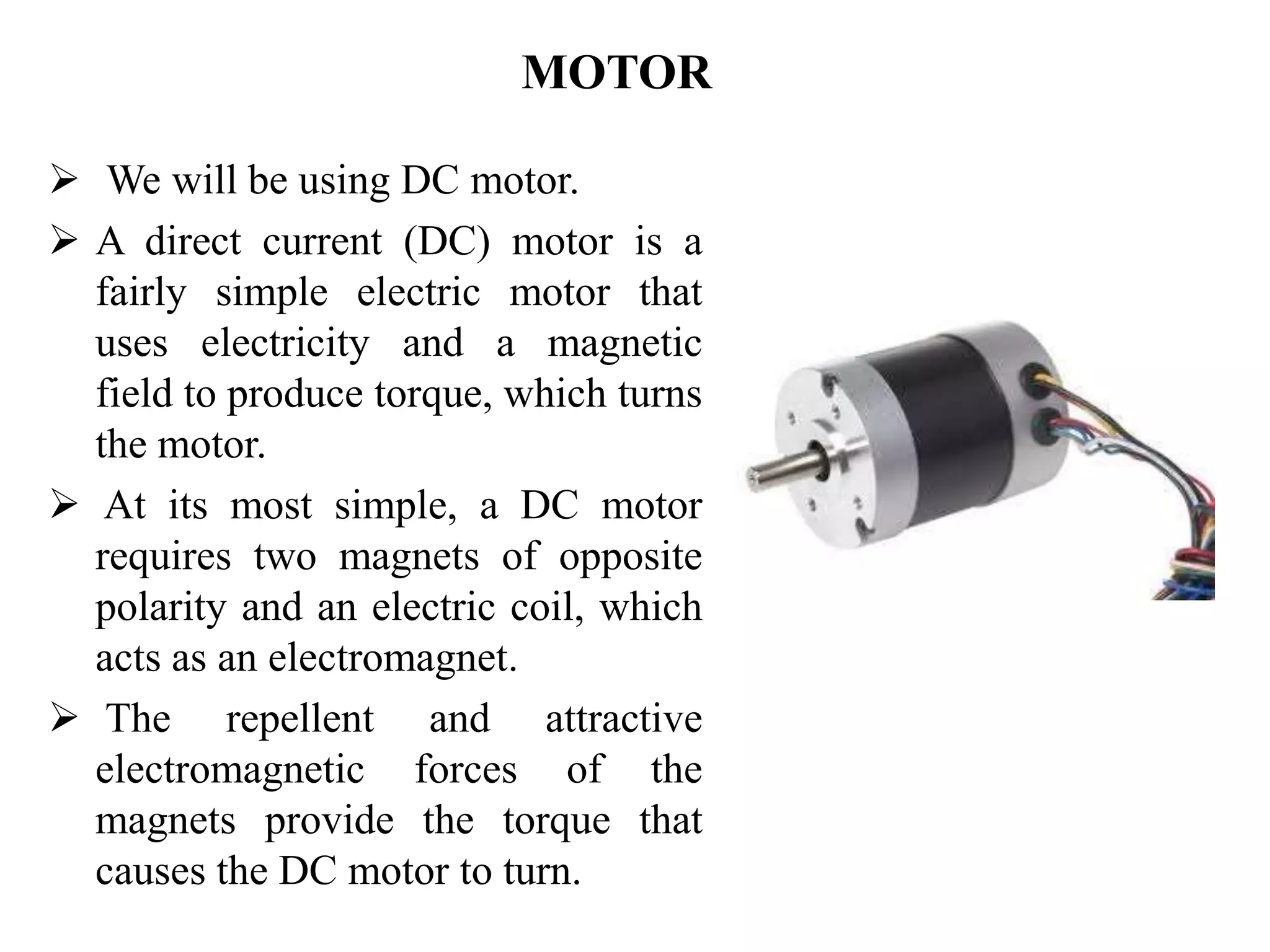
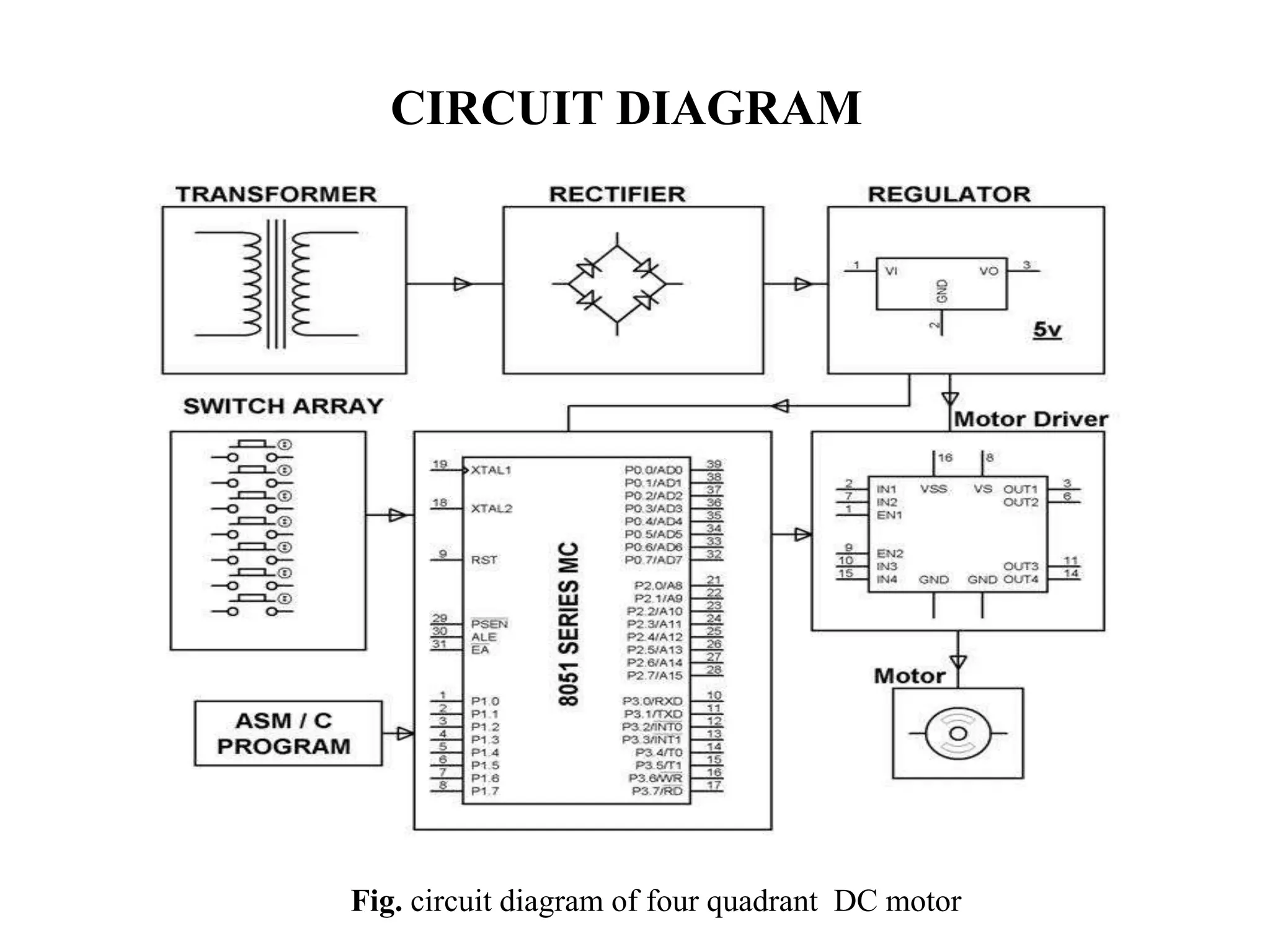


This document presents a project on four quadrant speed control of a DC motor using a microcontroller. It describes the basic principles of four quadrant operation and components used including a transformer, rectifier, regulator, 8051 microcontroller, motor driver, and DC motor. The circuit diagram and working are explained where the microcontroller provides control signals to the motor driver to run the motor forward, backward, or apply brakes. Potential applications include industrial automation and robotics. Future work may include wireless control using transmitters and receivers.