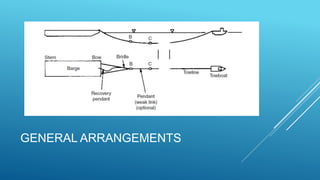
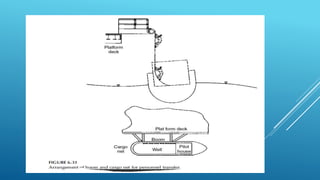
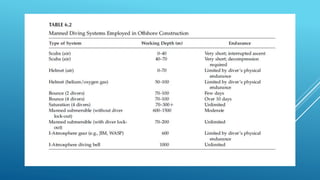
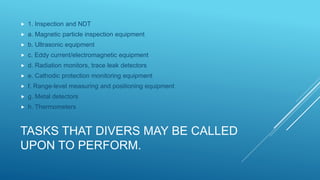
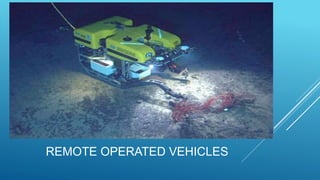
This document summarizes various marine operations including towing, mooring, handling heavy loads at sea, personnel transfer, diving, remote operated vehicles, and underwater construction activities. It discusses the equipment, considerations, and methods used for each type of operation. Towing operations require strong attachments that can withstand dynamic loads. Mooring uses anchors and mooring lines to secure vessels. Personnel transfer faces challenges of transferring people safely between moving vessels in sea states. Diving and ROVs allow underwater inspection and intervention.




























































![[4] ptk 2014 2015 offshore constructions](https://cdn.slidesharecdn.com/ss_thumbnails/mhu59qizqiwfpndume0q-signature-e54dc48fc8dff231a3667ed370712382aa80c6605f7be8d156fba02fb451e6f5-poli-141027141817-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)













































