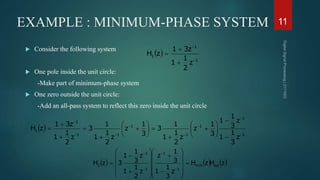
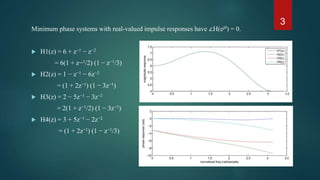
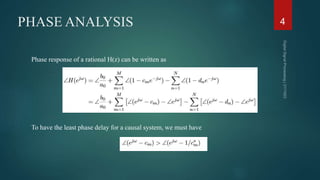
This document discusses minimum phase systems in digital signal processing. It defines minimum phase systems as those with all poles and zeros inside the unit circle, making both the system function and inverse causal and stable. Minimum phase systems are important because they have a stable inverse. The document outlines key properties of minimum phase systems including having the least phase delay, minimum group delay, and concentrating energy in the early part of the impulse response compared to other systems with the same magnitude response. An example demonstrates converting a mixed-phase system to minimum phase by adding an all-pass filter.


![MINIMUM PHASE ⇒ MINIMUM
ENERGY DELAY
Given a causal system with impulse response h[n], we can define the partial
energy of the impulse response as
n
E[n] = Σ |h[k]|2
k=0
A minimum phase system with impulse response hmin[n] has the property
n n
Emin[n] = Σ|hmin[k]|2 ≥ Σ |h[k]|2 = E[n]
k=0 k=0
for all n ≥0 and all h[n] with the same magnitude response ashmin[n].
10](https://image.slidesharecdn.com/dspala-210510115943/85/MINIMUM-PHASE-SYSTEMS-10-320.jpg)