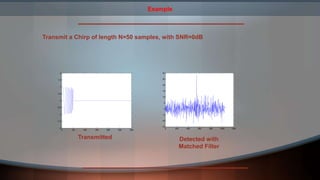
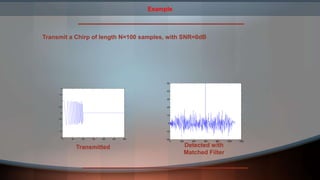
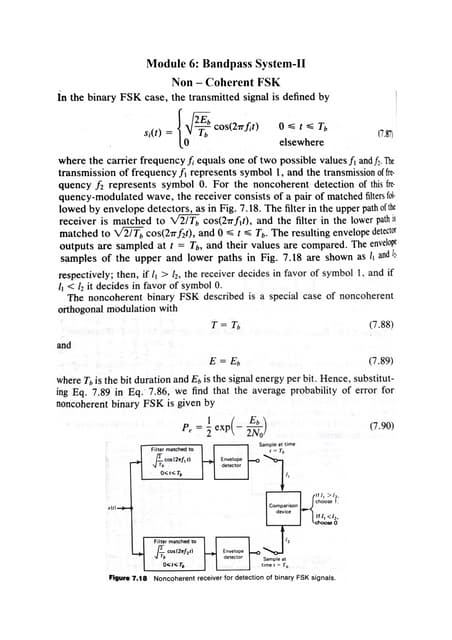
The document describes matched filter detection using LabVIEW. It involves generating a chirp signal, adding noise to create a noisy waveform, and then using a matched filter to detect the chirp signal in the presence of noise. Specifically, it generates a chirp signal, adds white Gaussian noise, and uses a filter with an impulse response that is the time-reversed version of the chirp signal to maximize the signal-to-noise ratio and detect the chirp signal in the noisy waveform. It provides examples detecting chirp signals of different lengths in the presence of noise.


![Typical Application: Radar
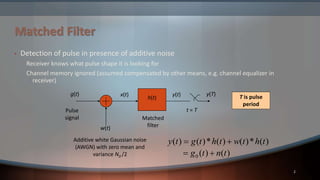
Send a Pulse…
] [ns
n
… and receive it back with noise, distortion …
] [ny
n
0 n
N
Problem: estimate the time delay , ie detect when we receive it. 0 n](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-5-320.jpg)
![Use Inner Product
“Slide” the pulse s[n] over the received signal and see when
the inner product is maximum:
s[]
[ ] [
] * [ ]
y[]
0 n
N
n
1
0
N
ys r n y n s
0 r [n] 0, if n n ys ](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-6-320.jpg)
![Use Inner Product
“Slide” the pulse x[n] over the received signal and see when
the inner product is maximum:
* [ ] [ ] [ ]
if 0 nnMAX s n y n r
0 n
s[]
y[]
N
N
ys
1
0
](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-7-320.jpg)
![Matched Filter
Take the expression
1
*
r n y n s
[ ] [ ] [ ]
0
* * *
s N y n N s y n s y n
[ 1] [ 1] ... [1] [ 1] [0] [ ]
N
n
ys
Compare this, with the output of the following FIR Filter
rˆ[n] h[0]y[n]... h[1]y[n 1] h[N 1]y[n N 1]
Then
y[n] h[n]
rˆ[n] r [n N 1] ys
[ ] [ 1 ], 0,..., 1 * h n s N n n N ](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-8-320.jpg)
![Matched Filter
This Filter is called a Matched Filter
y[n] rˆ[n]
] [nh
[ ] [ 1 ], 0,..., 1 * h n s N n n N
The output is maximum when
rˆ[n] r [n N 1] ys
0 n N 1 n
1 0 i.e. n n N ](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-9-320.jpg)
![Example
We transmit the pulse s [ n ] , n 0 , . . . , N 1 shown below, with
length N 20
0 2 4 6 8 10 12 14 16 18 20
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
] [ns
0 20 40 60 80 100 120 140 160 180 200
12
10
8
6
4
2
0
-2
-4
-6
1.5 ] [ny
1
0.5
0
-0.5
-1
-1.5
0 20 40 60 80 100 120 140 160 180
-2
y[n] rˆ[n]
h[n]
[ ] [ 1 ], 0,..., 1 * h n s N n n N
Received signal:
Max at n=119
119 20 1 100 0 n ](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-10-320.jpg)
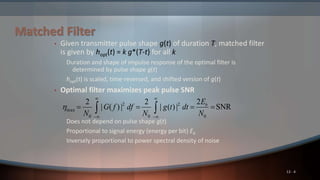
![Example: Chirp
r [n], n 49,...,49 ss
0 5 10 15 20 25 30 35 40 45 50
s[n],n 0,...,49
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
30
25
20
15
10
5
0
-5
-10
-50 -40 -30 -20 -10 0 10 20 30 40 50
s=chirp(0:49,0,49,0.1)](https://image.slidesharecdn.com/matchedfilterdetection-141127221344-conversion-gate01/85/Matched-filter-detection-11-320.jpg)