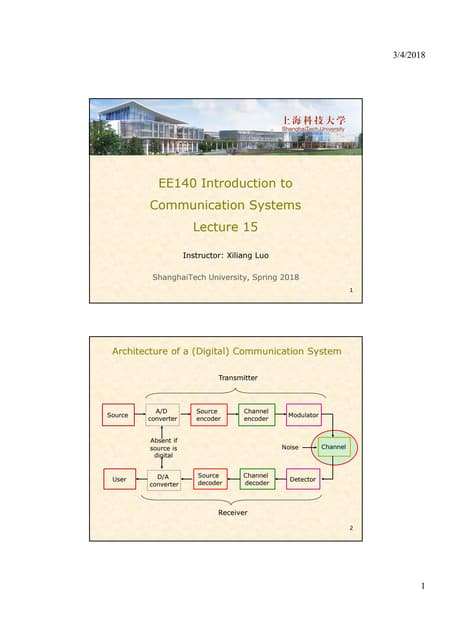
The document discusses correlation functions and their use in designing optimal Wiener filters. It contains the following key points:
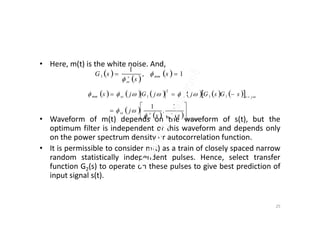
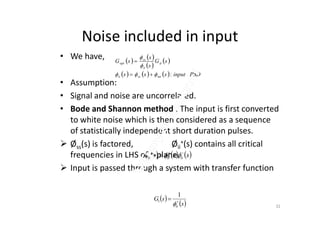
1. Correlation functions describe the relationships between input and output signals of a system and include the auto-correlation of the input, auto-correlation of the desired output, and cross-correlation between input and output.
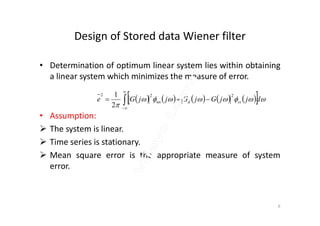
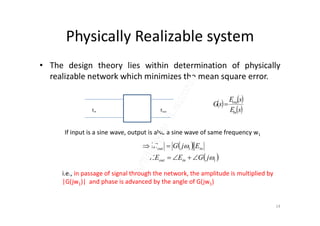
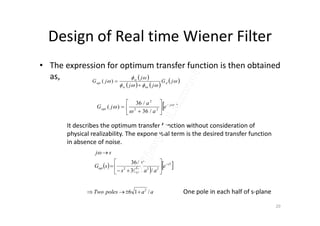
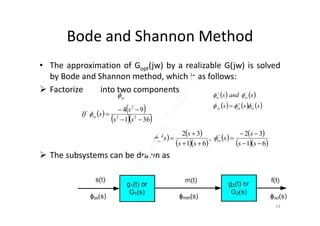
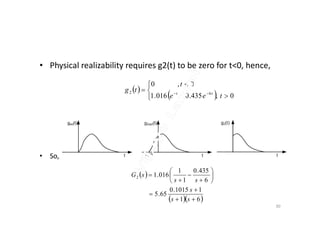
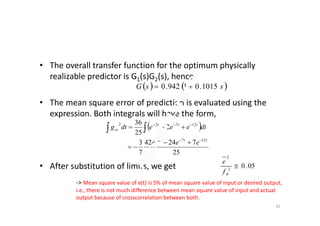
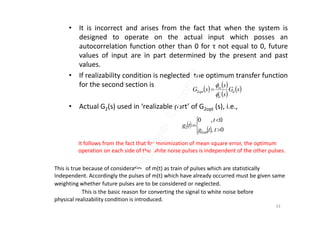
2. The Wiener filter is a linear filter that minimizes the mean square error between the actual and desired filter output. It can be designed by determining the transfer function that results in the lowest mean square error based on the correlation functions.
3. For a stationary input signal, the optimal Wiener filter transfer function is derived by setting the cross-correlation between the input and






















![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
























![Multiband Transceivers - [Chapter 4] Design Parameters of Wireless Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)