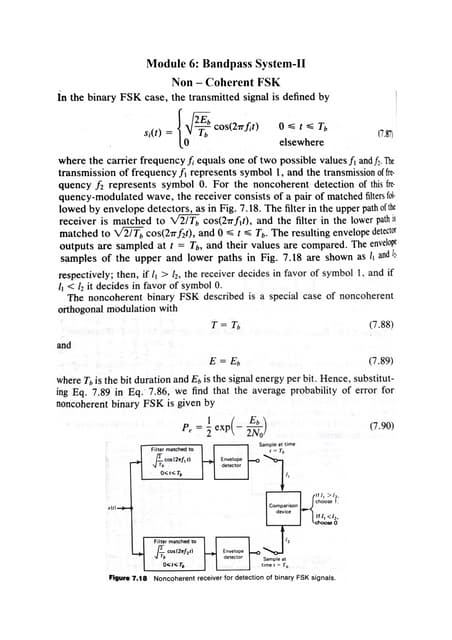
This document discusses signal transmission through linear systems. It begins by introducing linear time-invariant systems and their characterization in both the time and frequency domains using impulse response and transfer functions. It then covers various properties of ideal transmission lines including distortionless transmission where the output signal has the same shape as the input. The document also discusses concepts such as bandwidth, causality, stability, energy spectral density, and power spectral density as they relate to characterizing signals and linear systems.







































![Multiband Transceivers - [Chapter 4] Design Parameters of Wireless Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)




















