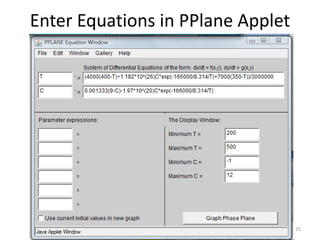
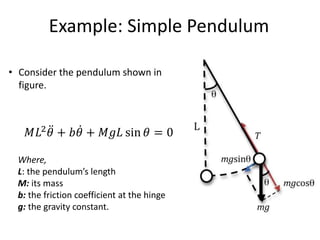
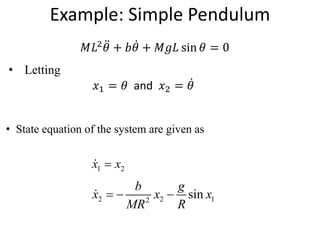
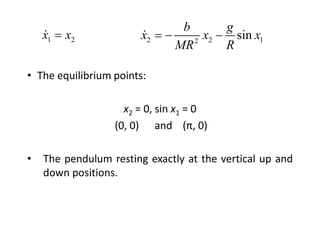
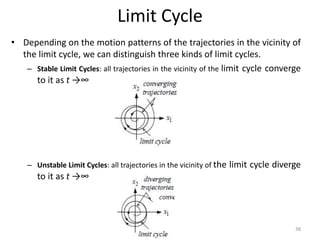
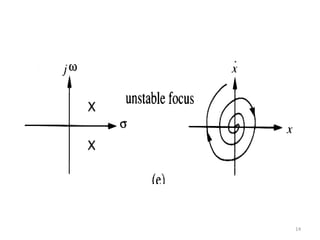
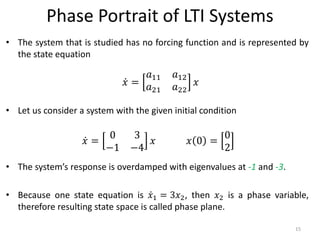
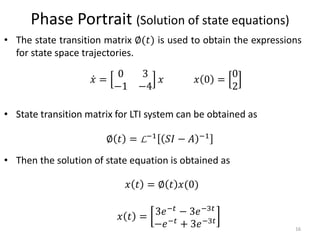
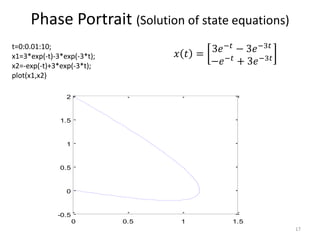
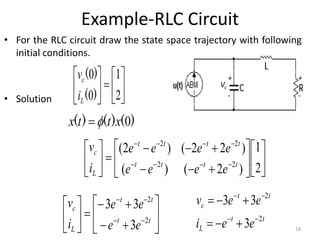
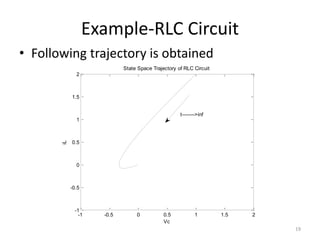
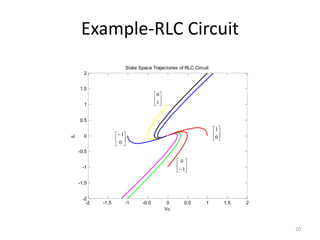
The document discusses phase plane analysis, which is a graphical method to visualize the behavior of nonlinear systems by plotting trajectories in the phase plane defined by the state variables. It provides examples of analyzing linear time-invariant systems by plotting trajectories based on the state equations. The document also discusses concepts like equilibrium points, singular points, and limit cycles that can occur for nonlinear systems through phase plane analysis.
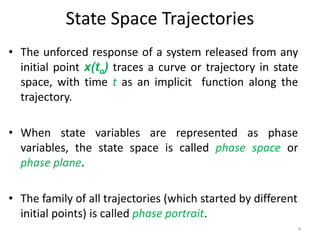
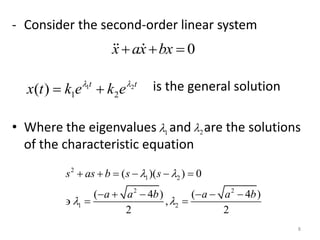
![Examples of LTI systems
23
1.
𝑥1
𝑥2
=
0 1
−1 −4
𝑥1
𝑥2
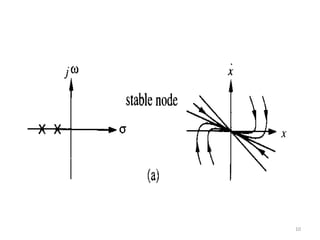
(overdamped Stable System, [stable node])
2.
𝑥1
𝑥2
=
0 1
2 −5
𝑥1
𝑥2
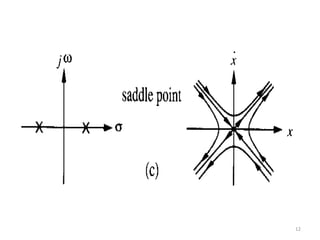
(overdamped unstable [saddle point]
3.
𝑥1
𝑥2
=
0 1
−4 −1
𝑥1
𝑥2
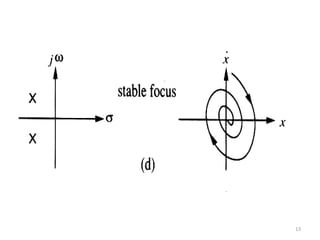
(underdamped stable System, stable focus)
4.
𝑥1
𝑥2
=
0 1
−10 4
𝑥1
𝑥2
(underdamped Unstable System, unstable focus)
5.
𝑥1
𝑥2
=
0 1
−1 6
𝑥1
𝑥2
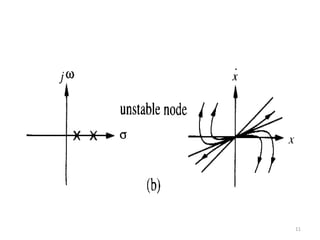
(overdamped Unstable System, [unstable node])](https://image.slidesharecdn.com/lec-7phaseplaneanalysis-230530052056-07432831/85/lec-7_phase_plane_analysis-pptx-23-320.jpg)
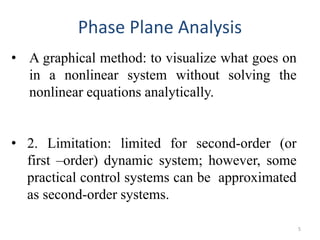
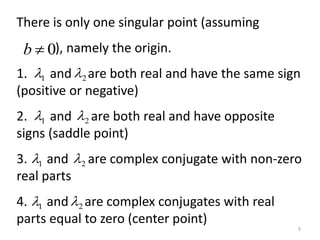
![Software Solution
24
x1dom = linspace(-5,5,51);
x2dom = linspace(-5,5,51);
[x1,x2] = meshgrid(xdom,ydom); % generate mesh of domain
x1dot = x1; % dx1/dt
X2dot= = -x1-4*x2; % dx2/dt
quiver(x1,x2,x1dot,x2dot) % velocity Vectors
𝑥1
𝑥2
=
0 1
−1 −4
𝑥1
𝑥2](https://image.slidesharecdn.com/lec-7phaseplaneanalysis-230530052056-07432831/85/lec-7_phase_plane_analysis-pptx-24-320.jpg)