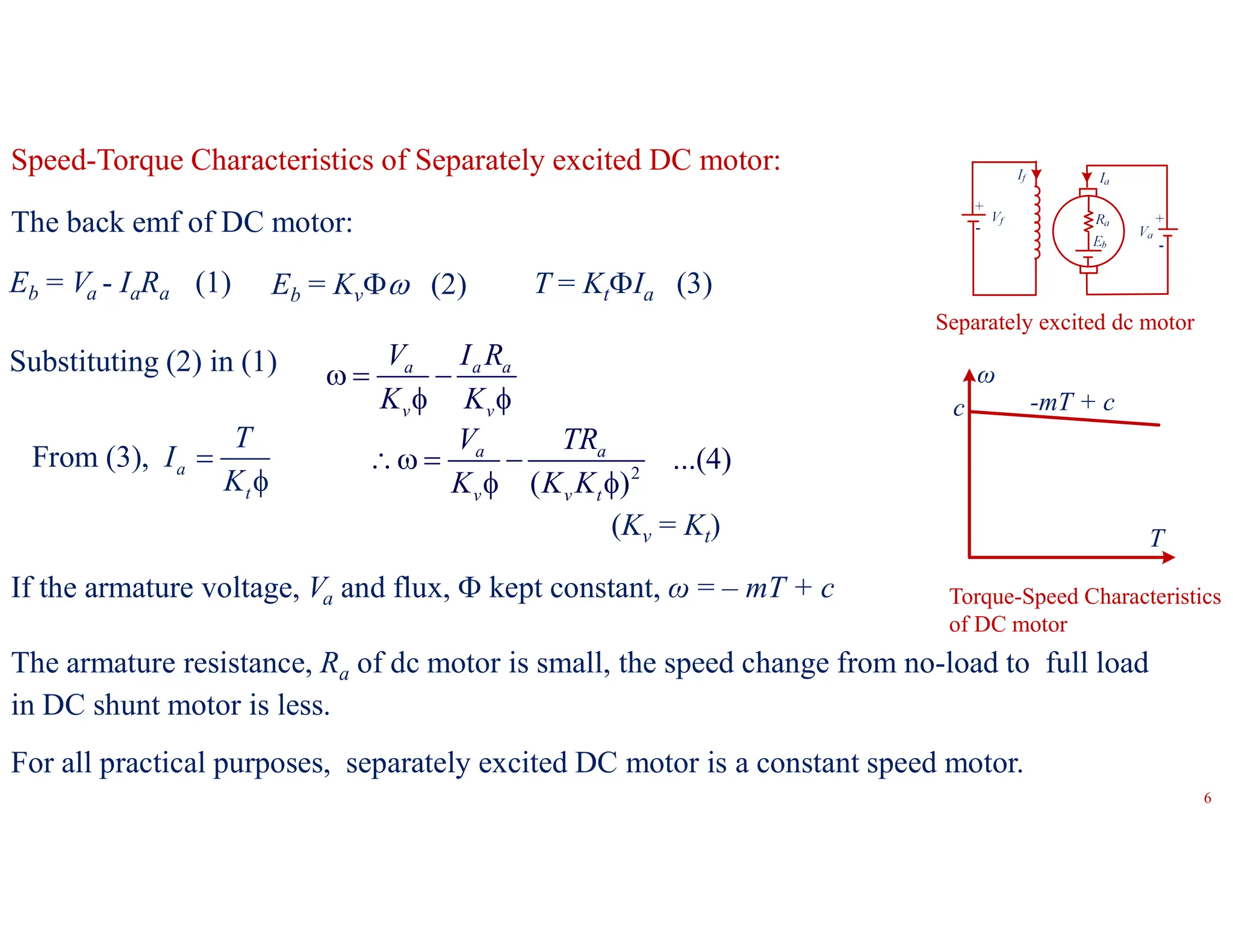
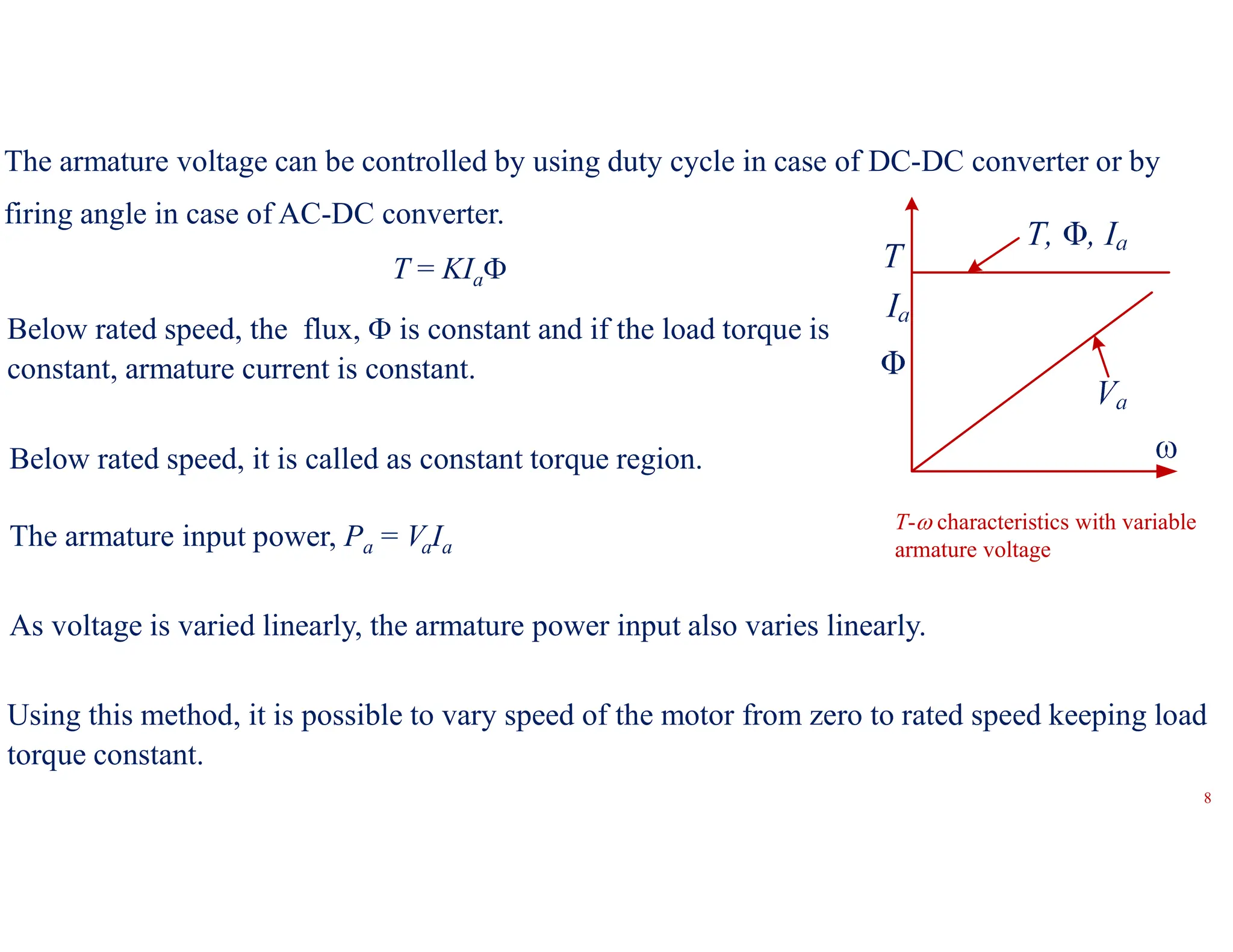
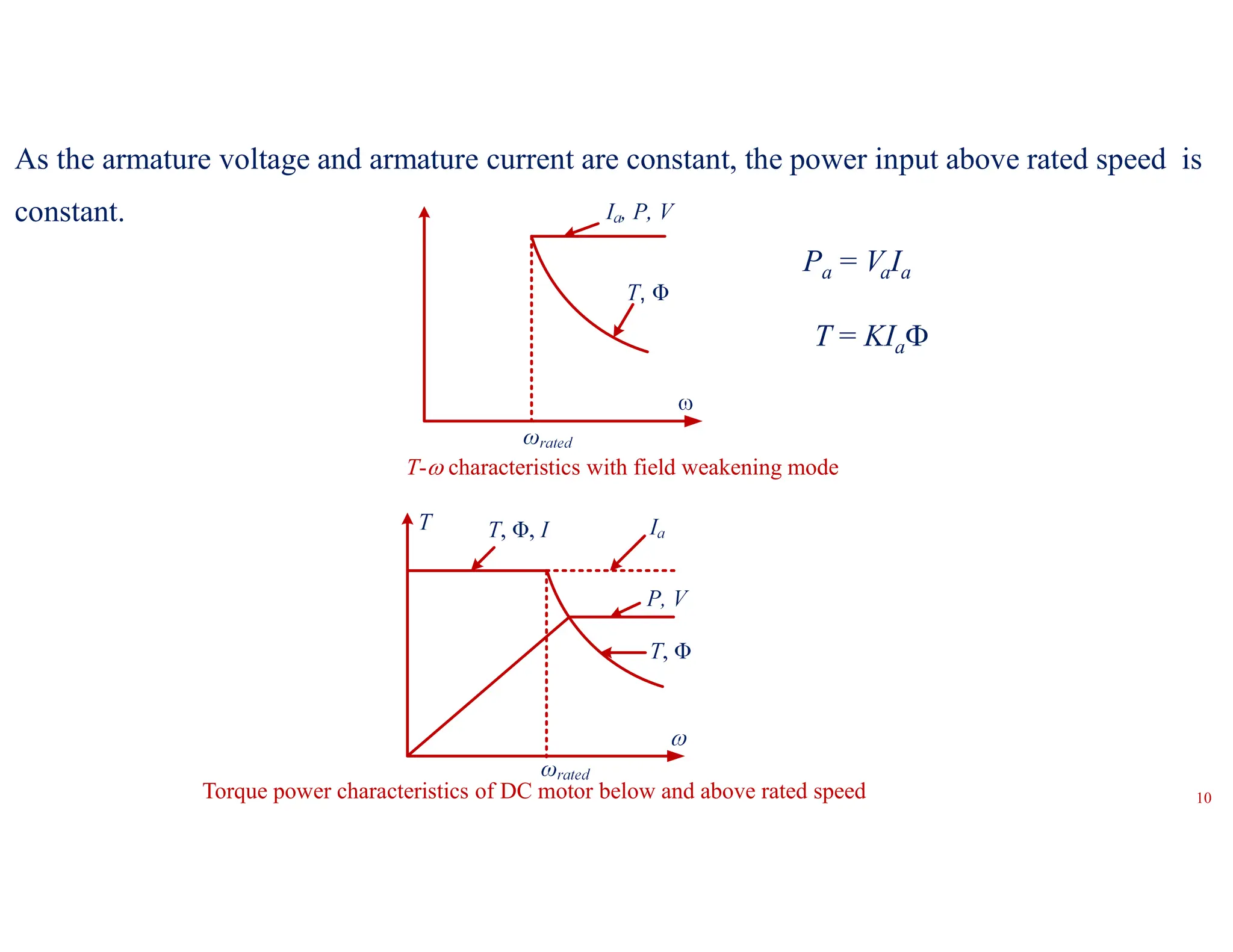
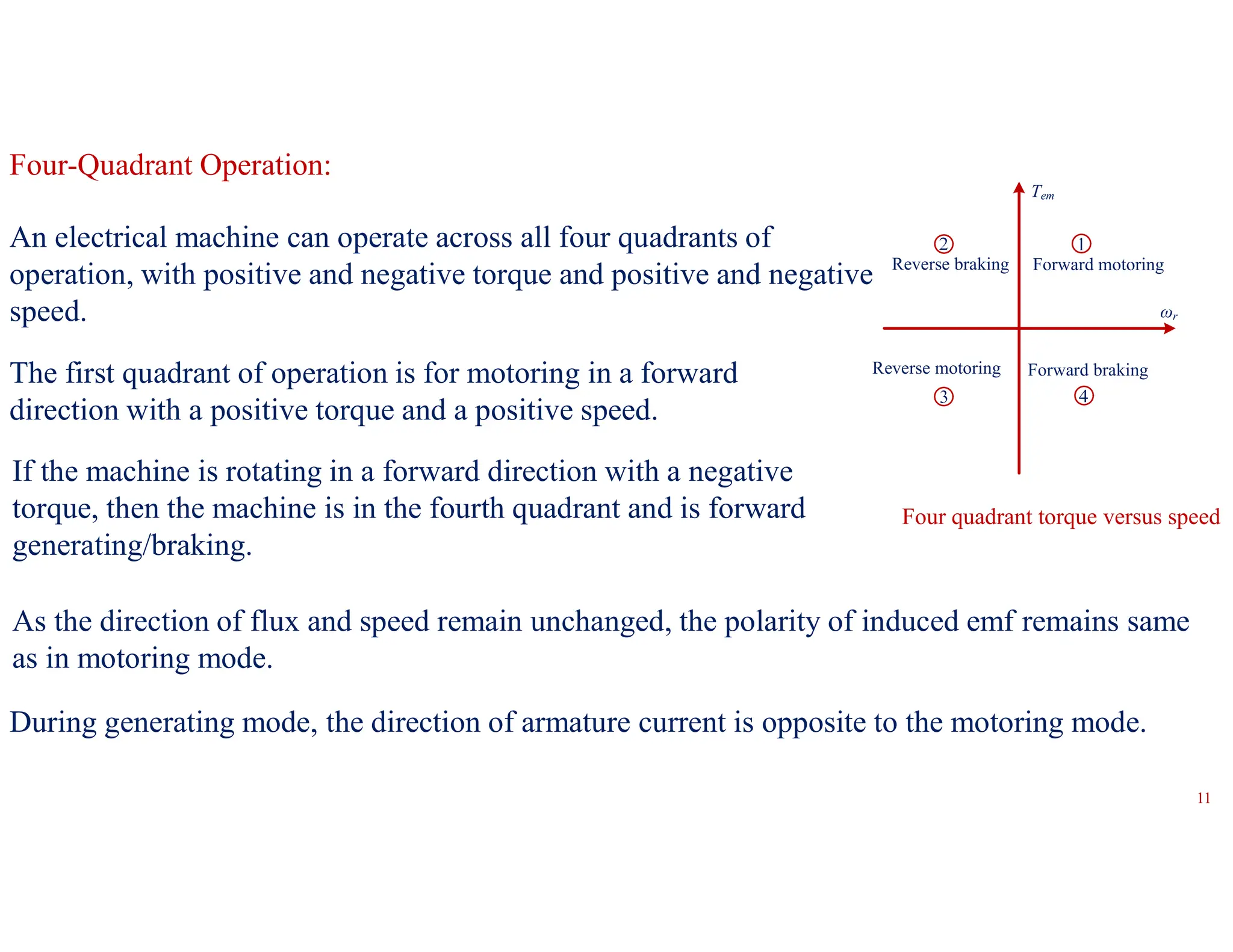
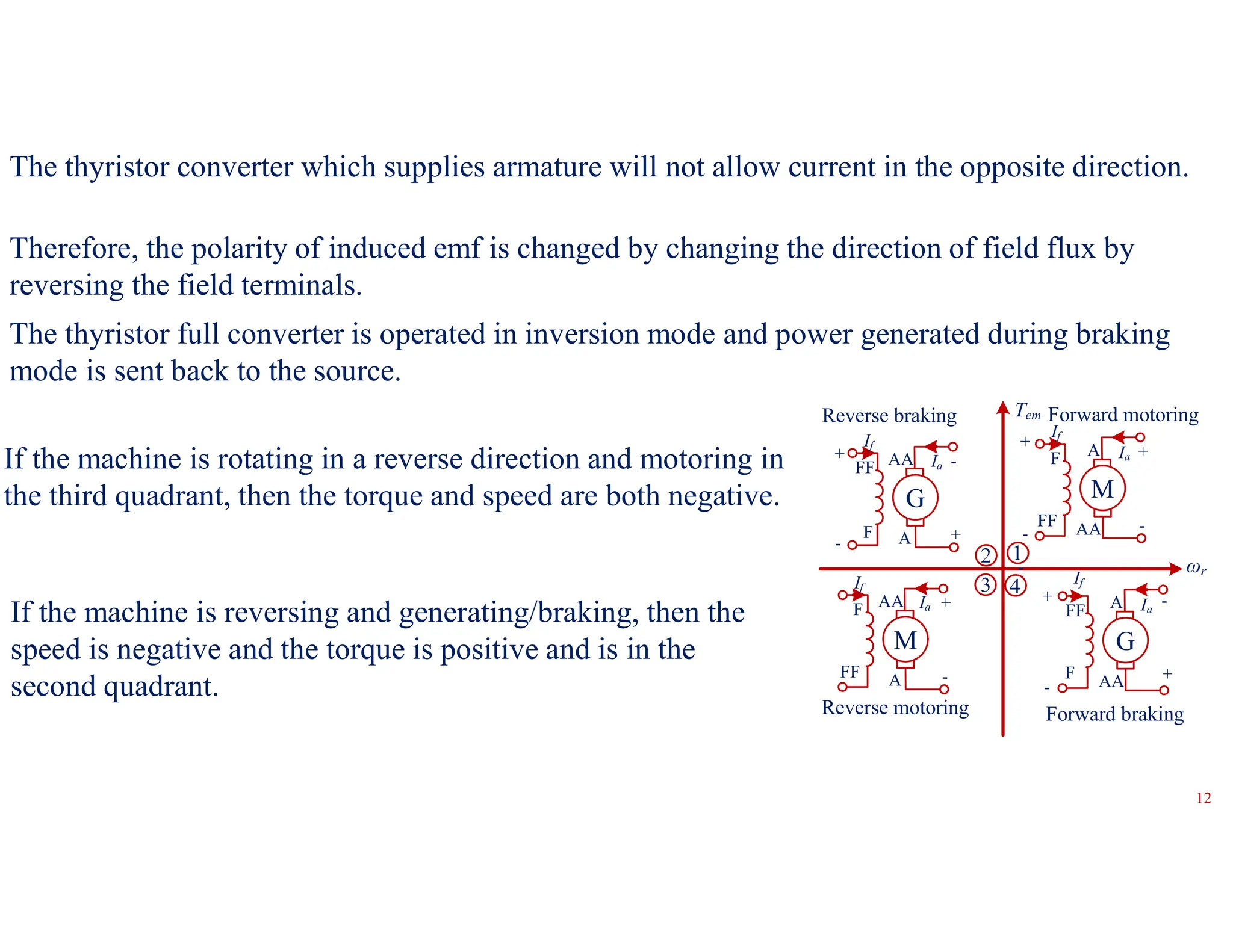
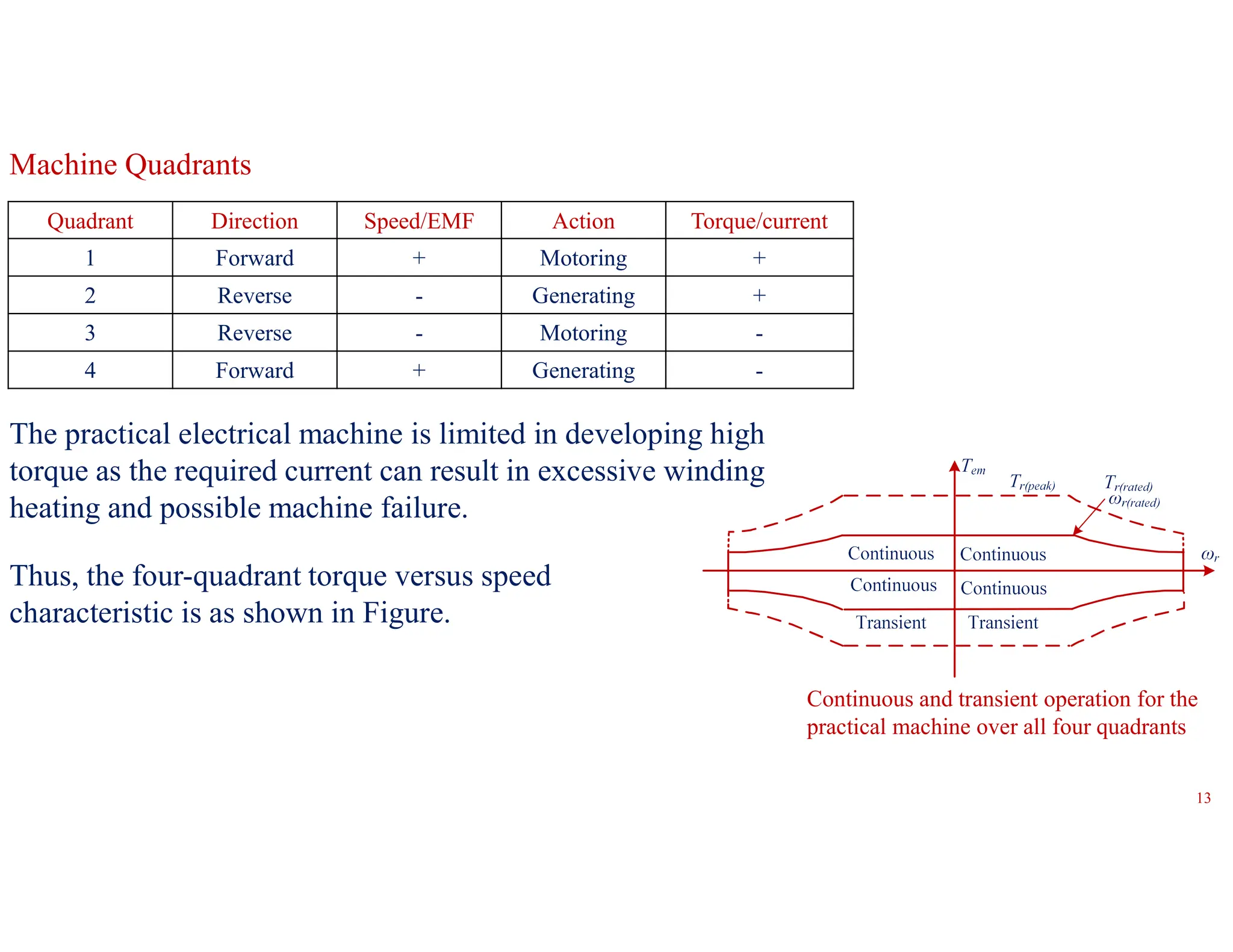
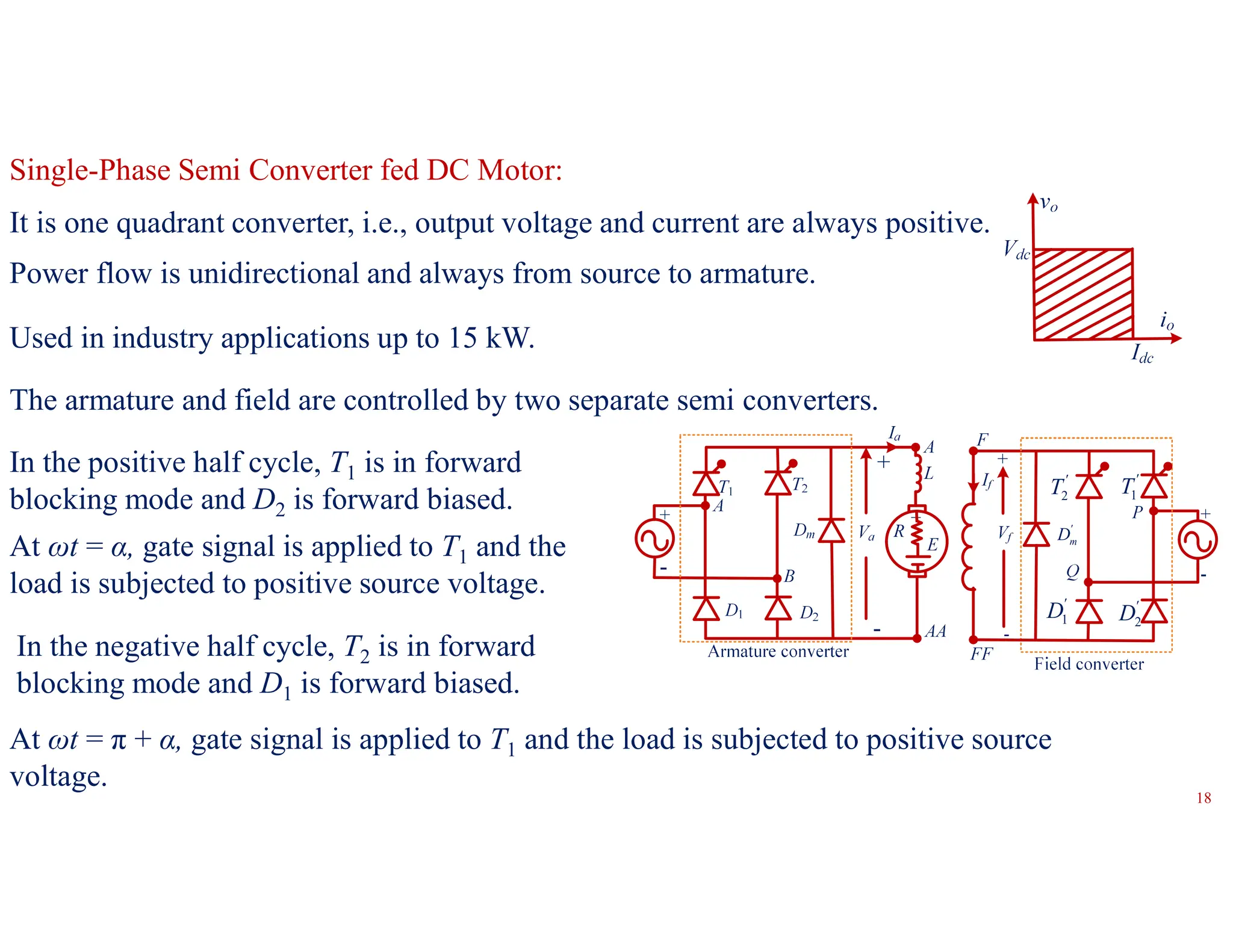
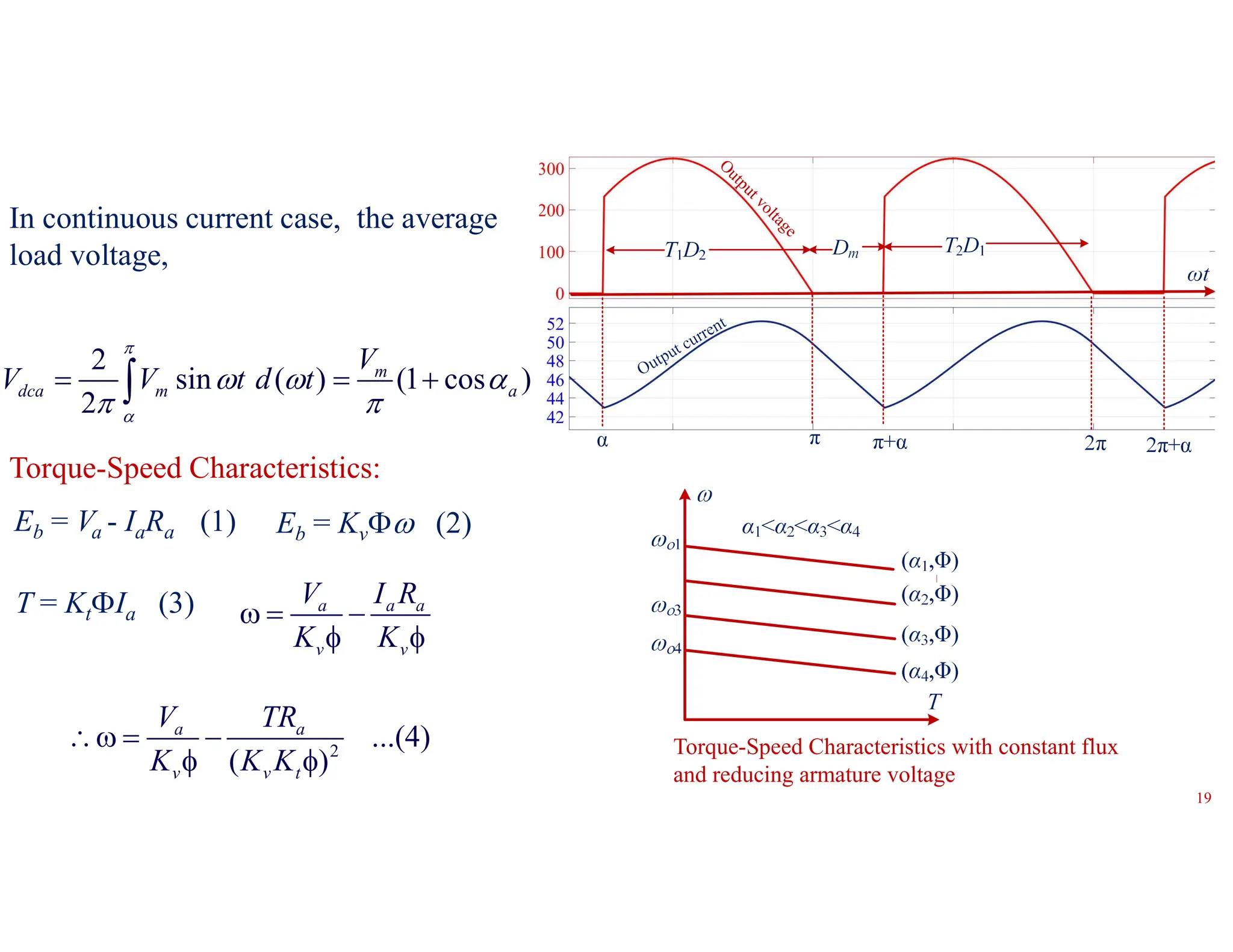
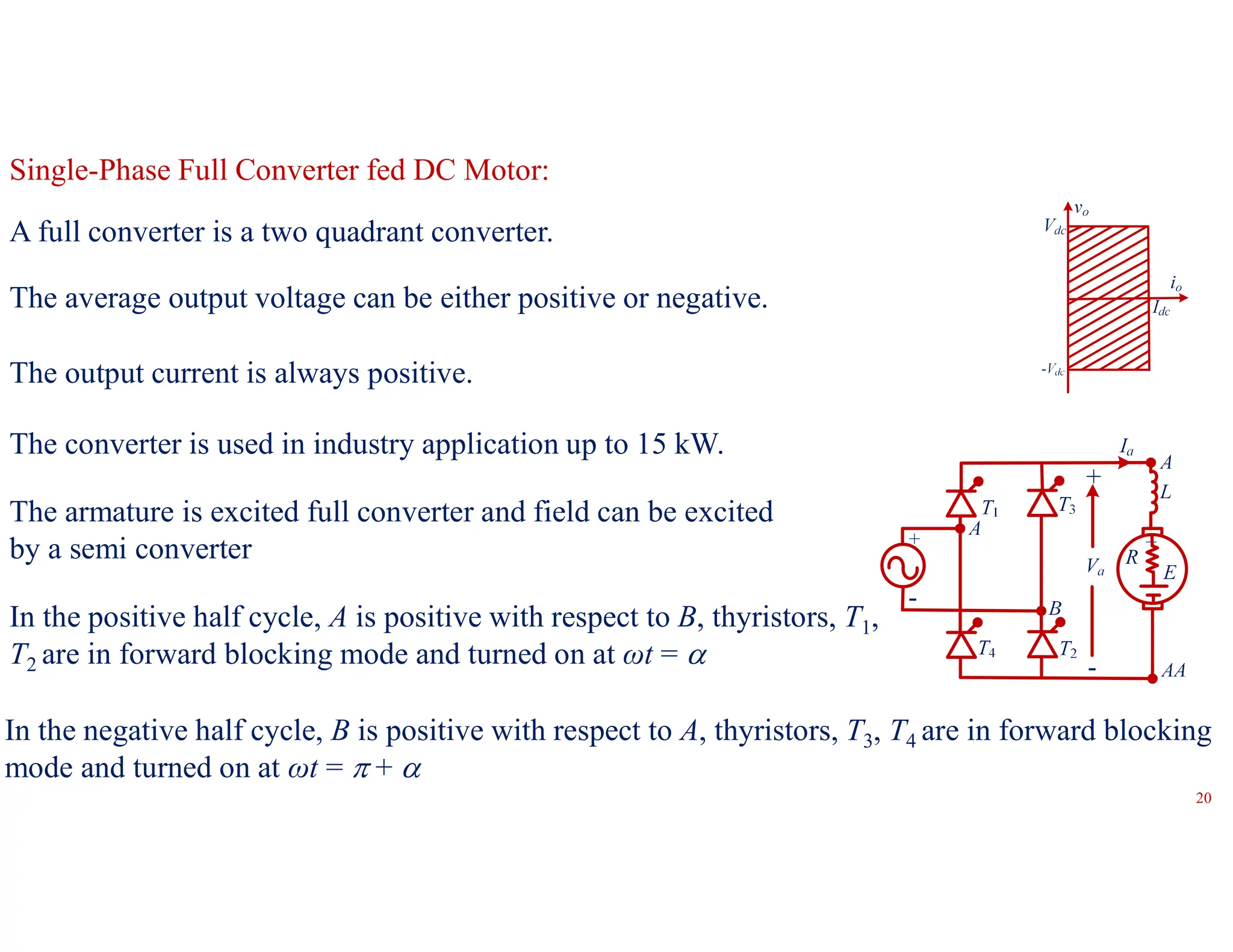
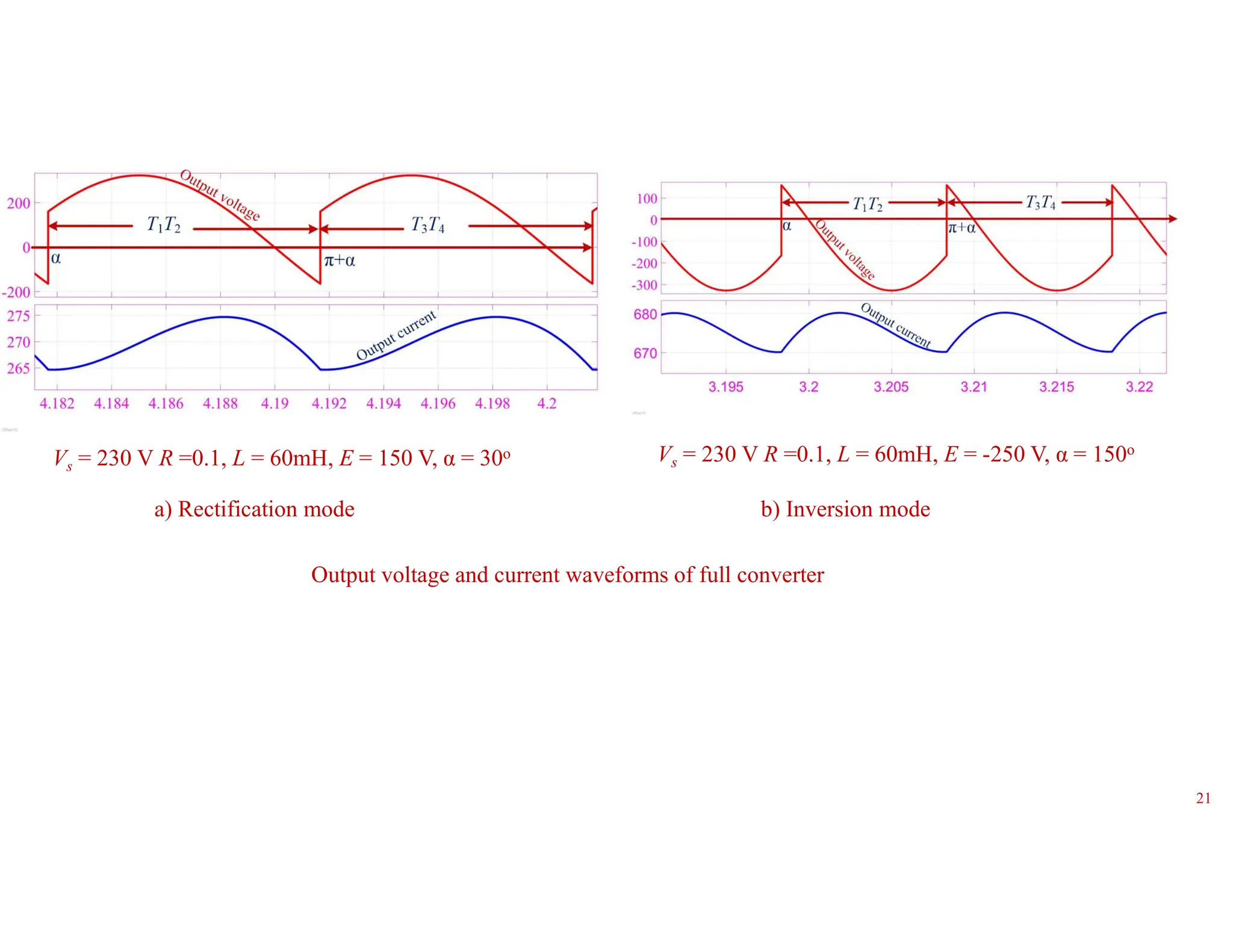
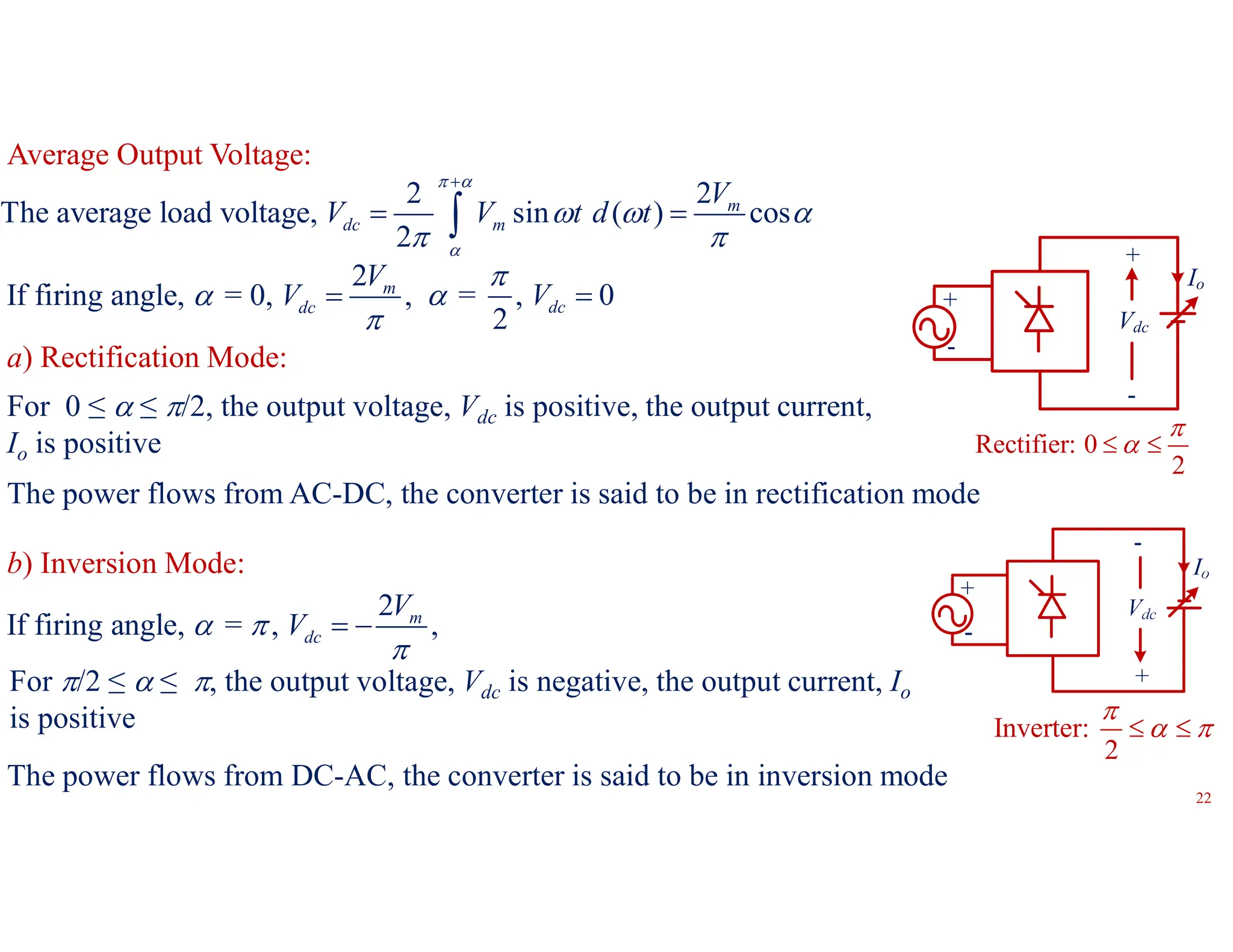
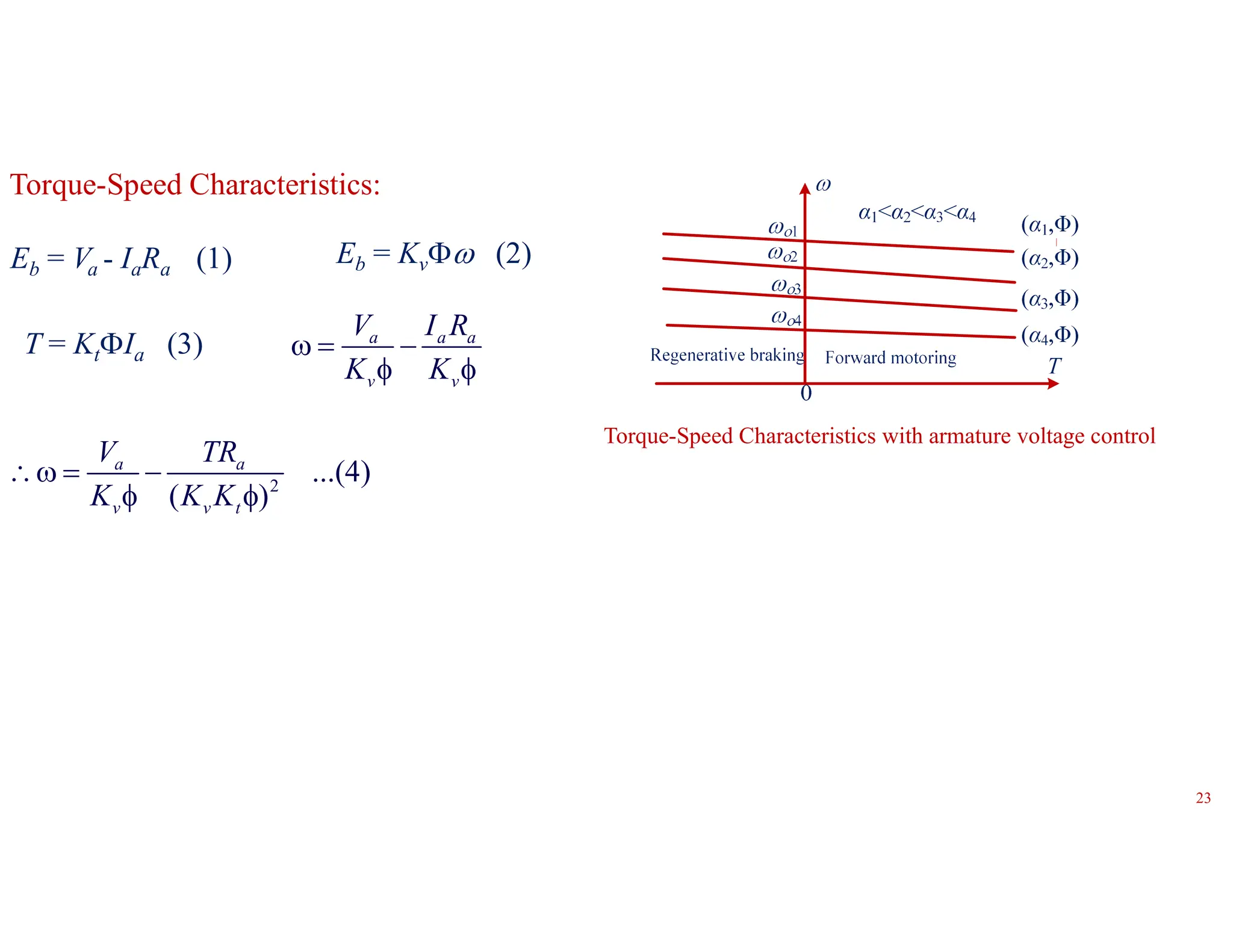
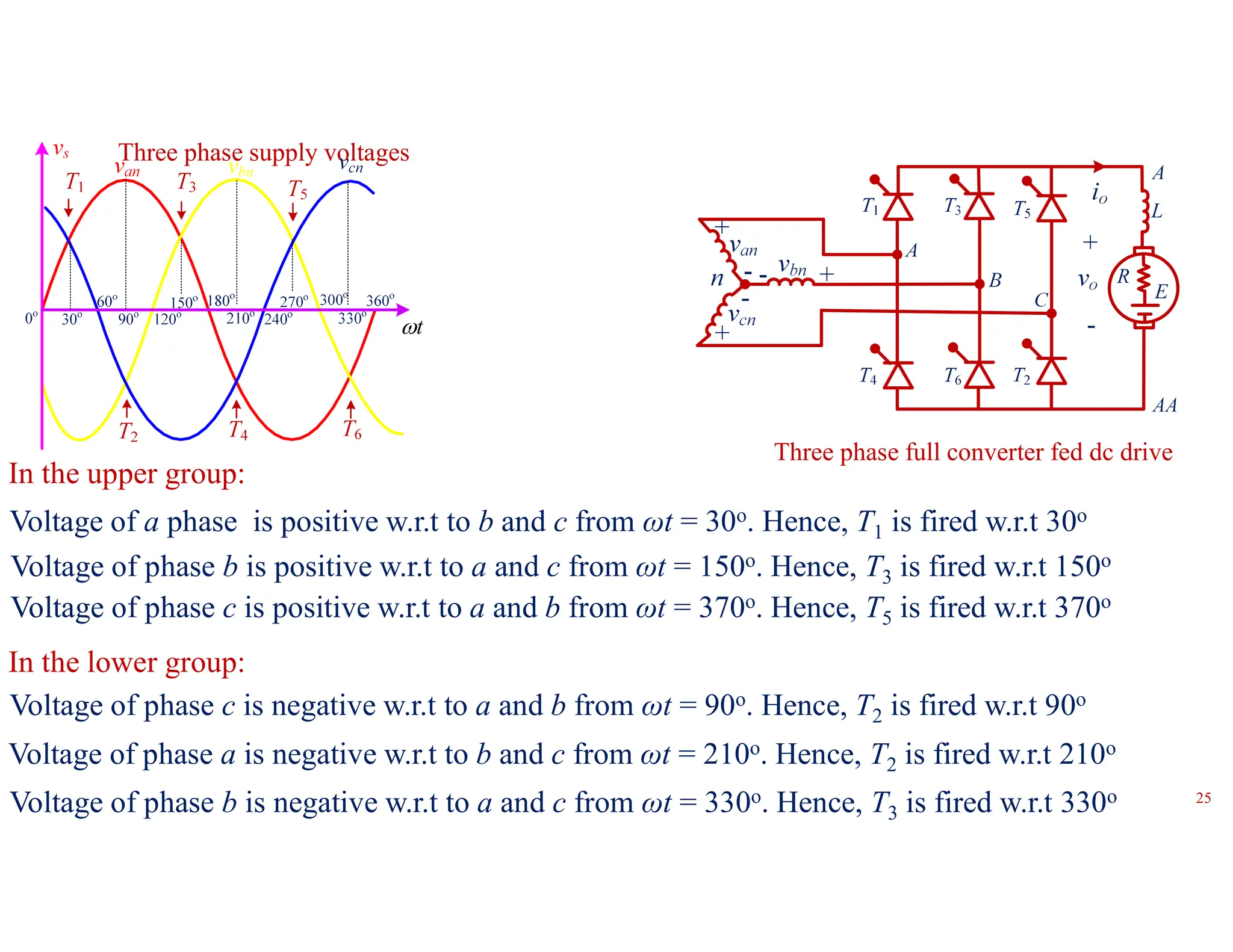
The document discusses the control of DC motors using power semiconductor drives, detailing both single-phase and three-phase converters, their operational characteristics, and torque-speed relationships. It covers the basic principles of electric drives, the implementation of control algorithms through analog and digital circuits, and the behavior of DC motors under different operating scenarios including variable speed control. Key concepts such as the four-quadrant operation, voltage control, and operational characteristics of single-phase and three-phase converters are also examined.