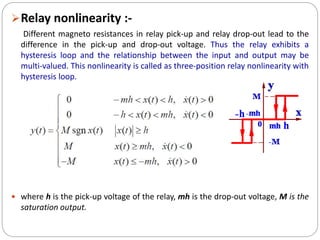
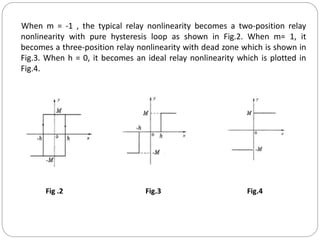
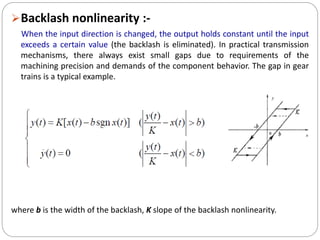
This document discusses nonlinear control systems using phase plane and phase trajectory methods. It defines nonlinear systems and common physical nonlinearities like saturation, dead zone, relay, and backlash. Phase plane analysis is introduced as a graphical method to study nonlinear systems using a plane with state variables x and dx/dt as coordinates. Key concepts are defined like phase plane, phase trajectory, and phase portrait. Methods for sketching phase trajectories include analytical solutions and graphical methods like isoclines. Examples are given to illustrate phase portraits for different linear systems.

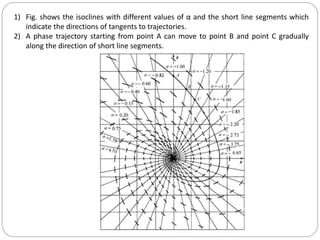
![ Concepts of phase plane analysis
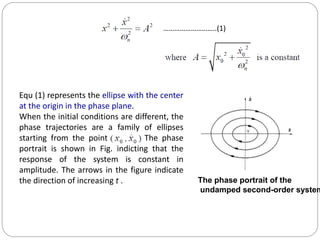
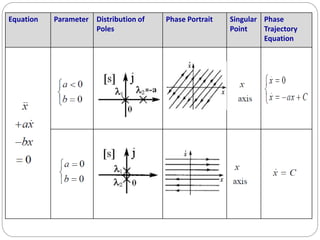
Phase plane, phase trajectory and phase portrait :-
the second-order system by the following ordinary differential equation:
Where is the linear or non-linear function of x and
In respect to an input signal or with the zero initial condition .
The state space of this system is a plane having x and as coordinates which
is called as the phase plane.
Thus one state of the system corresponds to each point in the plane x
As time t varies from zero to infinity,
change in state of the system in x-ẍ
plane is represented by the motion
of the point. The trajectory along
which the phase point moves is
called as phase trajectory. [shown in
fig 3(a) ]](https://image.slidesharecdn.com/nonlinearcontrolsystemphaseplanephasetrajectorymethod-220927233301-03230edf/85/NONLINEAR-CONTROL-SYSTEM-Phase-plane-Phase-Trajectory-Method-pdf-10-320.jpg)