DETECTION OF RADARSIGNALS IN NOISE
The two basic operations performed by radar.
o Detection of presence of reflecting objects.
o Extraction of information from the received
wave form to obtain such target data as position.
Detection of desired signal along with rejection of
undesired noise clutter and interference In radar is called
SIGNAL PROCESSING>
2.
MATCHED FILTER RECEIVER
A network whose frequency-response function maximizes
the output peak-signal-to-mean noise
(power) ratio is called a matched filter
If the bandwidth of the receiver pass band is wide compared with that
occupied by the signal energy, extraneous noise is introduced by the
excess bandwidth which lowers the output signal-to-noise ratio.
If the receiver bandwidth is narrower than the bandwidth occupied
by the signal, the noise energy is reduced along with a considerable
part of the signal energy.
3.
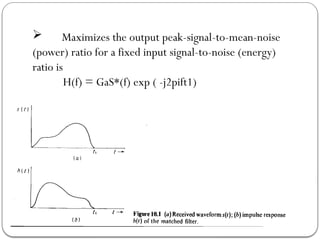
Maximizes theoutput peak-signal-to-mean-noise
(power) ratio for a fixed input signal-to-noise (energy)
ratio is
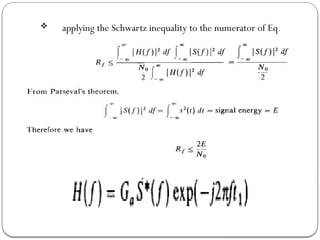
H(f) = GaS*(f) exp ( -j2pift1)
4.
The filterwhose frequency-response function is given by
equation has been called the North filter, the conjugate filter, or
more usually the matched filter. It has also been called the Fourier
transform criterion.
The matched filter frequency-response function may
similarly be written in terms of its amplitude and phase spectra /
H( f ) ) and exp [-j ].
6.
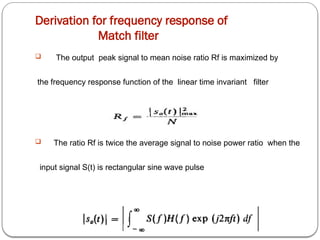
Derivation for frequencyresponse of
Match filter
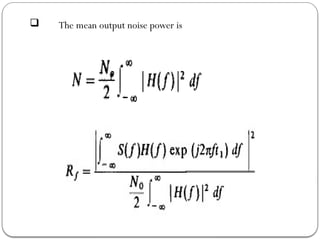
The output peak signal to mean noise ratio Rf is maximized by
the frequency response function of the linear time invariant filter
The ratio Rf is twice the average signal to noise power ratio when the
input signal S(t) is rectangular sine wave pulse
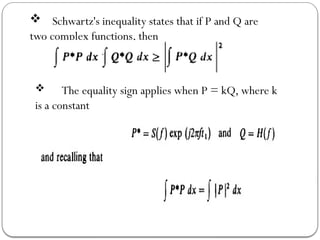
Schwartz's inequalitystates that if P and Q are
two complex functions, then
The equality sign applies when P = kQ, where k
is a constant
9.
applying theSchwartz inequality to the numerator of Eq.
10.
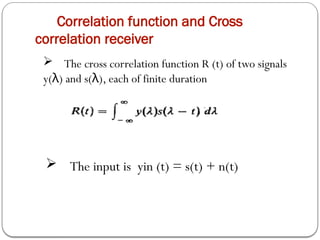
Correlation function andCross
correlation receiver
The cross correlation function R (t) of two signals
y( ) and s( ), each of finite duration
λ λ
The input is yin (t) = s(t) + n(t)
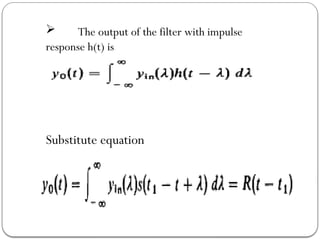
11.
The outputof the filter with impulse
response h(t) is
Substitute equation
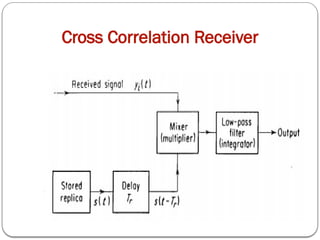
The inputsignal y (t) is multiplied by a delayed
replica of the transmitted signal
s(t -Tr), and the product is passed through a low-pass filter.
The cross-correlation receiver of Fig. tests for the
presence of a target at only a single time delayTr.Targets at
other time delays, or ranges, might be found by varyingTr.
However, this requires a longer search time.
14.
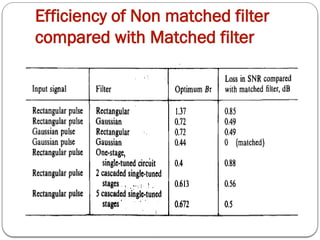
Efficiency of Nonmatched filter
The maximum efficiency of the single-
tuned filter occurs for B ≈ 0.4.
τ
The corresponding loss in signal-to-noise
ratio is 0.88 dB as compared with a matched
filter
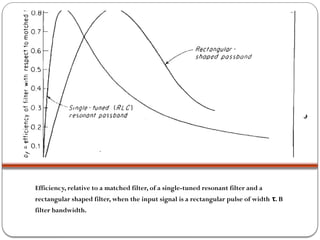
Efficiency, relative toa matched filter, of a single-tuned resonant filter and a
rectangular shaped filter, when the input signal is a rectangular pulse of width . B
τ
filter bandwidth.
17.
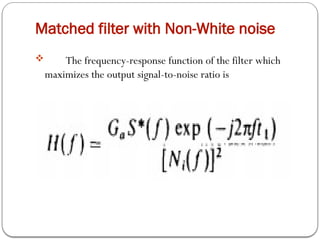
Matched filter withNon-White noise
The frequency-response function of the filter which
maximizes the output signal-to-noise ratio is
18.
For whitenoise [Ni(f)]2 = constant and
the NWN matched-filler frequency-response
function reduces to
The second is the matched filter when
the
input is white noise and a signal whose
spectrum is S(f )/Ni(f ).

![ The filter whose frequency-response function is given by
equation has been called the North filter, the conjugate filter, or
more usually the matched filter. It has also been called the Fourier
transform criterion.
The matched filter frequency-response function may
similarly be written in terms of its amplitude and phase spectra /
H( f ) ) and exp [-j ].](https://image.slidesharecdn.com/7-rs-250901000115-2bbf43ac/85/radar-system-unit-5-part-1-design-and-importance-4-320.jpg)

![ For white noise [Ni(f)]2 = constant and
the NWN matched-filler frequency-response
function reduces to
The second is the matched filter when
the
input is white noise and a signal whose
spectrum is S(f )/Ni(f ).](https://image.slidesharecdn.com/7-rs-250901000115-2bbf43ac/85/radar-system-unit-5-part-1-design-and-importance-18-320.jpg)